1.本发明涉及管路维修设备技术领域,特别是涉及一种柔性自适应大长细比管路智能修复装置及使用方法。
背景技术:
2.目前的管道修复技术在修复部位上可分为外部修复和对内部进行修复,对外部修复普遍需要开挖,施工量大,成本高。对内部进行修复方法包括紫外线光固化管道内衬修复技术、注浆或树脂等材料修复等方法。但以上修复方法对局部点位的修复效果差,无法清理管内环境修复不稳固以及效率低等问题。而焊接修复作为一种方便易用且高效的修复方法可解决上述问题。如申请号cn201921559444.3,该装置需先将管件至于装置一侧的夹持装置上,另一侧的焊接装置通过滑轨进入管件内部进行焊接修复。在申请号cn202120486779.8中,该装置通过预先铺设的柔性电磁轨道实现行走,将装置主体送入管道内部,通过三个电机调节焊枪位置和角度进行焊接修复工作。在申请号cn202210390583.8中,该装置由履带式行走装置携带焊接装置进入管件内部进行焊接,但不可变径,也无法进行焊前、焊后处理。传统的修复技术需要大量操作空间、可达性差、施工难度大,目前在进行焊接修复时,一般都是通过手持焊枪对管道表面进行修复,修复过程较为吃力。因此,急需开发一种适用于大长细比的管路内部修复装置及使用方法。
技术实现要素:
3.本发明的目的是提供一种柔性自适应大长细比管路智能修复装置及使用方法,以解决上述现有技术存在的问题,实现管路内部喷砂除垢和自清理、可预热、全位置、后处理等一体化修复过程。
4.为实现上述目的,本发明提供了如下方案:本发明提供一种柔性自适应大长细比管路智能修复装置,包括若干组行走机构,每组所述行走机构包括行走支架和半径调节组件,所述半径调节组件位于所述行走支架中部,所述行走机构中部设置有用于驱动半径调节组件工作的第一电机,所述行走支架上设置有驱动行走支架移动的第二电机;所述行走支架可拆卸连接有若干根连接杆,若干根所述连接杆的端部可拆卸连接有工作部,所述工作部包括焊前喷砂机构或者加热机构或者焊接修复机构;所述行走支架上设置有定位传感器;相邻两组行走机构之间通过万向节连接;
5.所述焊前喷砂机构包括喷砂头、控制所述喷砂头旋转的第一旋转臂、用于为所述第一旋转臂提供动力的第三电机、用于为所述喷砂头供砂的第一储砂箱以及用于为喷砂头的喷砂工作提供动力的压缩气罐;
6.所述加热机构包括加热架以及用于驱动加热架转动的第四电机,所述电机与连接杆转动连接;
7.所述焊接修复机构包括焊枪、用于调节焊枪角度的第五电机、用于控制焊枪旋转的第二旋转臂以及用于为第二旋转臂提供动力的第六电机。
8.优选的,所述行走支架包括两组对称布置的行走组件,所述第一电机位于两组所述行走组件之间并与两组所述行走组件均固定连接,所述第一电机的输出轴与两组所述行走组件均垂直布置;每组所述行走组件包括安装板,所述安装板的周向上等间距铰接有三条行走臂,每组所述行走臂上连接有行进轮,其中一组所述行走臂上固设有用于驱动所述行进轮转动的第二电机。
9.优选的,所述半径调节组件设置有两组,两组所述半径调节组件与两组所述行走组件一一对应,每组所述半径调节包括连接板,所述连接板的周向上铰接有三根连杆,三根所述连杆与三根所述行走臂一一对应,相对应的所述连杆与所述行走臂相互铰接;
10.所述安装板远离所述第一电机的一侧面中部转动连接有丝杠,所述丝杠上与所述连接板中部螺纹连接;所述第一电机通过齿轮传动组件与所述丝杠转动连接。
11.优选的,所述齿轮传动组件包括相互啮合的第一齿轮和第二齿轮,以及相互啮合的第三齿轮和第四齿轮,所述第二齿轮和第三齿轮之间固定连接有传动杆;所述第一齿轮和所述第二齿轮位于一组安装板远离所述第一电机的一侧并与所述安装板转动连接,所述第三齿轮和所述第四齿轮位于另一组安装板远离所述第一电机的一侧并与安装板转动连接;所述第一电机的输出轴贯穿一组所述安装板并与所述第一齿轮中部固定连接。
