1.本发明涉及水下仿生浮游微型机器人,具体为一种采用仿鱼鳍摆动行进能够实现自主转向的仿生浮游微型机器人,可用于水下吸附到目标物体。
背景技术:
2.众所周知,覆盖地球表面积71%的海洋蕴藏着极为丰富的资源,包括生物资源、矿产资源和能源资源等。随着海洋资源开发的深入与海洋能源利用技术的发展,水下机器人可以辅助人类在无法到达的深度和广度上进行探索,解决人类在水下作业时能见度低、效率低下以及工作强度高等问题,同时,水下机器人可应用于军事中,如水下探测、水下爆破、水下救生等,具有重要的战略意义。由于传统的水下机器人存在水下推进效率低,噪声大等问题,并且随着水下作业需求的增加,对水下机器人的功能及特性需求也更加多元化,受到水下生物的启发,将水下生物的运动机理应用到水下机器人中,可以使得机器人机动性更强、具备更高的推进效率。
3.鱼类的运动方式主要有bcf和mpf两种,相较于鱼鳍的摆动,喷水推进是水下生物采用的另一种重要推进方式,水母作为浮游生物的典型代表,同时作为间歇式喷水推进的代表性生物,其体积小、重量轻、具备高柔性的特点吸引了学者们的广泛关注。同时,仿生机器水母内部空间较大,相较于其他水下机器人可以搭载更多的传感设备和任务模块,在军事方面中能够实现噪声小、隐蔽性更强的目的。
4.现有的仿生水母机器人大多采用喷射推进的水下行进方式,然而采用喷射推进的方式的水下机器人为了保证较高的水下行进效率,其钟状体结构需要有较大的收缩和舒张幅度,否则会极大的降低机器人的推进速度,增加推进消耗的功率,而微小型机器人受到整体尺寸的限制,其弹性膜的安装空间相对有限,通过布装较大面积的弹性膜实现大幅度的收扩运动是很困难的,针对这一问题,已经有学者为仿水母机器人设计了仿鱼鳍推进、螺旋桨推进等其他推进模式,青岛科学艺术研究院刘帅等人设计了一种环罩配有4条扑水柔性片的仿生水母机器人,在给定的介质流体系数下该机器人可以有着较好的机构协调能力。哈尔滨工程大学孙浩迪等人采用螺旋桨和波动推进的方式提出了一种复合推进仿水母机器人,此推进方式推进操作更为灵活,效率更高,能实现长时间的水下作业任务。苏州科技学院谢欧等人应用多尾鳍驱动的方式设计了一种仿生推进器,机器人可以在尾鳍协调作用下完成波动推进、制动、转向等动作,相较于射流推进的方式可以提供更稳定均匀的推进力。
5.本发明受水母等水下生物的启发,采用仿鱼鳍摆动的水下推进形式,设计了一款新型的微小型水下仿水母机器人,机器人能够实现在水下的高速游动以及自主转向,同时适应性地吸附在目标表面,具有较好的应用前景。
技术实现要素:
6.本发明的目的在于提出一种采用仿鱼鳍摆动推进的微小型仿水母机器人,机器人
可以自主调整水下航向并吸附于目标物体表面。
7.本发明的目的是这样实现的:至少包括一个吸附模块,一个二级推进模块和一个矢量行进模块。
8.所述吸附模块包括吸附盖、外壳、上方的测距传感器、自适应吸附装置、蓄能弹簧、保持弹簧、电磁铁、驱动齿条、齿轮、外侧齿条和下滑台。所述测距传感器通过传感器支撑架和盖板固定在吸附模块上方,从而检测机器人距离目标物体的距离。所述驱动齿条通过螺钉连接在自适应吸附单元底部,随自适应吸附装置在套筒内完成上下运动,蓄能弹簧自由端布放在齿条连接架的下方,作为驱动齿条向上运动的动力源。所述电磁铁分别安装在齿条连接架下方与左右两瓣壳体上,通过电磁铁与磁片的吸附关系保持蓄能弹簧的压缩状态与壳体的紧闭状态。所述齿轮通过销轴和轴用卡簧固定在齿轮支撑架上,通过齿轮齿条的啮合关系保证驱动齿条向上运动的同时带动外侧齿条沿两侧滑杆向下运动。所述保持弹簧安装在外侧齿条与壳体之间,保证齿条下降的同时带动壳体沿下滑台斜面下滑。
