1.本发明涉及机械臂搬运技术领域,更具体地涉及一种基于电气自动化的多角度可调式机械臂。
背景技术:
2.机械臂一般用于货物的搬运工作,在车间生产活动中,货物需要进行上料与下料的操作,使用电气自动化机械臂可以替代原先人工重复性的搬运工作,并且可以大大的提升工作效率,因此在现代化的工厂中,都会引进电气自动化机械臂来进行货物的夹持搬运以及上下料工作;
3.机械臂是一种工业机器人,一般来说为了使机械臂的夹手可以触及其所处空间内的任一坐标,其机械臂的空间运动必须达到六个自由度,即可以满足x轴、y轴与z轴方向上的直线运动以及满足x轴、y轴与z轴上的旋转运动,为了尽可能的满足货物的搬运工作,工厂一般会选用六轴机械臂来进行工作,由于六轴机械臂具有高自由度的运动特点,从而可以灵活的进行货物搬运工作,但是在实际使用时,该机械臂仍然具有以下不足之处;
4.首先,传统的机械臂在利用夹手对货物进行抓取时,其夹持的力度设定与其控制夹手开合的轴向电机转矩大小有关,因此在抓取一些刚性底、强度底的货物时,传统的机械臂在进行夹持时容易对此类货物造成损伤,即传统的机械臂并没有一种缓冲机构来对货物夹取过程提供缓冲效果,并且在货物夹取搬运的过程中,机械臂的各个关节连接处长期产生相对运动,传统的机械臂也没有一种在工作时可以进行润滑的结构来防止机械臂关节处发生磨损;
5.其次,传统的六轴机械臂虽然具有高自由度的运动效果,但是由于其底座安装场地范围有限,导致其机械臂夹手的工作范围有限,即传统的机械臂无法进行较大范围的搬运工作;
6.因此,需要提供一种基于电气自动化的多角度可调式机械臂来解决上述问题。
技术实现要素:
7.为了克服现有技术的上述缺陷,本发明提供了一种基于电气自动化的多角度可调式机械臂,以解决上述背景技术中存在的问题。
8.本发明提供如下技术方案:一种基于电气自动化的多角度可调式机械臂,包括底座运动组件,所述底座运动组件的底端设有传动组件,所述传动组件的上端设有臂轴组件,所述臂轴组件的上端设有夹持组件,所述夹持组件的末端设有夹板组件;
9.所述底座运动组件包括有第一安装座与第二安装座,所述第一安装座、第二安装座的顶端均固定连接有连接板,所述连接板之间固定连接有滑轨,所述连接板之间活动连接有丝杠,所述丝杠之间传动连接有同步带,所述丝杠的轴体固定连接有伺服电机的驱动轴;
10.所述夹持组件包括有齿板件,所述齿板件之间相互对称且相互啮合连接,所述齿
板件的外侧面活动安装有紧固件;
11.所述夹板组件包括有夹板盒,所述夹板盒的内侧设有内板,所述内板的四边均设有折板,所述折板与内板将夹板盒的内部空间进行密封,所述夹板盒的内部设有海绵,所述海绵储存有润滑油。
12.进一步的,所述丝杠传动连接有滑板,所述滑板固定套接有第一轴承,所述第一轴承的内圈固定套接有安装台,所述安装台的上表面固定安装有ii轴臂,所述滑板的两端分别与两侧的滑轨活动连接。
13.进一步的,所述传动组件包括有i轴臂座,所述i轴臂座的内部固定安装有第一电机,所述i轴臂座的上端固定连接有封板,所述封板的中心处固定套接有第二轴承,所述第二轴承的内圈与第一电机的驱动端驱动套接,所述第一电机的驱动端固定连接有可伸缩式万向轴的底端,所述可伸缩式万向轴的顶端与安装台的底端固定连接。
14.进一步的,所述臂轴组件包括有iii轴臂,所述iii轴臂的底端与ii轴臂活动连接,所述ii轴臂的内部固定安装有第二电机,所述第二电机的驱动轴与iii轴臂的底端固定连接,所述iii轴臂的上端活动连接有iv轴臂,所述iv轴臂的内部固定安装有第三电机,所述第三电机的驱动轴与iii轴臂的上端固定连接,所述iv轴臂的末端活动连接有v轴臂,所述iv轴臂的内部固定安装有第四电机,所述第四电机的驱动轴与v轴臂固定连接,所述v轴臂的内部固定安装有第五电机,所述v轴臂的末端活动连接有vi轴臂,所述第五电机的驱动轴与vi轴臂固定连接,所述vi轴臂的侧面固定安装有第六电机。
15.进一步的,所述齿板件的数量为两个且与vi轴臂活动连接,所述齿板件与第六电机的驱动轴固定连接,所述齿板件的末端活动连接有活动条,所述活动条的中端活动连接有连接条的一端,所述连接条的另一端与vi轴臂活动连接,所述活动条的末端与夹板组件固定连接。
16.进一步的,所述夹板盒的外侧面均固定连接有油管,所述油管的管体均设有泄压阀,所述油管的管体末端分别与第二电机、第三电机的驱动轴连接处进行密封连接。
17.本发明的技术效果和优点:
18.1.本发明设有夹持组件与夹板组件,该机械臂在工作时,当夹板盒进行开合运动对货物进行夹持时,内板首先接触货物表面,夹持产生的压力使海绵收缩,当压力超过泄压阀的设定值时,油管的管体被导通,储存在海绵中的润滑油便会通过泄压阀注入第二电机、第三电机的驱动轴连接处进行润滑,海绵的缓冲效果还可以防止表面强度低下的货物被损坏。
