1.本技术涉及健美操体育运动器械,尤其涉及一种健美操肢体训练动作纠正装置。
背景技术:
2.健美操作为一种体能训练,能充分施展上下肢、躯干、头颈和足踩动作,特别是髋部动作,是集体操、舞蹈、音乐、健身、娱乐于一体的体育项目。
3.健美操幅度较大的基本动作从四肢动作上分解为躯、臂、腿上表现,具体分解包括腿部的抬腿、迈步、踢腿、跨步、曲腿、举腿,躯体的扭、弓、仰、侧弯,手臂的平举、上举、侧展、后展。健美操分为健身和表演经济两大类,无论是动作目的还是表演的观赏性上,都要求动作的标准规范性,即常说的要“到位”,亦即肢体动作要达到一定的角度,尤其是团体性的表演活动中,身高各不相同,动作协调主要依靠肢体动作的角度来展现,而不是动作的移动距离。
4.但作为训练者本身无法全空间充分体会到每个动作做到什么程度才能达到标准。目前多数是通过教练人员的口令纠正及室内训练场所的镜子自身观察来进行,无法形成完美的动作角度,训练者要经历无数次的反复练习才能接近要求,都属于定性练习,无法实现定量练习、而且这种模糊的训练又造成了每个人全屏自身感觉来做出动作,如果能实现定量练习,肢体的任何动作都能进行量化,逐渐形成肌肉记忆,会大大提高训练速度。
技术实现要素:
5.本技术提供了一种健美操肢体训练动作纠正装置,能够解决现有的器械无法实现健美操肢体动作定量训练的问题。
6.本技术的技术方案是一种健美操肢体训练动作纠正装置,包括:两个共面对称设置并且凸起部背向设置的圆弧形的滑轨和活动设置在每个所述滑轨内的两个定位件,以及与所述滑轨滑动连接并且设置在两个所述定位件之间的手滑件,以及设置在所述手滑件上的传感器,以及与所述传感器连接的控制器,以及设置在所述滑轨的顶侧并且与控制器连接的提示件;
7.所述滑轨被半径切割得到的截面中靠近圆心的一个边侧开设有穿孔,以及穿孔沿着滑轨延伸成滑道;
8.所述传感器用于获取所述手滑件与所述滑轨顶侧之间的距离信息并且传送距离信息至控制器;所述控制器根据距离信息得到所述手滑件与所述滑轨顶侧之间的圆心角信息;
9.以及,所述控制器还用于获取关于圆心角的角度命令并且根据角度命令和圆心角信息确定是否得到提示信息,如果得到提示信息,控制器传送提示信息至所述提示件,所述提示件根据提示信息发出提示。
10.可选地,所述滑轨内与半径的延伸方向平行的两个侧面成对开设有若干个滑孔;
11.以及,所述定位件包括:两个插入杆,以及弹簧和两个控制杆;
12.所述插入杆被构成为一端为可在所述滑孔内插入和抽出的插入圆柱并且另一端为半径的设置长度相较于插入圆柱的半径的设置长度更大的阻挡圆柱;
13.两个所述插入杆的圆心轴共心并且以阻挡圆柱一侧相对设置,以及所述弹簧设置在两个所述插入杆的阻挡圆柱之间;
14.所述控制杆的一端与阻挡圆柱靠近所述弹簧一侧的外周面连接,以及所述控制杆的另一端通过所述滑道延伸至所述滑轨外侧。
15.可选地,所述手滑件包括:提手和两个滚动体,以及固定壳;
16.所述提手被构成为设置形状为凹形,以及凹形的两个凸出侧设置在贯穿所述滑道后延伸至所述滑轨内并且连接两个凸出侧的连接侧位于所述滑轨的外侧;
17.所述滚动体包括:延伸方向垂直于两个滑轨所在的设置面的滚轴,以及设置在所述滚轴两端并且可围绕所述滚轴转动的转动件;
18.所述提手的每个凸出侧均与一个所述滚轴固定连接;
19.所述固定壳被构成为具有设置在两个滚动体相互远离的一侧的隔离板,以及还具有连接两个所述隔离板的连接板。
20.可选地,所述装置还包括:定位架;
