1.本发明属于矿井下混凝土搬运领域,具体涉及一种矿山井下用物料搬运机械臂及搬运装置。
背景技术:
2.巷道的开拓与维护是我国矿井下生产的重要部分,锚喷支护是我国矿井巷道支护的主要技术方式。煤巷锚喷支护比例已达50%以上,岩巷锚喷支护比例接近100%。由于我国矿井巷道所处地层条件较为复杂,围岩性质千差万别,采动影响亦较为强烈,尤其随着我国矿井开采规模的扩大和井巷工程的不断延伸,国内矿井相继进入了深部开采状态,冲击地压、矿压加剧,巷道围岩变形明显增大,地温显著升高。所以,矿井巷道掘进与支护工程不仅总量浩大,而且难度高、安全隐患大,支护费用常高达巷道工程总费用的50%以上。
3.在矿井下巷道壁面的封闭主要采用混凝土喷涂。在大型巷道中,可以采用远距离管道输送搅拌好的混凝土,末端采用大型湿喷设备。而中小型巷道由于空间有限,大型湿喷设备无法进入;由于时间和空间的制约,不具备输送含水混凝土的条件,因为一旦输送被中断,混凝土就有凝结的可能。所以中小型巷道只能进行干料运输。
4.干料运输一般采用矿车,但是如何将物料从矿车内转移下来,这个问题一直没有得到很好的解决。具备自动翻车设备的巷道很少,一般卸料采用人力加铁锹的方式,作业效率慢且劳动强度大。同时,将物料装载至矿车上,也存在同样的问题。
5.基于上述,发明一种用于矿井下湿喷用物料搬运机械臂,可代替人工实现物料的搬运,降低井下作业劳动强度。
技术实现要素:
6.本发明要解决的技术问题是实现矿井下有限空间内物料的搬运,为解决上述问题,提供一种矿山井下用物料搬运机械臂。
7.本发明的目的是以下述方式实现的:
8.一种矿山井下用物料搬运机械臂,包括机械臂本体,机械臂本体一端设有第一回转驱动件,第一回转驱动件回转部固定连接转台,转台上铰接第一连杆、第一机械臂和第一油缸;第一连杆另一端铰接三角支架的第一顶点,第一机械臂另一端铰接三角支架的第二顶点,三角支架的第二顶点同时铰接第二机械臂,三角支架的第三顶点铰接第二连杆;
9.第一油缸另一端铰接在第一机械臂上,第二油缸一端铰接在第一机械臂上,第二油缸另一端铰接在第二机械臂上;第二连杆另一端铰接在腕架上,第二机械臂另一端铰接在腕架上;腕架上固定连接头部回转驱动件的固定部分,头部回转驱动件的回转部固定连接斗架,斗架上固定连接抓斗油缸,抓斗油缸的活塞杆固定连接抓斗推杆,抓斗推杆铰接抓斗连杆,抓斗连杆另一端铰接抓斗,抓斗铰接于斗架下部。
10.第一连杆、转台、第一机械臂和三角支架为构成平行四边形四连杆机构,三角支架、第二机械臂、腕架和第二连杆构成平行四边形四连杆机构。
11.所述的第一连杆、第二连杆、三角支架均为两个。
12.所述的第二机械臂上固定有照明灯。
13.一种矿山井下用物料搬运装置,第一回转驱动件的固定部分安装在底盘安装架上,所述的底盘安装架前端安装有控制器,底盘安装架上安装有电磁启动器,电动机安装于底盘安装架,液压泵安装于电动机端部,底盘安装架固定上述的一种矿山井下用物料搬运机械臂的第一回转驱动件的固定部,所述的控制器连接抓斗油缸、第一油缸、第二油缸、第一回转驱动件和头部回转驱动件。
14.所述的底盘安装架四角位置底部安装有支腿,支腿通过伸缩杆连接到底盘安装架上,支腿的数量至少为四个。
15.所述的底盘安装架的前方和后方安装有四个照明灯。
