人机协调型机器人
1.本技术为分案申请;其母案的申请号为“2017107995866”,发明名称为“人机协调型机器人”。
技术领域
2.本发明涉及与人共享作业空间的人机协调型机器人。
背景技术:
3.近年来,不使用安全栅栏,且与作业人员等人共享作业空间而进行工作的人机协调型机器人正在普及。这种人机协调型机器人大多构成为,具备探测与人的接触的接触传感器及力传感器,如果探测到与人的接触,则停止动作,不使人受到危害。
4.作为与之相关的现有技术,例如日本特开2008-200764号公报中公开了一种作业用机械手,作业用机械手具备机器人等的移动体和机械手部,移动体具有移动部及控制部,机械手部具有附属于移动体且检测与作业对象的接触状态的接触传感器及检测接触时的接触力的力传感器,还记载了,控制部具备根据接触传感器所检测的接触状态或者力传感器所检测的接触力来掌握作业状态的装置,同时具备以接触传感器或者力传感器所检测的、具有人为的规律性的模式信息作为命令来解释的装置。
5.另外,人故意地对机器人作用外力,使该机器人进行退避动作的技术也广为人知。例如日本特开2016-153156号公报中记载有一种人机协调型机器人系统,具备:外力检测部,其检测作用于机器人的外力;退避动作指令部,其在由外力检测部检测的外力大于第一阈值的情况下,指令使机器人向减小外力的方向移动的退避动作;外力变动监视部,其在指令退避动作之后的规定时间的外力检测值的变动幅度小于第二阈值的情况下,停止退避动作。
6.在人机协调型机器人与人接触而停止的情况下,机器人为了重新开始作业,需要使用一些装置再起动机器人。作为一个例子,具有按下机器人的控制面板的再起动按钮进行再起动的方法,但不限于控制面板总是处于机器人的附近。在再起动按钮处于远离机器人的地方的情况下,人(作业人员)必须移动到具有再起动按钮的地方,机器人的生产力降低。另一方面,如果将再起动按钮设置在机器人附近,则即使机器人停止也能够迅速的再起动,因此,防止生产力的降低,但由于将再起动按钮与控制面板分开地设置,因此,与在控制面板设置再起动按钮的情况相比,花费成本。
7.日本特开2008-200764号公报中记载的技术解释了,将具有人为的规律性的模式信息解释为命令,因此,即使不使用再起动按钮等,也能够使机械手(机器人)进行规定的动作。但是,人机协调型机器人中用于接触的探测的传感器大多探测机器人手臂整体的接触。因此,将现有技术应用于人机协调型机器人时,即使在人错误地给机器人赋予规律性的力的情况下,机器人也有可能违反人的意图而再起动。例如,人进行连续两次拍击机器人的动作模式时,进行机器人再起动的内容的设定的情况下,如果人错误地连续两次拍击机器人,则机器人有可能违反人的意图而再起动,使人暴露在危险中。
8.作为其解决方法,还考虑如下方法,将应判断解释为再起动等的命令的动作模式设定为无意性地进行的可能性低的复杂的模式,但该方法具有便利性降低的缺点。因此,作为动作模式,优选尽可能容易地执行。
技术实现要素:
9.因此,本发明的目的在于,提供一种人机协调型机器人,即使在比较简单的动作模式被设为对机器人的命令的情况下,也尽可能消除机器人违反人的意图而动作的可能性。
10.为了达成上述目的,本愿发明提供一种人机协调型机器人,与人共享作业空间来进行工作,其特征在于,具有:传感器部,其在外力作用于上述机器人时,指定被施加了上述外力的上述机器人的部位;判定部,其判定上述外力是否基于预先决定的模式进行,且判定被施加了上述外力的上述机器人的部位是否相当于预先决定的规定部位;以及指令部,其在上述外力基于上述模式进行且被施加了上述外力的上述机器人的部位相当于上述规定部位的情况下,使上述机器人进行与上述模式预先关联的动作。
11.优选的实施方式中,上述传感器部具有检测施加于上述机器人的外力的大小及力矩的六轴力传感器。
12.或者,上述传感器部具有检测人与上述机器人接触的情况及所接触的上述机器人的部位的接触传感器。