19.2.本发明设有底座运动组件与传动组件,该机械臂在工作时,第一安装座与第二安装座可以固定安装在地面,伺服电机可以利用同步带同步驱动丝杠进行旋转,丝杠旋转可以带动滑板在滑轨上做水平位移,利用该结构可以使安装在安装台上部分的机构进行水平运动,从而扩大其工作范围,当滑板在水平方向上进行位移时,第一电机可以驱动可伸缩式万向轴进行旋转,可伸缩式万向轴可以将第一电机的驱动动力传递到安装台上,从而保持了安装台在进行水平运动时还可以进行旋转,利用可伸缩式万向轴进行两轴之间的动力传递,保证了滑板在该水平范围内运动时不会影响到该设备的底部轴向动力传动效果。
附图说明
20.图1为本发明的整体结构示意图。
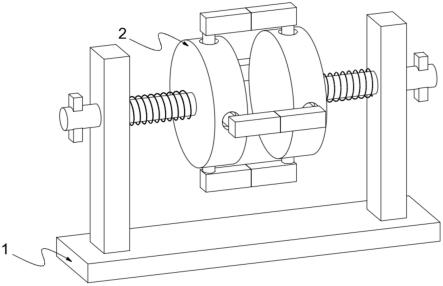
21.图2为本发明的底座运动组件结构示意图。
22.图3为本发明的传动组件结构示意图。
23.图4为本发明的臂轴组件结构示意图。
24.图5为本发明的夹持组件结构示意图。
25.图6为本发明的夹板组件剖面结构示意图。
26.图7为本发明的油管末端连接处结构示意图。
27.附图标记为:1、底座运动组件;101、第一安装座;102、第二安装座;103、连接板;104、滑轨;105、丝杠;106、同步带;107、伺服电机;108、滑板;109、第一轴承;110、安装台;111、ii轴臂;2、传动组件;201、i轴臂座;202、第一电机;203、封板;204、第二轴承;205、可伸缩式万向轴;3、臂轴组件;301、iii轴臂;302、第二电机;303、iv轴臂;304、第三电机;305、v轴臂;306、第四电机;307、第五电机;308、vi轴臂;309、第六电机;4、夹持组件;401、齿板件;402、紧固件;403、活动条;404、连接条;5、夹板组件;501、夹板盒;502、内板;503、折板;504、海绵;505、油管;506、泄压阀;
具体实施方式
28.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,另外,在以下的实施方式中记载的各结构的形态只不过是例示,本发明所涉及的一种基于电气自动化的多角度可调式机械臂并不限定于在以下的实施方式中记载的各结构,在本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施方式都属于本发明保护的范围。
29.参照图1,本发明提供了一种基于电气自动化的多角度可调式机械臂,包括底座运动组件1,底座运动组件1的底端设有传动组件2,传动组件2的上端设有臂轴组件3,臂轴组件3的上端设有夹持组件4,夹持组件4的末端设有夹板组件5;
30.在本实施例中,臂轴组件3的底部结构架设在底座运动组件1的上端并可以进行活动,传动组件2为臂轴组件3提供旋转动力,底座运动组件1为臂轴组件3提供水平的运动能力,夹板组件5可以进行开合从而实现货物的夹取效果。
31.参照图2,底座运动组件1包括有第一安装座101与第二安装座102,第一安装座101、第二安装座102的顶端均固定连接有连接板103,连接板103之间固定连接有滑轨104,连接板103之间活动连接有丝杠105,丝杠105之间传动连接有同步带106,丝杠105的轴体固定连接有伺服电机107的驱动轴,丝杠105传动连接有滑板108,滑板108固定套接有第一轴承109,第一轴承109的内圈固定套接有安装台110,安装台110的上表面固定安装有ii轴臂111,滑板108的两端分别与两侧的滑轨104活动连接;
32.在本实施例中,第一安装座101与第二安装座102可以固定安装在地面,伺服电机107可以利用同步带106同步驱动丝杠105进行旋转,丝杠105旋转可以带动滑板108在滑轨104上做水平位移,利用该结构可以使安装在安装台110上部分的机构进行水平运动,从而扩大其工作范围。
33.参照图3,传动组件2包括有i轴臂座201,i轴臂座201的内部固定安装有第一电机
202,i轴臂座201的上端固定连接有封板203,封板203的中心处固定套接有第二轴承204,第二轴承204的内圈与第一电机202的驱动端驱动套接,第一电机202的驱动端固定连接有可伸缩式万向轴205的底端,可伸缩式万向轴205的顶端与安装台110的底端固定连接;
34.在本实施例中,当滑板108在水平方向上进行位移时,第一电机202可以驱动可伸缩式万向轴205进行旋转,可伸缩式万向轴205可以将第一电机202的驱动动力传递到安装台110上,从而保持了安装台110在进行水平运动时还可以进行旋转,利用可伸缩式万向轴205进行两轴之间的动力传递,保证了滑板108在该水平范围内运动时不会影响到该设备的底部轴向动力传动效果。