16.相对于现有技术,本发明体积较小,适合在井下狭窄空间内移动,不影响其它作业机构的运输,本发明可对矿井下物料进行搬运转移, 可从地面、矿车或其他容器内取料,通过履带运动、机械臂旋转、伸展缩回,上下运动,将物料转移到目标位置,本发明可替代矿井下人员作业,降低工人劳动强度,提高劳动效率,配合矿井下喷涂机,作为其上料设备;也可配合矿车卸货、装货,作为搬运设备。
附图说明
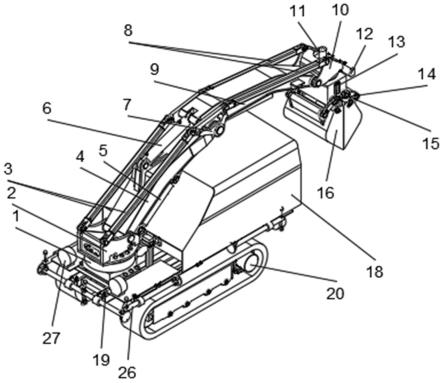
17.图1是本发明机械臂立体示意图。
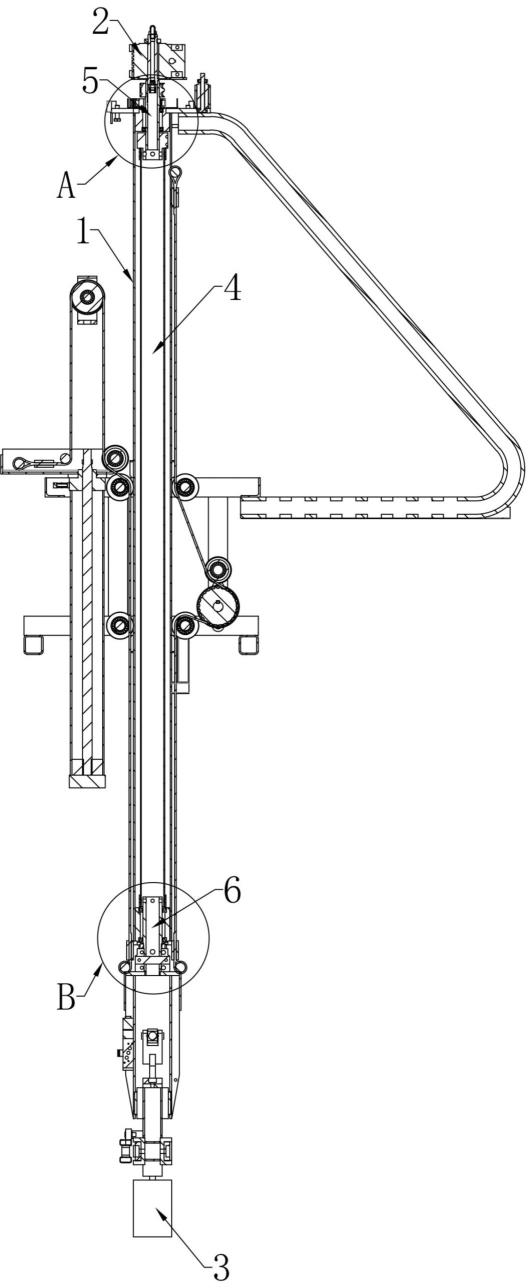
18.图2是本发明机械臂正视示意图。
19.图3是本发明a处放大图。
20.图4为b-b剖视图。
21.图5是本发明搬运装置正视示意图。
22.图6是本发明搬运装置俯视示意图。
23.图7是本发明支腿收起、抓斗闭合时搬运装置立体示意图。
24.图8为本发明支腿伸开、抓斗打开时搬运装置立体示意图。
25.图9为c处放大图。
26.其中,1-回转驱动件,2-转台,3-第一连杆,4-第一机械臂臂,5-第一油缸,6-第二油缸,7-三角支架,8-第二连接杆,9-第二机械臂,10-腕架,11-抓斗油缸,12-头部回转驱动件,13-斗架,14-抓斗推杆,15-抓斗连杆,16-抓斗,17-作业照明灯,18-外罩,19-底盘安装架,20-履带底盘,21-电磁启动器,22-电动机,23-液压泵,24-控制器,25-油箱及管路,26-支腿,27-前后照明灯。
具体实施方式
27.下面结合附图和具体实施方式对本发明作进一步详细说明。
28.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
29.如图1-3所示的一种矿山井下用物料搬运机械臂,包括机械臂本体,机械臂本体一端设有第一回转驱动件1,第一回转驱动件1安装在底盘安装架上,第一回转驱动件1可实现360度回转第一回转驱动件1为现由于技术产品,此处不再详细介绍,具体详见cn200920040150.x,带动转台转动,进而带动整个机械臂转动。第一回转驱动件1固定连接转台2,本实施例中第一回转驱动件1和连接转台2的固定方式采用的是螺栓固定。
30.转台2上铰接第一连杆3、第一机械臂4和第一油缸5,转台转动时,第一连杆3、第一机械臂4、第一油缸5均跟随转动。
31.第一连杆3另一端铰接三角支架7,三角块支架的第一个顶点71铰接铰接第一连杆3,第三个顶点73铰接第二连杆8,第二个顶点72铰接第一机械臂4和第二机械臂9,采用三角块支架的结构更稳固支撑机械臂,确保第一机械臂的第一四连杆构成平行四边形机构,第一四连杆指的是转台2、第一连杆3、第一机械臂4和三角支架7组成的第一四连杆,是一个可以活动的平行四边形;机构和第二机械臂的第二四连杆,第二四连杆指的是三角支架7、第二连杆8、第二机械臂9和腕架10组成的第二四连杆,是一个可以活动的平行四边形。结构保持一致性,两个平行四边形机构可以保证碗架10级碗架上固定的其他部件始终处于一个状态,保证抓斗始终处于垂直向下方向。