21.两个所述滑轨的设置面垂直于地面并且两个所述滑轨位于所述定位架内;
22.以及,所述定位架包括:主要延伸面的设置方向垂直于地面的矩形的框体、与所述框体的顶侧活动连接并且与所述滑轨的顶侧固定连接的活动杆,以及连接所述框体的底侧和滑轨的底侧的两个连接杆;
23.所述连接杆的长度可调。
24.可选地,所述连接杆包括:x型伸缩机构、电动液压杆和承接端;
25.x型伸缩机构可在竖直方向上伸缩;
26.所述电动液压杆的液压缸与x型伸缩机构底端的一个端头连接,所述电动液压杆的电动液压杆与x型伸缩机构底端的另一个端头连接;
27.所述承接端设置在x型伸缩机构的顶端,用于与所述滑轨的底侧固定连接。
28.可选地,所述定位架还包括:设置在所述定位架底侧的底腔;
29.所述底腔内设置有双向螺纹杆和驱动器;
30.一个所述连接杆延伸至所述底腔内的部分开设有与所述双向螺纹杆的左旋螺纹配合使用的左旋螺纹腔,另一个所述连接杆延伸至所述底腔内的部分开设有与所述双向螺纹杆的右旋螺纹配合使用的右旋螺纹腔;
31.所述驱动器与双向螺纹杆的一个端头固定连接。
32.可选地,所述框体内沿着竖直方向设置的每个端侧均包括两个沿着竖直方向延伸的直杆,以及两个所述直杆之间连接有x状的固定杆;
33.以及,在所述框体的每个端侧内,所述固定杆的设置数量为两个。
34.可选地,所述定位架的设置数量为三个并且三个所述定位架平行设置,以及相邻两个所述定位架之间的连接方式为活动连接并且连接长度可调。
35.可选地,所述装置还包括:与所述控制器连接的操作端;
36.所述操作端用于获取与每个所述定位架相关的运动员的身材数据和关于肢体训练的目标指令,以及根据所述身材数据和目标指令,得到角度命令和时间命令,以及得到基
于运动员的高度命令和宽度命令,以及传送角度命令、时间命令高度命令和宽度命令至控制器;
37.所述控制器还用于根据圆心角信息和时间命令,判断运动员是否在时间命令对应的时间内完成相关肢体训练动作;
38.所述控制器还用于传送高度命令至所述电动液压杆,驱动所述电动液压杆调节x型伸缩机构底端的两个端头之间的距离,用于间接调节所述连接杆的长度;
39.所述控制器还用于传送宽度命令至所述驱动器,所述驱动器驱动所述双向螺纹杆转动,用于间接调节每个所述定位架内两个所述连接杆之间的距离。
40.可选地,所述底腔的顶端设置有刻度线。
41.有益效果:
42.本技术通过设置滑轨、定位件和手滑件,可以提供运动员用于训练的器械,以及可通过定位件与手滑件的配合,确定运动员活动的范围。
43.本技术还通过设置传感器、控制器和提示件,可以基于动作需要的角度命令帮助运动员完成动作纠正训练,以及在动作不合格的时候发出提示,便于运动员及时调整改正。
44.综上所述,本技术能够解决现有的器械无法实现健美操肢体动作定量训练的问题。
附图说明
45.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
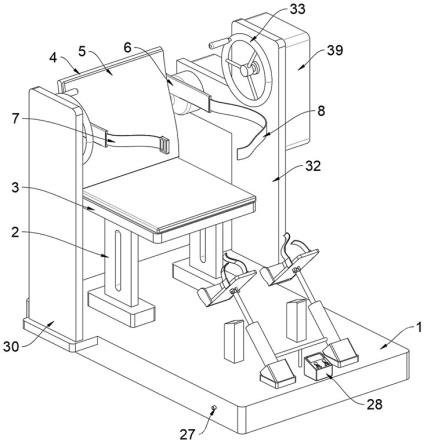
46.图1为本技术实施例中一种健美操肢体训练动作纠正装置的正视图;
47.图2为本技术实施例中一种健美操肢体训练动作纠正装置的侧视图;
48.图3为本技术实施例中定位件的结构示意图;
49.图4为本技术实施例中手滑件的结构示意图;
50.图5为图4中a-a向的剖视图;
51.图6为本技术实施例中连接杆的结构示意图;
