1.本发明涉及飞行器技术领域,尤其涉及一种仿生侦查型无人机。
背景技术:
2.常规仿生无人机结构设计过于庞大,其飞行轨迹,容易被察觉,同时也不便于在树木密集的丛林飞行;从而使得其不能在侦查领域进行应用;
3.另一方面,如若将飞行器设计较小时,其受到飞行环境的影响较差,尤其是风速过大时,影响飞行器飞行的稳定性。
技术实现要素:
4.本发明的目的是提供一种仿生侦查型无人机,解决常规仿生无人机应用受限,飞行稳定性较差的问题。
5.为解决上述技术问题,本发明采用如下技术方案:
6.本发明提供了一种仿生侦查型无人机,包括机身架体和设置在所述机身架体上的空速计、gps天线、电池、飞控系统、数据链接系统,其特征在于:还包括设置在所述机身架体前端的多个摄像头和录音器、设置在所述机身架体后端的仿形机尾、以及对称设置在所述机身架体两侧的机翼;
7.其中所述机翼为仿形结构,并通过扑翅机械结构进行驱动。
8.进一步地优化,其中所述机身架体为镂空架体结构,并通过轻质碳纤维材料制得,在所述机身架体的顶部设置有铰接架,其中所述机翼包括分别两两对称地铰接安装在所述铰接架上的两个前飞行翼和两个后飞行翼。
9.再进一步地优化,在所述机身架体的两侧通过同一转轴对称安装有两个第一齿轮盘,其中所述第一齿轮盘位于所述前飞行翼的正下方;
10.在所述机身架体的两侧通过同一转轴对称安装有两个第二齿轮盘,其中所述第二齿轮盘位于所述后飞行翼的正下方;
11.其中所述第一齿轮盘与所述第二齿轮盘啮合传动。
12.再进一步地优化,在所述第一齿轮盘与所述第二齿轮盘的端面上分别设置有偏心铰接轴。
13.再进一步地优化,在所述第一齿轮盘上的偏心铰接轴通过调节臂与所述前飞行翼的底部铰接连接;在所述第二齿轮盘上的偏心铰接轴通过调节臂与所述后飞行翼的底部铰接连接。
14.再进一步地优化,在所述调节臂的上下端部分别设置有万向连接器。
15.再进一步地优化,在所述机身架体内的转轴上设置有从动齿轮,并在所述机身架体内设置有用于驱动所述从动齿轮转动的微型电机。
16.再进一步地优化,所述仿形机尾的一端部铰接在所述机身架体上,并在该端部设置有半圆齿轮,其中在所述机身架体上设置有调节所述半圆齿轮上下摆动的调节齿轮驱
动,其中所述调节齿轮通过安装在所述机身架体上的微型舵机进行控制,以调节所述仿形机尾上下偏转。
17.再进一步地优化,所述前飞行翼和所述后飞行翼为交错扑翅。
18.再进一步地优化,所述机翼的顶面为流线形,其底面为平面形。
19.与现有技术相比,本发明的有益技术效果:本技术中在机身架体上铰接安装两个前飞行翼和两个后飞行翼,并且前飞行翼与后飞行翼通过齿轮配合,实现对称交错扑翅飞行,实现仿生无人机在侦查的迷惑性;
20.同时双翅板交错扑翅飞行,能够有效地克服单一扑翅飞行时风阻的影响,从而提高飞行的稳定性。
附图说明
21.下面结合附图说明对本发明作进一步说明。
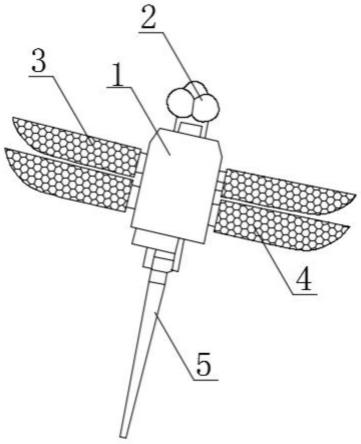
22.图1为本发明仿生侦查型无人机的主体示意图;
23.图2为本发明仿生侦查型无人机内结构示意图;
24.图3为本发明仿生侦查型无人机中调节示意图;
25.图4为本发明仿生侦查型无人机的飞行截面示意图;
26.图5为本发明仿生侦查型无人机的驱动结构示意图;
27.图6为本发明仿生侦查型无人机的尾翼结构示意图。
28.附图标记说明:1、机身架体;1a、铰接架;2、摄像头;3、前飞行翼;3a、第一铰接轴;3b、铰接座;4、后飞行翼;4a、第二铰接轴;5、仿形机尾;5a、半圆齿轮;5b、调节齿轮;6、调节臂;6a、万向连接器;7、第一齿轮盘;7a、第二齿轮盘;7b、偏心铰接轴;8、转轴;8a、从动齿轮;9、微型电机;9a、驱动齿轮。
具体实施方式
29.如图1-6所示,本实施例中公开了一种仿生侦查型无人机,包括机身架体1和安装在所述机身架体1上的空速计、gps天线、电池、飞控系统、数据链接系统;
30.如图1所示,还包括安装在所述机身架体1前端的多个摄像头2和录音器、安装在所述机身架体1后端的仿形机尾5、以及对称安装在所述机身架体1两侧的机翼;
31.其中所述摄像头2一视频方式记录侦查到图像,或通过录音器侦查刺探敌方音频信息;本实施例中,通过数据链接系统即时传输信息传输回终端,或暂时存储在自带数据内存中。