32.第一机械臂4另一端铰接第二机械臂9,第一机械臂4和第二机械臂9一起铰接在三角块支架的同一个顶点72处上,第一油缸5另一端铰接在第一连杆3上,第一机械臂的俯仰动作由第一油缸5的伸缩来实现。
33.第二油缸6一端铰接在第一机械臂4上,另一端铰接在第二机械臂9上,第二机械臂的俯仰动作由第二油缸6的伸缩来实现。
34.三角支架7铰接第二连杆8,第二连杆8另一端铰接在腕架10上,第二机械臂9另一端也铰接在腕架10上。
35.腕架10上固定连接头部回转驱动件12,头部回转驱动件12的结构和第一回转驱动件1的结构相同,只是体积小于第一回转驱动件1,工作原理相同。头部回转驱动件12上下均有螺栓孔,头部回转驱动件12的固定部分采用螺栓固定连接到腕架10上,头部回转驱动件12的转动部件固定连接斗架13,头部回转驱动件12旋转时,可以带动斗架13旋转,头部回转驱动件12为其下方所有部件提供回转动力,头部回转驱动件12可以旋转,进而带动抓斗转动,从而改变斗架13的水平方向,进而改变抓斗16的水平方向,以适应物料的容器,方便物料的抓取。斗架13是抓斗16的保持架,带动抓斗16回转,并在抓斗开合的同时提供支撑作用,斗架13上设置有垂直的导轨131,导轨131可以限位抓斗推杆14沿垂直方向上下移动。
36.斗架13上固定连接抓斗油缸11的缸筒,抓斗油缸11为抓斗16提供张开和关闭的动力。
37.抓斗油缸11的活塞杆111上固定连接抓斗推杆14,抓斗推杆14铰接抓斗连杆15,抓斗连杆15另一端铰接抓斗16。抓斗推杆14运动时,需要通过抓斗连杆15,才能控制抓斗的开合。抓斗推杆14活动范围受限于斗架13,因为抓斗推杆14在斗架13上设置的导轨131内运动,在活塞杆111的带动下,对抓斗进行开合控制。
38.抓斗连杆15一端铰接到抓斗推杆14上,另一端铰接于抓斗16上,抓斗16通过铰接件铰接于斗架13下部。抓斗推杆14运动时,通过抓斗连杆15推拉抓斗。因抓斗连杆15铰接其在斗架13上,在抓斗连杆的带动下,抓斗实现张开与合闭,抓斗15的形状为贝壳形状,有两
个贝壳形状的两个抓斗组成,两个抓斗闭合时,可以将物料包括其中,两个抓斗分开时,可以将物料倒出。
39.作业照明灯17固定于第二机械臂9上,用于井下作业的照明。
40.如图4-7所示,履带底盘20是整个设备的行驶平台,履带底盘20上安装有履带,可对设备进行前进、后退、转向等操作,方便设备的迁移。底盘安装架19固定于履带底盘20上,用于承载整个设备,电磁启动器21是设备电源控制装置,安装于底盘安装架19前端,可实现设备电源的接通与断开,电动机22安装于底盘安装架19上,布置在电磁启动器21后部,是设备的主动力源,为液压泵23提供动力,液压泵23安装于电动机22端部,为整个设备执行元件泵送液压油,控制器(手动多路阀)24安装于底盘安装架19上,分别有左轮油阀、右轮油阀、底部回转阀、第一油缸阀、第二油缸阀、抓斗油缸阀、第一回转驱动件阀、头部回转驱动件阀,左轮油阀控制左轮的动作、右轮油阀控制右轮的动作、第一油缸阀控制第一油缸、第二油缸阀控制第二油缸、抓斗油缸阀控制抓斗油缸、第一回转驱动件阀控制第一回转驱动件、头部回转驱动件阀控制头部回转驱动件,从而控制整机动作,油箱及管路25安装于底盘安装架19,为整机执行元件提供液压油,外罩18固定于底盘安装架19上,外罩18内覆液压泵23,电磁启动器21和油箱及管路25等,盖用于设备的防护,前后照明灯27安装于底盘安装架19的前方和后方,为机身行驶时提供照明。