52.图7为本技术实施例中底腔的结构示意图;
53.其中,1-滑轨;11-滑道;12-滑孔;2-定位件;21-插入杆;22-弹簧;23-控制杆;3-手滑件;31-提手;32-滚动体;321-滚轴;322-转动件;33-固定壳;331-隔离板;332-连接板;4-传感器;5-提示件;6-定位架;61-框体;611-直杆;612-固定杆;62-活动杆;63-连接杆;631-型伸缩机构;632-电动液压杆;633-承接端;64-底腔;641-双向螺纹杆;642-驱动器。
具体实施方式
54.下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本技术相一致的所有实施方式。仅是与权利要求书中所详述的、本技术的一些方面相一致的系统和方法的示例。
55.本技术提供了一种健美操肢体训练动作纠正装置,如图1和图2所示,图1为本技术
实施例中一种健美操肢体训练动作纠正装置的正视图,图2为本技术实施例中一种健美操肢体训练动作纠正装置的侧视图,包括:滑轨1、定位件2、手滑件3、传感器4、控制器、提示件5、定位架6和操作端。
56.两个圆弧形的滑轨1共面对称设置并且凸起部背向设置。滑轨1被半径切割得到的截面中靠近圆心的一个边侧开设有穿孔,以及穿孔沿着滑轨1延伸成滑道11。滑轨1内与半径的延伸方向平行的两个侧面成对开设有若干个滑孔12。
57.两个定位件2活动设置在每个滑轨1内。
58.如图3所示,图3为本技术实施例中定位件的结构示意图,定位件2包括:两个插入杆21,以及弹簧22和两个控制杆23。
59.插入杆21被构成为一端为可在滑孔12内插入和抽出的插入圆柱并且另一端为半径的设置长度相较于插入圆柱的半径的设置长度更大的阻挡圆柱。
60.两个插入杆21的圆心轴共心并且以阻挡圆柱一侧相对设置,以及弹簧22设置在两个插入杆21的阻挡圆柱之间。
61.控制杆23的一端与阻挡圆柱靠近弹簧22一侧的外周面连接,以及控制杆23的另一端通过滑道11延伸至滑轨1外侧。
62.手滑件3与滑轨1滑动连接并且设置在两个定位件2之间。两个定位件2可与滑轨1上的任意位置固定,当两个定位件2的相对位置固定后,手滑件3在滑轨1上的活动范围即固定。
63.手滑件3包括:提手31和两个滚动体32,以及固定壳33。
64.如图4和图5所示,图4为本技术实施例中手滑件的结构示意图,图5为图4中a-a向的剖视图,提手31被构成为设置形状为凹形,以及凹形的两个凸出侧设置在贯穿滑道11后延伸至滑轨1内并且连接两个凸出侧的连接侧位于滑轨1的外侧。
65.滚动体32包括:延伸方向垂直于两个滑轨1所在的设置面的滚轴321,以及设置在滚轴321两端并且可围绕滚轴321转动的转动件322。
66.具体地,转动件322为可转动的物件即可,可根据实际确定。
67.提手31的每个凸出侧均与一个滚轴321固定连接。
68.固定壳33被构成为具有设置在两个滚动体32相互远离的一侧的隔离板331,以及还具有连接两个隔离板331的连接板332。
69.具体地,运动员可站在两个滑轨1之间,然后双手分别握持提手31,然后进行动作训练。提手31的活动范围为两个定位件2之间。
70.传感器4设置在手滑件3上。传感器4用于获取手滑件3与滑轨1顶侧之间的距离信息并且传送距离信息至控制器。
71.控制器与传感器4连接。控制器根据距离信息得到手滑件3与滑轨1顶侧之间的圆心角信息。
72.提示件5设置在滑轨1的顶侧并且与控制器连接。
