1.本实用新型涉及搬运机器人的技术领域,具体涉及一种搬运机器人的驱动减速电机。
背景技术:
2.现有的搬运机器人使用的驱动模块中的减速机和电机之间使用联轴器进行动力传输,驱动器与电机是分开安装的,即驱动器安装于搬运机器人的底盘上,然后通过连接导线与电机电性连接,从而实现控制电机。这样电机和驱动器之间需要较长的导线连接,线路复杂,整体需要的安装尺寸大,占用空间,安装不便。
技术实现要素:
3.1、实用新型要解决的技术问题
4.针对以上的现有的搬运机器人使用的驱动模块中的电机和驱动器之间需要较长的导线连接,线路复杂,整体需要的安装尺寸大,占用空间,安装不便的问题,本技术提供一种搬运机器人的驱动减速电机。
5.2、技术方案
6.为解决上述问题,本实用新型提供的技术方案为:
7.一种搬运机器人的驱动减速电机,包括:电机、连接至电机的减速机和连接至减速机的输出端的驱动轮;电机的壳体的两侧设有用于将电机安装于搬运机器人的底盘的安装耳板;电机的壳体还设有电性连接插头;电性连接插头插接有用于控制电机的驱动器;驱动器通过电性连接插头电性连接至电机;驱动器可拆卸安装于两个安装耳板中的一个。
8.进一步地,两个安装耳板中的一个在远离电机的侧边形成有螺纹孔;驱动器形成有用于配合螺纹孔的配合孔;驱动器通过螺钉穿过配合孔并旋入螺纹孔可拆卸安装于安装耳板。
9.进一步地,电性连接插头的两端分别插接于电机的壳体和驱动器。
10.进一步地,电机的壳体还设有两个电性连接插头;两个电性连接插头分别设置于安装耳板的上侧和下侧。
11.进一步地,安装耳板的两端形成有安装孔;安装耳板通过螺钉穿过安装孔并旋入搬运机器人的底盘形成的螺纹孔内可拆卸安装于该底盘。
12.进一步地,安装耳板中的另一个还设有用于插入定位销以预安装安装耳板的定位孔;定位孔与搬运机器人的底盘形成的定位孔配合。
13.进一步地,安装耳板形成有用于限位安装电机并对电机进行支撑的限位支撑部;电机的壳体形成有用于配合限位支撑部的限位凹槽;限位支撑部插入限位凹槽内。
14.进一步地,电机的输出轴为滚齿轴;滚齿轴与减速机内设有的行星齿轮直接啮合。
15.进一步地,电机的壳体形成有多个用于对电机进行散热的鳍片。
16.进一步地,驱动轮通过多个螺钉可拆卸固定至减速机的外齿圈。
17.3、有益效果
18.采用本实用新型提供的技术方案,与现有技术相比,具有如下有益效果:
19.本实用新型提供的搬运机器人的驱动减速电机将驱动器和电机均固定在安装耳板上构成一个整体,整体需要的安装尺寸小,节约安装空间,安装方便。然后通过电性连接插头直接将驱动器电性插接于电机外壳上,实现驱动器与电机之间的电性控制,二者之间不需要较长的导线连接,线路简单。
附图说明
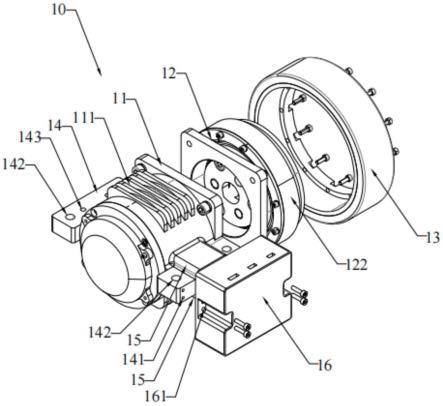
20.图1为本实用新型实施例提出的搬运机器人的驱动减速电机的示意图;
21.图2为图1中的搬运机器人的驱动减速电的地减速机的示意图;
22.图3为图1中的搬运机器人的驱动减速电机的电机和安装耳板的示意图;
23.搬运机器人的驱动减速电机10,电机11,鳍片111,滚齿轴112,限位凹槽113,减速机12,行星齿轮121,外齿圈122,驱动轮13,安装耳板14,螺纹孔141,安装孔142,定位孔143,限位支撑部144,电性连接插头15,驱动器16,配合孔161。
具体实施方式
24.为进一步了解本实用新型的内容,结合附图及实施例对本实用新型作详细描述。
25.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关实用新型,而非对该实用新型的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与实用新型相关的部分。本实用新型中所述的第一、第二等词语,是为了描述本实用新型的技术方案方便而设置,并没有特定的限定作用,均为泛指,对本实用新型的技术方案不构成限定作用。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。同一实施例中的多个技术方案,以及不同实施例的多个技术方案之间,可进行排列组合形成新的不存在矛盾或冲突的技术方案,均在本实用新型要求保护的范围内。