32.本实施例中,可以将所述仿形机尾5设计为蜻蜓尾结构,用于平衡仿生飞行器;
33.其中所述机翼为仿形结构,并通过扑翅机械结构进行驱动。
34.本实施例中,其中所述机身架体1为镂空架体结构,并通过轻质碳纤维材料制得,降低整体结构质量,并在机身架体1涂覆仿生物体态颜色涂料;
35.在所述机身架体1的顶部安装有铰接架1a,其中所述机翼包括分别两两对称地铰接安装在所述铰接架1a上的两个前飞行翼3和两个后飞行翼4;其中所述前飞行翼3和所述后飞行翼4为交错扑翅;
36.其中由于仿生侦查型无人机为了提高隐蔽性,其设计结构较小;常规的仿生飞行
器为单翅飞行,其平衡能力较差在加上电机驱动结构振动,从而降低拍摄质量,影响视频情报获取;
37.本实施例中,通过仿蜻蜓式的无人机,通过对称交错扑翅飞行,提高飞行的稳定性。
38.具体地,如图2所示,在所述机身架体1的两侧通过同一转轴8对称安装有两个第一齿轮盘7,其中所述第一齿轮盘7位于所述前飞行翼3的正下方;
39.具体地,如图3所示,在所述机身架体1的两侧通过同一转轴对称安装有两个第二齿轮盘7a,其中所述第二齿轮盘7a位于所述后飞行翼4的正下方;
40.具体地,如图5所示,其中所述第一齿轮盘7与所述第二齿轮盘7a啮合传动;本实施例中,将所述前飞行翼3和所述后飞行翼4结构设计相同;并且所述第一齿轮盘7和第二齿轮盘7a外径相同;
41.为了达到了所述前飞行翼3和所述后飞行翼4为交错扑翅的作用,如图5所示,可在启示位置,将所述前飞行翼3通过调节臂6调节至最高抬升量;将所述后飞行翼4通过调节臂6调节至最低抬升量;再通过驱动所述第一齿轮盘7和第二齿轮盘7a转动时,从而实现交错扑翅的作用效果。
42.本实施例中,所述机翼的顶面为流线形,其底面为平面形;即所述前飞行翼3和所述后飞行翼4为上述,便于利用空气动力学,提升无人机的飞行稳定性;
43.本实施例中,所述前飞行翼3和所述后飞行翼4分别包括网状骨架和粘合在所述网状骨架上薄膜;降低整体质量,同时保证飞行质量。
44.本实施例中,如图5所示,在所述第一齿轮盘7与所述第二齿轮盘7a的端面上分别安装有偏心铰接轴7b;
45.在所述第一齿轮盘7上的偏心铰接轴7b通过调节臂6与所述前飞行翼3的底部骨架铰接连接;在所述第二齿轮盘7a上的偏心铰接轴7b通过调节臂6与所述后飞行翼4的底部骨架铰接连接;
46.具体地在所述前飞行翼3的底部骨架上一体制成有铰接座3b,便于安装调节臂6;具体地,在所述调节臂6的上下端部分别安装有万向连接器6a,便于提高所述调节臂6调节前飞行翼3或后飞行翼4的灵活性。
47.如图2所示,本实施例中,在所述机身架体1内的转轴8上安装有从动齿轮8a,并在所述机身架体1内安装有用于驱动所述从动齿轮8a转动的微型电机9。
48.如图6所示,本实施例中,所述仿形机尾5的一端部铰接在所述机身架体1上,并在该端部安装有半圆齿轮5a,其中在所述机身架体1上安装有调节所述半圆齿轮5a上下摆动的调节齿轮5b驱动,其中所述调节齿轮5b通过安装在所述机身架体1上的微型舵机进行控制,以调节所述仿形机尾5上下偏转;
49.其中所述机身架体1的尾端安装有u架,所述仿形机尾5通过转轴安装在该u架内,其中所述仿形机尾5端部的半圆齿轮5a与调节齿轮5b啮合传动。
50.本实施例中,通过微型舵机驱动所述调节齿轮5b,从而调节所述仿形机尾5摆动升降;
51.当所述仿形机尾5下降时,则所述无人机的重心沿着机身向前移动,从而使得机身头部向下倾斜,由于无人机翅板扑翅方向是垂直于机身,从而使得施加在机身上的力,可以
分为向上和向前,从而调节无人机向前飞行;
52.当所述仿形机尾5平直时,所述无人机的重心沿着机身向后移动,从而使得机身头部水平,由于无人机翅板扑翅方向是垂直于机身,从而使得施加在机身上的力只克服自身重力,从而达到滞空的效果。
53.在本发明创造的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
54.以上实施例仅是对本发明创造的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。