13.或者,上述传感器部具有检测上述机器人的各轴的扭矩的扭矩传感器。
14.上述模式能够基于施加到上述机器人的外力的大小、方向及次数的至少一项来设定。
附图说明
15.本发明的上述和其它目的、特征及优点,通过参照附图说明以下的优选的实施方式,而将变得更加明朗。
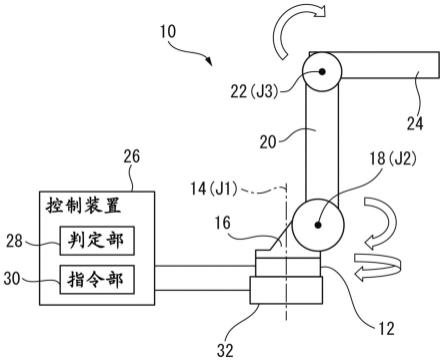
16.图1是表示本发明的第一实施方式的人机协调型机器人的概要结构例。
17.图2是从不同的角度观察图1的机器人的图。
18.图3是表示本发明的第二实施方式的人机协调型机器人的概要结构例。
19.图4是表示本发明的第三实施方式的人机协调型机器人的概要结构例。
具体实施方式
20.图1是表示本发明的第一实施方式的人机协调型机器人(机构部)10的概要结构例。机器人10是与人共享作业空间而进行工作的例如垂直多关节型机器人,具有:基部(j1基座)12、设于基部12上且能够绕第一轴线(j1轴)14旋转的回旋体(j2基座)16、设于回旋体16上且能够绕第二轴线(j2轴)18旋转的上臂(j2臂)20、设于上臂20的前端且能够绕第三轴线(j3轴)22旋转的前臂(j3臂)24。
21.在机器人10中,j2基座绕j1轴进行回旋,j2轴及j3轴旋转而改变各臂的姿势,由此使机器人10的前端位置能够移动、控制。图示例中,j2轴和j3轴是平行的旋转轴。另外,在j3臂的前端还设置有腕轴(未图示),通过该腕轴还能够控制前端的姿势。
22.机器人10的动作能够通过连接于机器人10的机器人控制装置26而进行控制。另
外,如图1所示,判定部28及指令部30(或者它们的功能)能够通过控制装置26所具有的运算处理装置(cpu)等实现,也能够通过与控制装置26分开设置的个人计算机等的装置(未图示)实现。
23.如图1所示,机器人10具有安装于j1基座12的下方的传感器部32,这里的传感器部32具有检测力和力矩的力传感器(六轴力传感器)。以下,对第一实施方式的机器人10的功能及动作进行说明。
24.当人(作业人员)等的外力施加于机器人10时,力传递到力传感器32,力传感器32检测出这种情况。在检测出的外力超过预先决定的阈值的情况下,为了确保安全,机器人10停止(在大多情况下,立即停止)。这样,在人接触而对机器人10施加了规定值以上外力的情况下,通过机器人停止,来防止给人带来危害。
25.为了重新开始暂时停止的机器人10的动作,人(作业人员)故意地对机器人施加外力。在此,上述判定部28判定该外力是否为在预先决定的机器人10的规定部位基于预先决定的模式所施加的力,在判定为外力是在预先决定的机器人10的规定部位基于预先决定的模式所施加的力的情况下,指令部30使机器人10进行与该模式预先关联的动作(这里为重新开始动作)。
26.作为一例,在将机器人10的“规定部位”设为“回旋体或机器人臂(j2臂或j3臂)的侧面中、距力传感器(的上端)的高度在20cm以内的部位”,且将“预先决定的模式”设定为“连续两次拍击(例如0.5秒以内,或1秒以内的间隔)”的情况下,如果人执行“连续两次拍击回旋体或机器人臂侧面中、距力传感器的高度在20cm以内的部分”的动作,则将其判断为“重新开始机器人的动作”的命令,并执行该命令。据此,在人无意地接触机器人10而机器人10停止的情况下,通过人进行两次拍击距力传感器32的高度在20cm以内的侧面的简单的动作,能够重新开始机器人10的动作。
27.此外,如第一实施方式,在使用六轴力传感器作为传感器部的情况下,不能直接指定外力施加到机器人10的哪个位置,但能够通过以下计算求得。首先,如从后方(图1中左方)观察机器人10的图2所示,将3轴(x、y、z)的力(fx、fy、fz)投影到j2轴的旋转轴,得到沿j2轴方向的力f2。接着,根据3轴的力矩(mx、my、mz),得到绕j1轴矢量和j2轴矢量的外积矢量的力矩m2。在此,m2除以f2所得到的值(m2/f2)相当于力的作用点的高度,因此,能够指定(计算)外力的作用位置。此外,图2中,f2是与纸面平行且横向的力,m2是绕与纸面垂直的方向的力矩。