41.支腿26通过伸缩杆连底盘安装架19,伸缩杆上设置有固定孔,通过固定孔固定在盘安装架19上,底盘安装架19的四角位置底部安装有四个支腿,为更好起到支撑作用,在底盘安装架前后方向也分别安装有两个支腿,布置在底盘安装架19下部,支腿26采用螺纹和伸缩杆固定,当工作状态时,支腿26伸出将顶起底盘安装架19,使得履带离开地面;当非工作状态时,支腿26收起,履带接触地面从而可以移动。在设备工作过程中,支撑整个设备,用于增加机身的稳定性。
42.该机械臂的工作原理是:
43.第一回转驱动件1固定部固定在底盘安装架19上,第一回转驱动件1的回转部固定连接转台2,当第一回转驱动件1的回转部旋转可以带动整个机械臂转动,第一油缸5的伸缩实现第一机械臂4的俯仰动作,第二油缸6的伸缩实现第二机械臂9的俯仰动作,第一连杆3、转台2上部、第一机械臂4和三角支架7一边为构成平行四边形机构,同时,三角支架7另一边、第二机械臂9、腕架10和第二连杆8构成另外一个平行四边形机构,在这两个平行四边形机构的作用下,可以保证碗架部位始终处于垂直向下的方向,抓斗油缸11穿过头部回转驱动件12,固定在斗架13上。抓斗油缸为抓斗16为提供张开和关闭的动力。头部回转驱动件12为其下方所有部件提供回转动力,头部回转驱动件12可以改变抓斗16的水平方向,可以使斗架13进行旋转,以适应物料的容器,方便物料的抓取。斗架13带动抓斗回转,并在抓斗开合的同时提供支撑作用,抓斗推杆14固定于抓斗油缸11的活塞杆111。其活动范围受限于斗架,在活塞杆111的带动下,对抓斗进行开合控制,
44.当抓斗油缸11的活塞杆111向下运动时,推动抓斗推杆14沿斗架13上的垂直导轨131向下运动,因抓斗连杆15一端铰接在抓斗推杆14,一端铰接在抓斗16上,并且抓斗16铰接斗架13上,在在抓斗连杆15的带动下,抓斗16张开,可以实现对物料的抓取,使物料进入抓斗16内部,当抓斗油缸11的活塞杆111向上运动时,拉动抓斗推杆14沿斗架13上的垂直导轨131向上运动,因抓斗连杆15一端铰接在抓斗推杆14,一端铰接在抓斗16上,在抓斗连杆
15的带动下,抓斗16闭合,使物料包裹在抓斗16内部,通过抓斗油缸11和头部回转驱动件12的双重作用下,可以改变抓斗16的位置和姿态。
45.该物料搬运装置的工作原理是:
46.该搬运装置通过履带底盘20上的履带移动到需要搬运物体的附近,使该设备的前后四个支腿26支与地面,用于增加机身的稳定性,待该设备稳定固定好后,启动控制器(手动多路阀)24中的各路电磁阀,在电磁启动器21,电动机22和液压泵23的共同作用下操纵机械臂运动,设备通过回转驱动件1的旋转可以带动整个机械臂转动。
47.以上所述的仅是本发明的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本发明整体构思前提下,还可以作出若干改变和改进,这些也应该视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。