73.控制器还用于获取关于圆心角的角度命令并且根据角度命令和圆心角信息确定是否得到提示信息,如果得到提示信息,控制器传送提示信息至提示件5,提示件5根据提示信息发出提示。
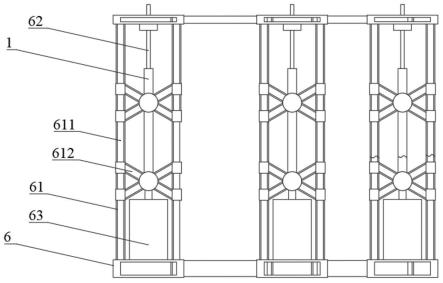
74.定位架6包括:框体61、活动杆62、连接杆63和底腔64。
75.矩形的框体61的主要延伸面的设置方向垂直于地面,两个滑轨1的设置面垂直于地面并且两个滑轨1位于框体61内。
76.框体61内沿着竖直方向设置的每个端侧均包括两个沿着竖直方向延伸的直杆611,以及两个直杆611之间连接有x状的固定杆612。在框体61的每个端侧内,固定杆612的设置数量为两个。
77.活动杆62与框体61的顶侧活动连接并且与滑轨1的顶侧固定连接。
78.两个连接杆63用于连接框体61的底侧和滑轨1的底侧。连接杆63的长度可调并且两个连接杆63之间的距离可调。
79.连接杆63包括:x型伸缩机构631、电动液压杆632和承接端633。
80.如图6所示,图6为本技术实施例中连接杆的结构示意图,x型伸缩机构631可在竖直方向上伸缩。
81.电动液压杆632的液压缸与x型伸缩机构631底端的一个端头连接,电动液压杆632的电动液压杆与x型伸缩机构631底端的另一个端头连接。
82.承接端633设置在x型伸缩机构631的顶端,用于与滑轨1的底侧固定连接。
83.底腔64设置在定位架6的底侧。底腔64的顶端设置有刻度线。运动员可参考刻度线确定站位等其他动作是否标准。
84.如图7所示,图7为本技术实施例中底腔的结构示意图,底腔64内设置有双向螺纹杆641和驱动器642。
85.一个连接杆63延伸至底腔64内的部分开设有与双向螺纹杆641的左旋螺纹配合使用的左旋螺纹腔,另一个连接杆63延伸至底腔64内的部分开设有与双向螺纹杆641的右旋螺纹配合使用的右旋螺纹腔。
86.驱动器642与双向螺纹杆641的一个端头固定连接。
87.在一些实施例中,定位架6的设置数量为三个并且三个定位架6平行设置,以及相邻两个定位架6之间的连接方式为活动连接并且连接长度可调。
88.操作端与控制器连接。
89.操作端用于获取与每个定位架6相关的运动员的身材数据和关于肢体训练的目标指令,以及根据身材数据和目标指令,得到角度命令和时间命令,以及得到基于运动员的高度命令和宽度命令,以及传送角度命令、时间命令、高度命令和宽度命令至控制器。
90.具体地,操作端预存有肢体训练动作信息。肢体训练动作信息包括:运动员需要执行的连续动作、片段动作和整合动作,以及片段动作的角度、高度和每个连续动作中相邻片段动作之间的间隔时间。
91.其中,连续动作可被拆分成若干个片段动作,片段动作为基本动作单位,但是在实际训练过程中,随着熟练度的增加,在后期训练过程中可能不再需要对片段动作进行纠正训练,因此设计整合动作。整合动作是由连续动作被分割得到的,但是整合动作至少包括两个片段动作,可根据需要自由选择。
92.以及,操作端中的每个片段动作的起止位置的圆心角和完成时间均可自由设置。
93.在整合动作中,可选择对整合动作中每个片段动作的起止位置的圆心角和完成时间进行设置,也可选择对整合动作这个整体完整的动作的起止位置的圆心角和完成时间进行设置。整合动作的最大范围即连续动作。
94.在实际使用中,可连续设置若干个连续动作。
95.身材数据包括:身高、腰围和臂长等可影响肢体训练动作的数据。