9.所述二级推进模块包括两个弹簧杆、一个升降推杆、四组扇叶摆动机构和一个电机离合器驱动装置。所述扇叶摆动机构包括驱动圆盘、第一连杆、第二连杆,驱动圆盘安装有四个滑动轴承,使其能够沿滑杆上下运动,第一连杆的一端通过销轴和轴用卡簧连接在圆盘下铰链上,另一端通过销轴和轴用卡簧与摆动扇叶相连,第二连杆通过销轴和轴用卡簧的连接方式的一端连接在第一连杆的中部位置,另一端连接在舱盖上铰链上,该机构可以实现驱动圆盘上下运动带动扇叶的上下摆动。所述电机离合器驱动装置通过螺钉安装在驱动舱室内部,装置输出端所缠绕钢丝绳的自由端连接到升降推杆的下方从而对其进行驱动,升降推杆的一端加工有螺纹,通过两个缩紧螺母和两个止退垫圈将驱动圆盘固定在推杆上方。所述弹簧杆的安装座通过螺钉固定在舱盖的上方和驱动圆盘的下方,在驱动圆盘上下运动的同时,带动弹簧的拉伸与压缩,扇叶的上摆过程通过电机离合器装置驱动升降推杆向下运动实现,扇叶的下摆过程通过两侧弹簧杆弹簧复位过程来实现。
10.所述矢量行进模块包括单轴防水舵机、双轴防水舵机、舵盘连接轴、舵机安装臂、舵盘回转板和尾部舵板。所述单轴防水舵机固定在舵机安装架上并通过螺钉安装在控制舱室的底部,双轴防水舵机在舵机安装臂内部,舵机的前后两侧采用盖板进行固定,盖板与安装臂采用螺钉进行连接。所述舵盘连接轴通过螺钉连接在单轴舵机舵盘上,输出轴上方开有键槽用于传递舵机的输出力矩控制舵机安装臂的前后摆动,进而控制尾部舵板的摆动。所述尾部舵板通过螺钉连接在舵盘回转板的底部,舵盘回转板安装在双轴舵机的输出舵盘上,通过双轴舵机控制尾部舵板的左右摆动。
11.本发明还可以包括:
12.1.所述自适应吸附装置包括磁力环、磁力环安装座、两个半圆形压板和弧面底座。磁力环与磁力环安装座采用螺钉进行连接,磁力环安装座的下方加工成弧面使其与弧面底座实现球面接触,并在上方采用两个半圆形压板进行压紧,实现磁力环的自适应吸附功能。
13.2.所述电机离合器驱动单元包括直流减速电机,谐波减速器,传动齿轮(传动比1:1),电磁离合器、滑轮。直流减速电机的输出轴连接在谐波减速器的输入端,减速器输出轴通过传动齿轮带动电磁离合器和滑轮的转动,滑轮的内部设计有卡槽,用于与电磁离合器的连接。
14.3.所述摆动扇叶的上方设计有扇叶合页的结构,扇叶合页与扇叶通过长销轴与轴
磁力环安装座、4-弧面底座、5-驱动齿条、6-齿轮、7-外侧齿条、8-下滑台、9-外壳、10-滑杆、11-保持弹簧、12-套筒、13-半圆压板、14-传感器支撑架、15-测距传感器、16-弹簧杆、17第一连杆、18-第二连杆、19-舱盖、20-驱动舱室、21-摆动扇叶、22-法兰型直线轴承、23-升降推杆、24-滑杆、25-驱动圆盘、26-控制舱室、27-舵机安装臂、28-压板、29-舵盘回转板、30-尾部舵板、31-双轴防水舵机、32-单轴防水舵机、33-舵盘输出轴、34-直流减速电机、35-谐波减速器、36-传动齿轮(传动比1:1)、37-电磁离合器、38-滑轮、39-扇叶合页、40-电磁铁、41-磁块、42-蓄能弹簧、43-连接磁块。
具体实施方式