28.通过上述的处理,第一实施方式中,在对机器人10的规定部位以外的部位例如臂前端施加了力的情况下,不会将其错误地解释为命令。因此,只有在以规定的模式对规定部位施加外力的情况下,能够将其解释为规定的命令(例如动作重新开始命令)并使机器人进行动作。
29.图3是表示本发明的第二实施方式的人机协调型机器人(机构部)40的概要结构例。此外,第二实施方式中,仅说明与第一实施方式不同的部分,对于与第一实施方式相同的部分,标记相同的参考符号,并省略详细的说明。
30.第二实施方式中,传感器部具有能够检测接触位置的接触传感器42来代替六轴力传感器,机器人40由接触传感器42覆盖。通过接触传感器42的使用,能够检测人与机器人接触的情况及检测人接触了机器人的哪个部位,因此,能够直接判断人的接触部位是否相当
于上述的“规定部位”。
31.第二实施方式中,例如,“连续两次拍击机器人40的j3轴22的旋转轴部分”时,能够将其解释为“重新开始动作”的命令。在该情况下,人与机器人40接触,当机器人停止后,继续两次拍击机器人的j3轴的旋转轴部分,由此,能够重新开始机器人40的动作。因此,第二实施方式中,只有在以规定的模式对规定部位施加外力的情况下,能够将其解释为规定的命令(例如动作重新开始命令)而使机器人进行动作。
32.图4是表示本发明的第三实施方式的人机协调型机器人(机构部)50的概要结构例。此外,第三实施方式中,仅说明与第一实施方式不同的部分,对于与第一实施方式相同的部分,赋予相同的参考符号,并省略详细的说明。
33.第三实施方式中,代替六轴力传感器,传感器部具有分别设于机器人的多个轴(图示例中,j1~j3轴)且检测各轴的扭矩的扭矩传感器52、54及56。人与机器人50接触时,扭矩传感器52、54及56中的至少一个检测外力扭矩,机器人50的动作停止。
34.第三实施方式中,例如,“连续两次拍击机器人50的j2臂(上臂)20”时,能够将其解释为“重新开始动作”的命令。人拍击上臂20时,j2轴的扭矩传感器54检测外力,但j3轴的扭矩传感器56不检测外力。另一方面,拍击j3臂(前臂)24时,扭矩传感器54及56双方检测外力。这样,能够基于多个扭矩传感器的检测结果指定施加外力的部分,因此,该例子中,即使对前臂24施加外力,也不会将其错误地解释为命令。因此,第三实施方式中,只有以规定的模式对规定部位施加外力的情况下,能够将其解释为规定的命令(例如动作重新开始命令)而使机器人进行动作。
35.此外,规定部位不限于上述的情况,例如也可以设为“距力传感器(或机器人设置面等的基准面)的高度为50cm以上且70cm以下的机器人臂侧面”,能够将机器人的任意一部分设定为规定部位。特别是将通常的工作状况下难以作用外力的机器人的一部分设定为“规定部位”,由此,能够降低人无意地(错误地)使机器人动作的可能性。对于“模式”,也不限于“连续两次拍击”等,能够基于施加到机器人的外力的大小、方向、次数(在多次的情况下,进一步基于时间间隔等)中的至少一项设定,优选设定为在通常的工作状况下难以实现的(无意地执行的可能性低)模式。
36.另外,上述实施方式中,将以规定的模式对机器人的规定部位施加了外力的情况下进行的命令(命令)设为“(暂时停止的)动作重新开始”,但本发明不限于此。例如,也可以移动到机器人的规定的待机位置或初始位置,也可以进行其它的退避动作。另外,也能够准备多个规定的模式,根据模式进行不同的动作(例如,如果连续两次拍击,则重新开始动作,如果拍击三次,则向初始位置移动等)。
37.根据本发明,将对预先决定的机器人的规定部位进行动作模式判断为使机器人进行再起动等的规定的动作的命令,因此,能够忽视施加到除此以外的部分的动作模式。因此,人无意图时,能够大幅降低执行规定的动作的可能性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。