96.目标指令包括:连续动作的数量和种类、是否对连续动作进行分割或者拆分,以及分割得到的整合动作中每个片段动作的起止位置的圆心角和完成时间或者分割得到的整合动作的起止位置的圆心角和完成时间,以及拆分得到的片段动作的起止位置的圆心角和完成时间。
97.上述包括身材数据和目标指令在内的信息均可预存在操作端中,即可预存输入进行存储,也可现场输入或者更改预存输入,用于得到当次动作纠正所需要的数据。
98.控制器还用于传送高度命令至电动液压杆632,驱动电动液压杆632调节x型伸缩机构631底端的两个端头之间的距离,用于间接调节连接杆63的长度。
99.控制器还用于传送宽度命令至驱动器642,驱动器642驱动双向螺纹杆641转动,用于间接调节每个定位架6内两个连接杆63之间的距离。
100.具体地,因为一般情况下,不同的运动员具有不同的身材数据,因此在完成相同动作的时候,所需要滑轨1距离地面的距离和所需要两个滑轨1之间的距离是不同的,因此需要根据运动员的身材数据确定该运动员完成动作纠正训练的起始位置的滑轨1距离地面的距离和所需要两个滑轨1之间的距离。其中,上述距离的调节通过连接杆63完成。
101.工作原理:
102.(一)当需要对一个运动员的动作进行纠正:
103.首先在操作端确认运动员所在的定位架6的位置,然后输入运动员的包括身高、腰围和臂长等身材数据,以及输入运动员的目标指令。
104.操作端根据身材数据和目标指令,得到相应于运动员的整合动作的起止位置的圆心角和完成时机或者片段动作的起止位置的圆心角和完成时间,以及得到相应于运动员在进行相关动作训练前所需要连接杆63的高度和两个连接杆63之间的距离。
105.其中,起止位置的圆心角圆心角信息,以及完成时间为时间命令。
106.操作端发送圆心角信息、时间命令、高度命令和宽度命令至控制器,控制器传送高度命令至电动液压杆632,驱动电动液压杆632调节x型伸缩机构631底端的两个端头之间的距离,间接调节x型伸缩机构631在竖直方向上的伸缩长度,用于间接调节连接杆63的长度。
107.控制器传送宽度命令至驱动器642,驱动器642驱动双向螺纹杆641转动,用于间接调节每个定位架6内两个连接杆63之间的距离。
108.当基于运动员的高度和宽度都设置完毕后,运动员可开始训练。
109.运动员可根据在操作端输入的目标指令完成相关的动作。由于传感器4的设置,所以控制器可得到运动员起止位置的实际圆心角。控制器根据实际圆心角和圆心角信息,以及运动员完成起止动作所经历的实际时间和时间命令,判断运动员的动作是否标准,如果实际圆心角和实际时间不符合圆心角信息和时间命令,控制器生成提示信息并且传送提示信息至提示件5,提示件5根据提示信息进行声音或者亮灯的提示。
110.(二)当需要对若干个运动员的动作进行纠正:
111.首先在操作端确认若干个运动员所在的定位架6的位置,然后对应定位架6输入运动员的身材数据和目标指令。
112.在实际操作中,可选择若干个运动员执行一套目标指令,也可选择每个运动员各
执行一套目标指令。
113.在实际操作中,控制器的判断过程是基于定位架6进行,因此相邻的定位架6的训练过程互不干扰。
114.以上对本技术的实施例进行了详细说明,但内容仅为本技术的较佳实施例,不能被认为用于限定本技术的实施范围。凡依本技术范围所作的均等变化与改进等,均应仍属于本技术的专利涵盖范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。