12.优选的,所述丝杠设置有两组,所述第一齿轮中部远离所述第一电机的一侧与一根所述丝杠固定连接,所述第四齿轮中部远离所述第一电机的一侧与另一根所述丝杠固定连接;所述丝杠远离所述第一齿轮一端转动连接有固定板,所述固定板通过连接杆与所述安装板固定连接。
13.优选的,两组所述固定板均呈等边三角形,每组所述固定板上的边角处均开设有通孔,所述连接杆设置有三根,三根所述连接杆平行布置且端部平齐,三根所述连接杆依次贯穿两组所述固定板上的通孔。
14.优选的,所述压缩空气罐位于三根所述连接杆之间并与所述连接杆可拆卸连接,所述压缩空气罐紧靠固定板一侧布置并与所述固定板可拆卸连接;所述第一储砂箱紧靠所述压缩空气罐布置且两根连接杆固定连接,所述第三电机位于所述第一储砂箱的下方,所述第一旋转臂位于所述连接杆的端部,所述第三电机的输出轴与所述旋转臂固定连接;
15.三根所述连接杆的另一端部设置有吸砂组件,所述吸砂组件包括紧靠所述另一块所述固定板外侧布置的真空泵,所述真空泵连通第二储砂箱和吸砂头,所述第二储砂箱可拆卸连接在所述连接杆外侧,所述吸砂头安装在第三旋转臂上,所述第三旋转臂位于所述连接杆的端部并连接有第七电机。
16.优选的,所述加热架外部可拆卸连接有三组弧形加热板,三组所述加热板均采用电阻加热。
17.优选的,所述第五电机与焊枪直连,所述第五电机的机身与所述第二旋转臂的一侧固定连接,所述第六电机位于所述三组所述连接杆内部。
18.一种柔性自适应大长细比管路智能修复装置的使用方法,包括以下步骤:
19.a、将安装有焊前喷砂机构的行走机构、安装有加热机构的行走机构和安装有焊接修复机构的行走机构按顺序依次连接;
20.b、将连接好的所有行走机构放入待修复的管道中;
21.c、根据待修复管路的内径调整各行走机构的张开半径;
22.d、控制行走机构移动至管路内部待修复的位置;
23.e、在待修复位置控制焊前喷砂机构、加热机构和焊接修复机构依次工作。
24.本发明公开了以下技术效果:
25.(1)本发明提供一种适用于大长细比管路内部修复的智能化修复装置,可以实现管路内部喷砂除垢和自清理、可预热、全位置、后处理等一体化修复过程。
26.(2)本发明效率高、质量好、劳动强度低,可实现喷砂、清理、预热、修复、后热等系列修复作业;装置可以360
°
全位置修复;适用于大长细比管路特别是弯管的自适应修复。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
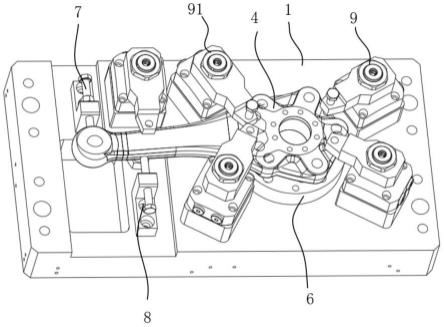
28.图1为本发明移动组件轴测图;
29.图2为本发明移动组件主视图;
30.图3为本发明焊前喷砂机构和回收机构轴测图;
31.图4为本发明焊前喷砂机构和回收机构主视图;
32.图5为本发明加热机构轴测图;
33.图6为本发明加热机构主视图;
34.图7为本发明焊接修复机构轴测图;
35.图8为本发明焊接修复机构主视图。
36.其中:1、安装板;2、行走臂;3、第一电机;4、第二电机;5、连杆;6、固定板;7、行进轮;8、连接板;9、丝杠;10、通孔;11、第二齿轮;12、第一齿轮;13、连接杆;14、第三齿轮;15、第四齿轮;16、传动杆;17、第六电机;18、第二旋转臂;19、第五电机;20、焊枪;21、第一储砂箱;22、压缩空气罐;23、第三电机;24、第一旋转臂;25、喷砂头;26、第二储砂箱;27、吸砂头;28、万向节;29、第七电机;30、真空泵;31、定位传感器;32、第四电机;33、第三旋转臂;34、加热架;35、加热板。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