26.实施例1
27.如图1至图3所示,为本实用新型的一种搬运机器人的驱动减速电机10,包括:电机11、减速机12和驱动轮13。减速机12连接至电机11的输出端,驱动轮13连接至减速机12的输出端,电机11转动时通过减速机12带动驱动轮13进行转动。电机11的壳体的两侧设有安装耳板14。安装耳板14用于将电机11安装于搬运机器人的底盘。电机11的壳体还设有电性连接插头15,电性连接插头15插接有驱动器16以用于控制电机11。驱动器16通过电性连接插
头15电性连接至电机11,这样免去线路连接,是的搬运机器人内部的线路更加简洁。驱动器16可拆卸安装于两个安装耳板14中的一个,从而通过安装耳板14与电机11构成一个整体,安装更加方便,所需的安装空间较小。
28.也就是说,上述的搬运机器人的驱动减速电机10将驱动器16和电机11均固定在安装耳板14上构成一个整体,整体需要的安装尺寸小,节约安装空间,安装方便。然后通过电性连接插头15直接将驱动器16电性插接于电机11外壳上,实现驱动器16与电机11之间的电性控制,二者之间不需要较长的导线连接,线路简单。
29.作为一种具体的实施方式,两个安装耳板14中的一个在远离电机11的侧边形成有螺纹孔141,驱动器16形成有配合孔161以用于配合螺纹孔141。在安装时,将驱动器16通过螺钉穿过配合孔161并旋入螺纹孔141可拆卸安装于安装耳板14,这样便于对驱动器16进行拆装,提高拆装效率。
30.作为一种具体的实施方式,电性连接插头15的两端分别插接于电机11的壳体和驱动器16。这样通过驱动器16和电机11将电性连接插头15夹在二者之间,能够有效防止电性连接插头15松脱,电性连接结构更加可靠。进一步地,电机11的壳体还设有两个电性连接插头15,以保证电性连接结构的可靠性,该两个电性连接插头15分别设置于安装耳板14的上侧和下侧。
31.作为一种具体的实施方式,安装耳板14的两端形成有安装孔142,搬运机器人的底盘形成的螺纹孔141。安装耳板14通过螺钉穿过安装孔142并旋入搬运机器人的底盘形成的螺纹孔141内可拆卸安装于该底盘,这样便于对电机11、减速机12、驱动轮13和驱动器16构成的整体进行安装拆卸,组装效率高。
32.作为一种具体的实施方式,安装耳板14中的另一个还设有定位孔143。定位孔143与搬运机器人的底盘形成的定位孔143配合。在安装时,将定位销同时插入安装耳板14的定位孔143以及底盘的定位孔143内以预安装安装耳板14,从而提高安装效率。
33.作为一种具体的实施方式,安装耳板14形成有限位支撑部144以用于限位安装电机11并对电机11进行支撑。电机11的壳体形成有限位凹槽113以用于配合限位支撑部144。安装时,将限位支撑部144插入限位凹槽113内,能够对电机11进行精准的预定位,并对电机11进行一定的支撑,从而提高整体结构的稳定性。
34.作为一种具体的实施方式,电机11的输出轴为滚齿轴112,滚齿轴112与减速机12内设有的行星齿轮121直接啮合,从而省掉联轴器,减小整体机构的长度。
35.作为一种具体的实施方式,电机11的壳体形成有多个鳍片111以用于对电机11进行散热。
36.作为一种具体的实施方式,驱动轮13通过多个螺钉可拆卸固定至减速机12的外齿圈122,从而保证驱动轮13与减速机12输出端的转动同步性。
37.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
