本发明涉及水下观测设备,具体讲是涉及一种柔性仿生鱿鱼水下观测平台,属于水下观测技术领域。
背景技术:
水下机器人的研究试验需求随着社会市场和科学研究的规模增加而提高。对初步设计完成的大中型水下机器人和装备的测试逐步由试验水池提高到真实水域,而初期设备的不稳定性以及真实水域下设备实时状况的掌握无疑要依赖于高效、准确、连续的现场观测技术。对试验装备观测的同时,还能对试验水域的实际水文条件进行测量记录。传统水下观测平台为满足观测需求以及操作和运输的限制,结构设计紧凑,载重和携带设备数量有限,功能单一。独立的auv跟踪拍摄技术容易受水文条件影响,跟踪需人工手控,操作难度大,拍摄效果不理想;尽管didson双频识别声纳可以很好的解决上述问题,但设备成本高,且识别记录角度单一,后续数据处理繁琐。而研发水下装备的投入成本通常都较高,而设备在真实水域中状况的不确定性,观测设备缺乏安全保障的同时,水下探测的难度导致海洋装备测试情况不能清晰地记录。可见,由于传统水下观测平台的局限性,以及水下装备在真实水域观测提出了更高要求,限制了其在水下装备性能观测,海洋科学考察等更广泛场景的应用。
技术实现要素:
基于此,有必要针对上述技术问题,提供一种可用于深海,也可用于浅海的柔性仿生鱿鱼水下观测平台。该平台可以满足多种水下机器人性能测试记录需要。实现一个平台可以满足各种水深的水下机器人测试记录和周围水温条件记录的目标。该平台可对深海也可用于浅海水下机器人测试中为各种现场实时测量传感器/仪器提供安放支持的平台,以简化对不同水深海底长期观测设备的技术应用。本发明是由以下技术方案完成的:柔性仿生鱿鱼水下观测平台,该平台包括传感器集成机构、模块框架机构、机器人承载机构、平台支撑机构,所述传感器集成机构包括玻璃钢浮球、集成金属层,所述模块框架机构包括模块金属层、信号线盒,所述机器人承载机构包括承载金属层,所述平台支撑机构包括长支撑架、短支撑架、螺纹紧固件、支撑架固定件,所述传感器集成机构与所述平台支撑机构采用轴孔间隙配合,所述传感器集成机构与固定结构通过螺纹紧固件配合连接,所述模块框架机构与所述平台支撑机构采用轴孔间隙配合,所述模块框架机构与平台支撑机构通过螺纹紧固件配合连接,所述机器人承载机构与所述平台支撑机构采用轴孔间隙配合,所述机器人承载机构与固定结构通过螺纹紧固件配合连接。优选地,所述传感器集成机构的四个顶角内侧开槽倒圆角,用以配合钢缆固定吊装,所述集成金属层与所述短支撑架采用轴孔间隙配合,所述集成金属层与固定结构通过螺纹紧固件配合连接,所述集成金属层在中央方形开槽用以配合所述模块框架机构的信号
线盒走线,所述集成金属层内部多个对称开槽用以装配所述玻璃钢浮球,所述集成金属层内部对称开槽外围设有圆形通孔,所述玻璃钢浮球外侧设有圆形通孔,所述集成金属层与所述玻璃钢浮球通过螺纹紧固件配合连接。优选地,所述模块框架机构的四个顶角内侧开槽倒圆角,用以配合钢缆固定吊装,所述模块金属层与所述短支撑架,长支撑架采用轴孔间隙配合,所述模块金属层与固定结构通过螺纹紧固件配合连接,所述集成金属层内部方形开槽用外接设备调整位置,所述信号线盒四周开孔用以摄像头及灯光照明走线布置,底部开口用以机器人数据传输线连接布置。优选地,所述机器人承载机构与所述长支撑架采用轴孔间隙配合,所述承载金属层与固定结构通过螺纹紧固件配合连接,所述机器人承载机构触底面分布加强筋,所述承载金属层内部方形开槽用于外接设备调整位置。优选地,所述平台支撑机构的长支撑架上端两处凸起与模块金属层开槽采用轴孔间隙配合,长支撑架的下端两处开槽与承载金属层两处凸起采用轴孔间隙配合,所述短支撑架上端两处凸起与集成金属层开槽采用轴孔间隙配合,短支撑架下端两处开槽与模块金属层两处凸起采用轴孔间隙配合,所述支撑架固定件与长短支撑架采用轴孔间隙配合,并通过螺纹紧固件配合连接,所述长支撑架内侧承载环与机器人固定卡扣相连接定位。优选地,所述传感器集成机构,模块框架机构与短支撑架采用轴孔间隙配合,并通过螺纹紧固件配合连接,独立组成集成系统使用。优选地,所述模块框架机构,模块框架机构与短支撑架采用轴孔间隙配合,并通过螺纹紧固件配合连接,独立组成集成系统使用。优选地,所述机器人承载机构与长支撑架、模块框架机构、m20
×