39.参照图1-8,本发明提供一种柔性自适应大长细比管路智能修复装置,包括行走机构,行走机构包括行走支架和半径调节组件,半径调节组件位于行走支架中部,行走机构中部设置有用于驱动半径调节组件工作的第一电机3,行走支架上设置有驱动行走支架移动的第二电机4;行走支架可拆卸连接有若干组连接杆13,若干组连接杆13的端部可拆卸连接
有工作部,工作部包括焊前喷砂机构、加热机构和焊接修复机构;行走支架上设置有定位传感器30;焊前喷砂机构包括喷砂头25、控制喷砂头25旋转的第一旋转臂24、用于为第一旋转臂24提供动力的第三电机23、用于为喷砂头25供砂的第一储砂箱21以及用于为喷砂头25的喷砂工作提供动力的压缩气罐;加热机构包括加热架34以及用于驱动加热架34转动的第四电机32,第四电机32与连接杆13转动连接;焊接修复机构包括焊枪20、用于调节焊枪20角度的第五电机19、用于控制焊枪20旋转的第二旋转臂18以及用于为第二旋转臂18提供动力的第六电机17。本发明提供一种适用于大长细比管路内部修复的智能化修复装置,可以实现管路内部喷砂除垢和自清理、可预热、全位置、后处理等一体化修复过程。本发明效率高、质量好、劳动强度低,可实现喷砂、清理、预热、修复、后热等系列修复作业;装置可以360
°
全位置修复;适用于大长细比管路特别是弯管的自适应修复。本发明提供一种集焊前清理、预热、焊接修复、焊后热处理于一体的可变径全位置智能管道内部修复装置,通过焊前清理模块有效的处理掉管道内外表面的油、锈、垢,保证焊接修复的顺利进行,以及加热机构进行焊前预热及焊后热处理有效保证焊接修复的质量。
40.行走支架包括两组对称布置的行走组件,第一电机3位于两组行走组件之间并与两组行走组件均固定连接,第一电机3的输出轴与两组行走组件均垂直布置;每组行走组件包括安装板1,安装板1的周向上等间距铰接有三条行走臂2,每组行走臂2上连接有行进轮7,其中一组行走臂2上固设有用于驱动行进轮7转动的第二电机4。第二电机4的输出轴连接有第一锥形齿轮,所述行进轮7一端连接有第二锥形齿轮,所述第一锥形齿轮和所述第二锥形齿轮相互啮合,两者垂直布置,通过第一电机3带动第一锥形齿轮转动,由第一锥形齿轮调动第二锥形齿轮转动,进而带动行进轮7转动,实现装置整体的前进或后退。
41.半径调节组件设置有两组,每组半径调节组件与一组行走组件相对应,每组半径调节包括连接板8,连接板8的周向上铰接有三根连杆5,每根连杆5与一条行走臂2相对应,相对应的连杆5与行走臂2相互铰接;半径调节组件可以调节三组行走臂2的张开范围,使装置可以适用于不同管径的管路,提高装置的实用性。
42.安装板1远离第一电机3的一侧面中部转动连接有丝杠9,丝杠9上与连接板8中部螺纹连接;第一电机3通过齿轮传动组件与丝杠9转动连接。
43.齿轮传动组件包括相互啮合的第一齿轮12和第二齿轮11,以及相互啮合的第三齿轮14和第四齿轮15,第二齿轮11和第三齿轮14之间固定连接有传动杆16;第一齿轮12和第二齿轮11位于一组安装板1远离第一电机3的一侧并与安装板1转动连接,第三齿轮14和第四齿轮15位于另一组安装板1远离第一电机3的一侧并与安装板1转动连接;第一电机3的输出轴贯穿一组安装板1并与第一齿轮12中部固定连接。
44.丝杠9设置有两组,第一齿轮12中部远离第一电机3的一侧与一根丝杠9固定连接,第四齿轮15中部远离第一电机3的一侧与另一根丝杠9固定连接;丝杠9远离第一齿轮12一端转动连接有固定板6,固定板6通过连接杆13与安装板1固定连接。