30.下面结合附图与具体实施方式对本发明作进一步详细描述。
31.本发明包括吸附模块、二级推进模块和矢量行进模块。
32.所述吸附模块包括吸附盖、外壳、测距传感器、自适应吸附装置、蓄能弹簧、保持弹簧、电磁铁、驱动齿条、齿轮、外侧齿条和下滑台。所述吸附盖安装在机器人顶部,采用两侧外壳对其进行夹持固定,吸附盖上表面加工成弧形,能够减小机器人行进过程受到的阻力。所述测距传感器通过传感器支撑架和盖板固定在吸附模块上方,用于检测机器人与目标物体的距离。所述自适应吸附装置能够在套筒内升降运动,蓄能弹簧的自由端布放在齿条连接架的下方,作为吸附装置弹出的动力源。所述驱动齿条通过螺钉固定在自适应吸附装置的下方,通过轮齿之间的啮合,驱动齿条的上升将带动外侧齿条的向下运动,保持弹簧布放在外壳与外侧齿条的凹槽中,使得外侧齿条向下运动的同时外壳沿下滑台斜面下滑,为吸附装置的弹出留有空间。所述电磁铁安装在壳体处与齿条连接架下方,用于吸附装置弹出前保持蓄能弹簧的压缩状态与壳体的紧闭状态。
33.所述二级推进模块包括两个弹簧杆、一个升降推杆、四组扇叶摆动机构和一个电机离合器驱动单元。所述扇叶摆动机构包括驱动圆盘、第一连杆、第二连杆和摆动扇叶,连杆与固定铰链、连杆与扇叶之间通过销轴和轴用卡簧相连,驱动圆盘上方安装四个直线滑动轴承使其能够沿导杆上下运动并带动扇叶的上下摆动。所述电机离合器驱动单元通过螺钉安装在驱动舱室内部,驱动单元输出端卷绕的钢丝绳自由端固定在升降推杆的下方,升降推杆的上端通过螺母和止退垫圈固定在驱动圆盘上,通过电机离合器装置驱动驱动圆盘的下降运动。所述弹簧杆的安装座通过螺钉固定在舱盖与驱动圆盘之间,作为圆盘回升运动的动力源。
34.所述矢量行进模块包括单轴防水舵机、双轴防水舵机、舵盘连接轴、舵机安装臂、舵盘回转板和尾部舵板。所述单轴防水舵机固定在舵机安装架上并通过螺钉安装在控制舱室的底部,通过舵盘输出轴控制舵机安装臂和尾部舵板的前后摆动。所述双轴防水舵机安装在舵机安装臂的内部,其前后两侧采用盖板进行固定,舵盘回转板安装在双轴舵机的输出舵盘上,通过双轴舵机控制尾部舵板的左右摆动。
35.所述自适应吸附装置包括磁力环、磁力环安装座、两个半圆形压板和弧面底座。磁力环与磁力环安装座采用螺钉进行连接,磁力环安装座的下方加工成弧面与弧面底座形成球面接触,应用两个半圆形压板对其轴向进行固定,吸附装置能够实现10
°
左右的偏摆,具备自适应吸附的功能。
36.所述电机离合器驱动装置包括直流减速电机,谐波减速器,传动齿轮(传动比1:
1),电磁离合器和滑轮。直流减速电机的输出轴连接在谐波减速器的输入端,谐波减速器的柔轮输出轴经过传动齿轮驱动电磁离合器和滑轮的转动,滑轮的内部设计有卡槽,用于与电磁离合器的连接,滑轮上缠绕有钢丝绳连接在升降推杆的下方。
37.所述摆动扇叶的扇叶表面设计有合页结构,扇叶合页与扇叶采用长销轴与轴用卡簧连接,扇叶上摆过程合页打开,减小扇叶摆动受到水的阻力,扇叶下摆过程合页关闭,增加扇叶的排水面积进而增加扇叶摆动提供的推进力,扇叶的下表面设计有限位块,从而控制合页张开的最大角度。
38.所述驱动舱室与舱盖、控制舱室之间均采用8组螺栓螺母进行连接,驱动舱室底部与舱盖底部设计有凸台,用于舱室之间的装配,凸台上方装有o型轴用密封圈,实现舱室的密封。升降推杆可在驱动舱室内部升降运动,其出口端采用斯特封密封圈进行密封,斯特封密封圈安装座通过螺钉固定在舱盖的顶部,其上方安装有法兰型直线轴承保证升降推杆上下运动顺利进行。