35.参照图4,臂轴组件3包括有iii轴臂301,iii轴臂301的底端与ii轴臂111活动连接,ii轴臂111的内部固定安装有第二电机302,第二电机302的驱动轴与iii轴臂301的底端固定连接,iii轴臂301的上端活动连接有iv轴臂303,iv轴臂303的内部固定安装有第三电机304,第三电机304的驱动轴与iii轴臂301的上端固定连接,iv轴臂303的末端活动连接有v轴臂305,iv轴臂303的内部固定安装有第四电机306,第四电机306的驱动轴与v轴臂305固定连接,v轴臂305的内部固定安装有第五电机307,v轴臂305的末端活动连接有vi轴臂308,第五电机307的驱动轴与vi轴臂308固定连接,vi轴臂308的侧面固定安装有第六电机309;
36.在本实施例中,上述组件结构为典型的六轴机械臂构造,通过其设有的第二电机302、第三电机304、第四电机306、第五电机307、第六电机309以及底部所设有的第一电机202这六个电机实现该机械臂的六自由度的运动效果,由于该结构效果与工作原理为现有技术下的常规技术手段,因此在本说明书以及附图中不做具体说明。
37.参照图5,夹持组件4包括有齿板件401,齿板件401的数量为两个且与vi轴臂308活动连接,齿板件401之间相互对称且相互啮合连接,齿板件401与第六电机309的驱动轴固定连接,齿板件401的外侧面活动安装有紧固件402,齿板件401的末端活动连接有活动条403,活动条403的中端活动连接有连接条404的一端,连接条404的另一端与vi轴臂308活动连接,活动条403的末端与夹板组件5固定连接;
38.在本实施例中,第六电机309可驱动齿板件401之间运动从而实现其末端的夹板组件5进行货物的夹持动作,夹板组件5具有缓冲功能,可以防止其在夹持过程对货物造成损坏。
39.参照图6和图7,夹板组件5包括有夹板盒501,夹板盒501的内侧设有内板502,内板502的四边均设有折板503,折板503与内板502将夹板盒501的内部空间进行密封,夹板盒501的内部设有海绵504,海绵504储存有润滑油,夹板盒501的外侧面均固定连接有油管505,油管505的管体均设有泄压阀506,油管505的管体末端分别与第二电机302、第三电机304的驱动轴连接处进行密封连接;
40.在本实施例中,当夹板盒501进行开合运动对货物进行夹持时,内板502首先接触货物表面,夹持产生的压力使海绵504收缩,当压力超过泄压阀506的设定值时,油管505的管体被导通,储存在海绵504中的润滑油便会通过泄压阀506注入第二电机302、第三电机304的驱动轴连接处进行润滑,海绵504的缓冲效果还可以防止表面强度低下的货物被损坏,需要补充说明的是,油管505的管体还可以外接其他关节处的驱动轴部位,其润滑原理与效果相同,因此在本实施例中不做详细描述。
41.本发明的工作原理:该基于电气自动化的多角度可调式机械臂在进行工作时,第
一安装座101与第二安装座102可以固定安装在地面,伺服电机107可以利用同步带106同步驱动丝杠105进行旋转,丝杠105旋转可以带动滑板108在滑轨104上做水平位移,利用该结构可以使安装在安装台110上部分的机构进行水平运动,从而扩大其工作范围,当滑板108在水平方向上进行位移时,第一电机202可以驱动可伸缩式万向轴205进行旋转,可伸缩式万向轴205可以将第一电机202的驱动动力传递到安装台110上,从而保持了安装台110在进行水平运动时还可以进行旋转,利用可伸缩式万向轴205进行两轴之间的动力传递,保证了滑板108在该水平范围内运动时不会影响到该设备的底部轴向动力传动效果,当夹板盒501进行开合运动对货物进行夹持时,内板502首先接触货物表面,夹持产生的压力使海绵504收缩,当压力超过泄压阀506的设定值时,油管505的管体被导通,储存在海绵504中的润滑油便会通过泄压阀506注入第二电机302、第三电机304的驱动轴连接处进行润滑,海绵504的缓冲效果还可以防止表面强度低下的货物被损坏。
42.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
43.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
44.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。