45.两组固定板6均呈等边三角形,每组固定板6上的边角处均开设有通孔10,连接杆13设置有三根,三根连接杆13平行布置且端部平齐,三根连接杆13依次贯穿两组固定板6上的通孔10。
46.压缩空气罐22位于三根连接杆13之间并与连接杆13可拆卸连接,压缩空气罐22紧靠固定板6一侧布置并与固定板6可拆卸连接;第一储砂箱21紧靠压缩空气罐22布置且两根
连接杆13固定连接,第三电机23位于第一储砂箱21的下方,第一旋转臂24位于连接杆13的端部,第三电机23的输出轴与旋转臂固定连接;以定位传感器30定位,压缩空气为动力将砂通过喷头喷向焊缝完成喷砂,其中喷砂头25可伸缩可360
°
旋转保证对管道内部进行全面喷砂。
47.三根连接杆13的另一端部设置有吸砂组件,吸砂组件包括紧靠另一块固定板6外侧布置的真空泵30,真空泵30连通第二储砂箱26和吸砂头27,第二储砂箱26可拆卸连接在连接杆13外侧,吸砂头27安装在第三旋转臂上,第三旋转臂位于连接杆13的端部并连接有第七电机29。上述回收机构由行走装置携带定位传感器30、吸砂头27、第七电机29,由第七电机29提供吸力,吸砂头27将砂吸回回收,吸砂头27可伸缩、可360
°
旋转。
48.加热架34外部可拆卸连接有三组弧形加热板,三组加热板均采用电阻加热。通过电源使电阻发热;加热板35安装在加热架34上,并可以沿加热架34径向移动,适应于不同半径管件,调整至合适长度对管件内壁进行预热和焊后热处理。
49.第五电机19与焊枪20直连,第五电机19的机身与第二旋转臂18的一侧固定连接,第六电机17位于三组连接杆13内部。由外部提供电源和焊丝,定位传感器30定位后进行焊接修复。第五电机19可调节第二旋转臂18角度,实现多角度自动焊接修复。第二旋转臂18可调节半径,适应不同半径管件。其中,第一旋转臂24、第二旋转臂18和第三旋转臂33均可自动调节伸出长度。
50.工作过程:
51.a、将安装有焊前喷砂机构的行走机构、安装有加热机构的行走机构和安装有焊接修复机构的行走机构按顺序依次连接;其中加热机构结构安装有多组,可以在焊接完毕后对管路焊后部位进行热处理;其中行走机构均为相同的行走机构,相邻两个行走机构之间可以通过万向节28连接,只需要将焊前喷砂机构或者加热机构或者焊接修复机构安装在行走机构上即可;上述的焊前喷砂机构或者加热机构或者焊接修复机构均与行走机构行的连接杆13连接。
52.b、将连接好的所有行走机构放入待修复的管道中;
53.c、根据待修复管路的内径调整各行走机构的张开半径;放入后,行走机构是没有张开的,当装置完全放入后,启动第一电机3,第一电机3会带动传动齿轮组件转动,进而带动丝杠9移动,通过连接板8带动连杆5控制行走臂2张开,使行进轮7与管道内壁贴合。
54.d、控制行走机构移动至管路内部待修复的位置;通过定位传感器30对待修复位置进行定位,实现装置自动的移动至管道内部待修复的部位。
55.e、在待修复位置控制焊前喷砂机构、加热机构和焊接修复机构依次工作;喷砂机构在对待修复的位置喷砂后,其后部的吸砂机构可以将管道内的砂进行回收;然后加热机构张开与管径内部进行适配,并通电使电阻升温,对待修复位置进行加热,然后控制焊接修复机构进行焊接。
56.在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
57.以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行
限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。