39.下面结合附图对本发明进行进一步描述:
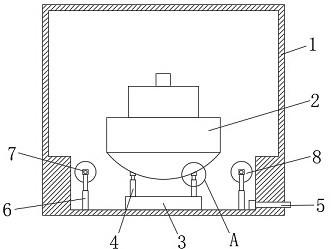
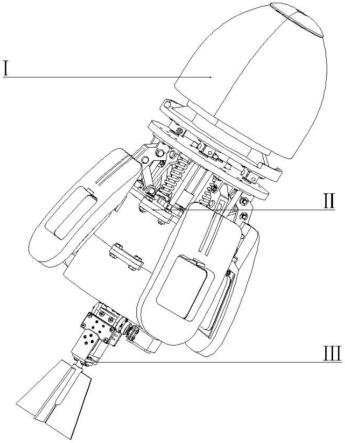
40.如图1所示,本发明中水下仿生浮游微型机器人由吸附模块ⅰ、二级推进模块ⅱ和矢量行进模块ⅲ组成。工作时,中部二级推进模块的四组摆动扇叶进行周期性地摆动,从而产生推进力使得机器人保持较高的游动速度,同时,矢量行进模块的两个舵机控制尾部舵板的偏摆角度以调整机器人的水下航向,增加机器人的机动性,待机器人靠近目标物体,测距传感器检测到信号吸附模块内部的吸附装置弹出,使得机器人牢牢吸附在目标表面上。
41.如图2所示,吸附模块由吸附盖1、磁力环2、磁力环安装座3、弧面底座4、驱动齿条5、齿轮6、外侧齿条7、下滑台8、外壳9、测距传感器15等构件组成。吸附盖1放在套筒12的顶部,在测距传感器15未检测到信号时利用外壳9将其夹持固定,磁力环2通过螺钉固定在磁力环安装座3上,磁力环安装座3的底面加工成球面,与弧面底座4上表面形成球面接触,通过两个半圆压板13将其压紧,使得吸附装置可以实现10
°
左右的自适应调节角度。驱动齿条5通过螺钉固定在弧面底座下部,通过齿轮齿条的啮合关系,驱动齿条5上升的同时通过齿轮6带动外侧齿条7向下运动,外侧齿条7设计有凹槽与外壳9的凸台配合,内部安装有保持弹簧11,使得外侧齿条7向下运动的同时两侧外壳9能够沿下滑台8斜面下滑,为吸附装置的弹出留有空间。如图7和图8所示为电磁铁40和磁块的布放位置,蓄能弹簧42作为吸附装置弹出的动力源,测距传感器15检测到信号前电磁铁处于吸合状态保证外壳9的紧闭与蓄能弹簧42的压缩状态,待测距传感器检测到信号,电磁铁磁性消失,在蓄能弹簧42恢复力的作用下,吸附装置得以弹出。
42.如图3所示,中部二级推进模块由第一连杆17、第二连杆18、驱动舱室20、摆动扇叶21、升降推杆23、驱动圆盘25等构件组成。第一连杆17、第二连杆18与固定铰链之间采用销轴和轴用卡簧进行连接,第一连杆17与摆动扇叶21之间采用两组销轴和轴用卡簧进行固定,驱动圆盘25连接有4个滑动直线轴承,保证其顺利沿滑杆24升降运动,通过驱动圆盘25的升降运动带动扇叶21的收扩运动。弹簧杆16通过弹簧杆支承座安装在驱动圆盘与舱盖19之间,当驱动圆盘25位于最上方时弹簧杆16的弹簧处于原长,当驱动圆盘25向下运动时,弹簧被逐渐压缩,其恢复力作为驱动圆盘25回升的动力源。如图5所示为驱动舱室的内部结构,由直流减速电机34、谐波减速器35、传动齿轮36(传动比1:1)、电磁离合器37、滑轮38组成,谐波减速器35接在直流减速电机34的输出轴上起到降速和增大力矩的作用,其柔轮输
出轴通过传动齿轮36驱动离合器滑轮转动。滑轮38的上方绕有钢丝绳,其自由端连接在升降推杆23的下方,升降推杆23的上端通过螺母与止退垫圈与驱动圆盘进行固定。如图6所示为摆动扇叶21上表面合页结构的设计,扇叶合页39通过长销轴和轴用卡簧安装在摆动扇叶21下表面,可绕长销轴回转完成开合动作,并通过限位块限制其最大开合角度。当电磁离合器37接合时,电机离合器单元带动驱动圆盘25向下运动,摆动扇叶21上摆,扇叶合页39打开,从而减小扇叶摆动过程受到水的阻力;当电磁离合器37断开时,电机处于空转状态,驱动圆盘25在弹簧杆16的作用下向上回升带动摆动扇叶21快速下摆,扇叶合页39紧闭,从而增大扇叶的排水面积。