70螺栓,m20螺母紧固配合成一级简易观测平台。优选地,所述机器人承载机构可与长支撑架、传感器集成机构、m20
×
70螺栓,m20螺母紧固配合成二级简易观测平台。优选地,所述集成金属层、模块金属层、信号线盒、承载金属层、长支撑架、短支撑架均由轻质防腐合金材料制成。有益效果:本技术的观测平台可以在很短的时间内采用常规的手工安装工具,即可完成设备的装配,使得海底调查研究工作中,只需一套水下记录观测设备即可满足浅海或深海机器人性能测试应用。单元整体开放形的模块框架由耐腐蚀且密度比不锈钢小的钛金属焊接而成。这样,在保证足够机械强度的前提下,减小了设备的整体重量。由于平台整体采用开放式的模块框架结构,使其在海水中形成等压平衡状态,所以本柔性仿生鱿鱼水下观测平台应用水深范围大。模块化设计的金属层可通过组合连接件组,快速组合成不同的柔性仿生鱿鱼水下观测平台结构,使一套平台主体结构可满足不同的实际应用需求。因此,节约了设备制作成本,提高了设备的使用效率,丰富了现代海洋调查技术的手段。
附图说明
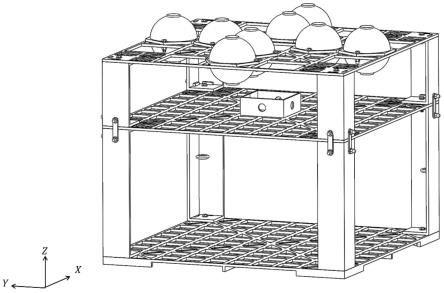
图1为本发明的柔性仿生鱿鱼水下观测平台的正等轴测结构示意图。图2为本发明的柔性仿生鱿鱼水下观测平台的主视图。图3为本发明的柔性仿生鱿鱼水下观测平台的左视图。
图4为本发明的柔性仿生鱿鱼水下观测平台的俯视图。图5为本发明的柔性仿生鱿鱼水下观测平台的仰视图。图6为本发明的柔性仿生鱿鱼水下观测平台的剖面图。图7为本发明的柔性仿生鱿鱼水下观测平台的爆炸示意图。图8为本发明的柔性仿生鱿鱼水下观测平台的传感器集成机构的爆炸示意图。图9为本发明的柔性仿生鱿鱼水下观测平台的模块框架机构的爆炸示意图。图10为本发明的柔性仿生鱿鱼水下观测平台的机器人承载机构的爆炸示意图。图11为本发明的柔性仿生鱿鱼水下观测平台的平台支撑机构的爆炸示意图。图12为本发明的柔性仿生鱿鱼水下观测平台的平台支撑机构单一结构的爆炸示意图。图13为本发明的柔性仿生鱿鱼水下观测平台的集成金属层的结构示意图。图14为本发明的柔性仿生鱿鱼水下观测平台的模块金属层的结构示意图。图15为本发明的柔性仿生鱿鱼水下观测平台的承载金属层的结构示意图。图16为本发明的柔性仿生鱿鱼水下观测平台的支撑架连接件的结构示意图。图17为本发明的柔性仿生鱿鱼水下观测平台的短支撑架的结构示意图。图18为本发明的柔性仿生鱿鱼水下观测平台的长支撑架的结构示意图。图19为本发明的柔性仿生鱿鱼水下观测平台的玻璃钢浮球的结构示意图。图中各符号表示:传感器集成机构100、模块框架机构200、机器人承载机构300、平台支撑机构400、集成金属层101、玻璃钢浮球102、顶层定位开孔103、顶层倒角边框104、m20
×
80螺栓105、m20螺母106、模块金属层201、中层定位开孔202、中层倒角边框203、中层固定开孔204、信号线盒205、走线孔206、承载金属层301、底层定位柱302、标准对照尺303、短支撑架401、短支撑架定位柱402、短支撑架定位开孔403、长支撑架404、长支撑架定位柱405、机器人承载环406、长支撑架定位开孔407、支撑架连接件408、m20螺母409、m20
×
70螺栓410、m20螺母411、m20
×
100螺栓412、m20螺母413、m20
×
70螺栓414、m20螺母415、短支撑架连接柱416、长支撑架连接柱417。
具体实施方式
下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。如图1、2、3、4、5、6、7所示的一种用于柔性仿生鱿鱼水下观测平台,包括传感器集成机构100、模块框架机构200、机器人承载机构300、平台支撑机构400。如图7、8、13、19所示,集成金属层101、玻璃钢浮球102、顶层定位开孔103、顶层倒角边框104、m20
×
80螺栓105、m20螺母106共同形成了传感器集成机构100,玻璃钢浮球102固定孔径与集成金属层101对齐,每组两对m20
×