43.如图4所示,下部矢量行进模块由控制舱室26、舵机安装臂27、舵盘回转板29、尾部舵板30、双轴防水舵机31、单轴防水舵机33等组成。控制舱室26主要用于电源和控制器等元件的布放,其与驱动舱室20之间采用六角螺栓与螺母连接,内部安装有o型密封圈,实现舱室的水下密封。单轴防水舵机33通过舵机支撑架固定在控制舱室的底部,舵盘输出轴33连接在单轴防水舵机的输出端,舵机安装臂27通过输出轴连接块连接在舵盘输出轴33上,通过单轴防水舵机33控制舵机安装臂27与尾部舵板30的前后摆动。尾部舵板30通过螺栓螺母连接在舵盘回转板29的底部,舵盘回转板29的两端固定在双轴防水舵机31的输出舵盘上,双轴防水舵机31安装在舵机安装臂27的内部,并在前后用压板28进行固定,通过控制双轴舵机的摆动角度实现尾部舵板的左右摆动。
44.当微小型机器人从uuv弹射装置弹射出后,机器人的二级推进模块与矢量行进模块开始作用。离合器37开始处于接合状态,图5所示的电机离合器驱动单元驱动滑轮38卷绕钢丝绳,带动驱动圆盘25缓慢向下运动并压缩弹簧杆,待驱动圆盘25下降到极限位置,离合器断开,电机处于空载状态,在弹簧恢复力的作用下,驱动圆盘25快速向上运动并带动扇叶21快速下摆,实现“快缩慢扩”的动作周期,使得机器人能够保持较高的游动速度。通过对扇叶上下摆动角度的限制,引入驱动方式切换的缓冲和停歇过程,可将离合器的通断周期设置为2s,即以周期2s的频率对电磁离合器37进行有规律1s通电、1s断电的控制。机器人的矢量行进装置能够自行调整机器人的姿态,通过单轴防水舵机33与双轴防水舵机31控制尾部舵板的前后摆动和左右摆动,是的机器人整体受到力矩的作用,实现水下转向,从而控制机器人的水下行进方向,提高了机器人的机动性。
45.当机器人靠近目标物体后,机器人头部的测距传感器15检测到信号,电磁铁磁性消失,机器人吸附模块内部的吸附装置弹出的同时带动机器人头部的壳体张开,并将上方吸附盖撑开,从而为吸附装置的露出留有空间,吸附装置可以实现10
°
范围内的偏摆,使得吸附模块能自适应地吸附到目标表面,实现吸附角度的微调,从而保证吸附的成功性。
46.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
47.综上,本发明提供了一种仿鱼鳍摆动行进能够实现自主转向的水下仿生浮游微型机器人,可用于水下吸附于目标物体。机器人包括吸附模块、二级推进模块和矢量行进模块,二级推进模块利用四组扇叶收拢舒展的方式产生持续的推进力,扇叶摆动遵循“快缩慢扩”的动作周期,扇叶合页结构的设计可减小扇叶摆动受到的阻力并增加其推进力,从而保证机器人较高的游动速度。矢量行进模块应用两个防水舵机控制尾部舵板的前后摆动和左
右摆动,使得机器人整体受到力矩的作用,实现水下航行姿态的调整,从而有效规避水中障碍提高机器人机动性。当机器人靠近目标物体,上方测距传感器检测到信号,吸附模块内部的吸附装置弹出,机器人自适应地吸附在目标物体表面。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。