80螺栓105,m20螺母106配合固定。如图7、9、14所示,模块金属层201、中层定位开孔202、中层倒角边框203、中层固定开孔204、信号线盒205、走线孔206共同形成了模块框架机构200。如图7、10、15所示,承载金属层301、底层定位柱302、标准对照尺303共同形成了机器人承载机构300。
如图7、11、12、16、17、18所示,短支撑架401、短支撑架定位柱402、短支撑架定位开孔403、长支撑架404、长支撑架定位柱405、机器人承载环406、长支撑架定位开孔407、支撑架连接件408、m20螺母409、m20
×
70螺栓410、m20螺母411、m20
×
100螺栓412、m20螺母413、m20
×
70螺栓414、m20螺母415、短支撑架连接柱416、长支撑架连接柱417共同形成了平台支撑机构400单一结构,平台支撑机构400由四组单一结构组成。如图7、8、11、12、13、17所示,传感器集成机构100上顶层定位开孔103与平台支撑机构400中短支撑架402的短支撑架定位柱402采用轴孔间隙配合,四组顶层定位开孔103分别对应四组短支撑架402组合,并通过m20
×
70螺栓410,m20螺母411紧固配合,至此,传感器集成机构100与短支撑架402组合完毕。如图7、9、11、12、14、17、18所示,模块框架机构200上中层定位开孔204与平台支撑机构400中长支撑架404的长支撑架定位柱405采用轴孔间隙配合,四组中层定位开孔204分别对应四组长支撑架404组合,并且四组短支撑架402的短支撑架定位开孔403与长支撑架定位柱405采用轴孔间隙配合,并通过m20
×
100螺栓412,m20螺母413紧固配合,以及支撑架连接件408与两处短支撑架连接柱416,长支撑架连接柱417采用轴孔间隙配合,并通过m20螺母409紧固配合,模块框架机构200被长支撑架404贯穿定位的结构,至此,模块框架机构200与平台支撑机构400组合完毕。如图7、10、15、18所示,机器人承载机构300上底层定位柱302与平台支撑机构400中长支撑架404的长支撑架定位柱405采用轴孔间隙配合,四组底层定位柱302分别对应四组长支撑架404组合,并通过m20
×
70螺栓414,m20螺母415紧固配合,至此,机器人承载机构300与长支撑架404组合完毕。
45.如图7、10、11、12、15、18所示,平台支撑机构400上机器人承载环406为观测平台与测试装备的连接固定装置,通过将柔性仿生鱿鱼机器人或其他测试装备的固定钩与安全绳系于四组机器人承载环406,测试装备放至承载金属层301承载。上述柔性仿生鱿鱼水下观测平台,组装顺序自下而上,机器人承载机构300上底层定位柱302与四根长支撑架404底部长支撑架定位开孔407采用轴孔间隙配合后,模块框架机构200上中层定位开孔202与长支撑架404顶端长支撑架定位柱405采用轴孔间隙配合,再将短支撑架402底部短支撑架定位开孔403与长支撑架404顶端长支撑架定位柱405采用轴孔间隙配合,并通过m20
×
100螺栓412,m20螺母413紧固配合,以及支撑架连接件408与两处短支撑架连接柱416,长支撑架连接柱417采用轴孔间隙配合,并通过m20螺母409紧固配合,传感器集成机构100上顶层定位开孔103与短支撑架402顶端短支撑架定位柱402采用轴孔间隙配合,并通过m20
×
70螺栓410,m20螺母411紧固配合,完成整体平台组装。本实施例中,对传感器观测要求不高的情况下,机器人承载机构300可与长支撑架404、模块框架机构200、m20
×
70螺栓410,m20螺母411紧固配合成一级简易观测平台。本实施例中,外挂模块设备少的情况下,机器人承载机构300可与长支撑架404、传感器集成机构100、m20
×
70螺栓410,m20螺母411紧固配合成二级简易观测平台。本实施例中,通过吊装钢缆与顶层倒角边框104或中层倒角边框203捆系吊装,吊装时需保证柔性仿生鱿鱼水下观测平台竖直状态不可倾斜,并缓慢放置试验水域,下放速度不大于10米每分钟,下放深度依试验要求所定。以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并
不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。