1.本发明涉及自动控制技术领域,确切地说是一种基于新型运动轨迹规划的三维天车递归滑模控制方法。
背景技术:
2.在众多类型的起重机械中,天车是一种作间歇、循环运动的机械,常用于冶金车间、码头装卸、物流仓库、建筑工地等诸多领域,在国民经济建设中占据着举足轻重的地位。对于天车系统而言,面临的最大问题在于小车和桥架运行及外部扰动(如阵风、碰撞等)引发的负载摆动,降低了运输效率,影响负载的精准放置作业,还可能引起碰撞以造成安全事故。在一些特殊场合,如熔融金属、危化液体的搬运,对摆动角度的要求十分严格,甚至期望“无摆”运送。随着天车系统向高效率、高精度、智能化等方向发展,其工作条件更加复杂,通常需要小车和桥架同步运行,负载呈空间球面摆动,对动态品质和控制性能的要求更加苛刻。如何保证天车高效运行、精准定位,并充分抑制负载摆动,提高系统的运输效率与安全性能,是天车系统控制策略研究亟待解决的关键技术之一。
3.对于实际的三维天车系统而言,其状态量之间存在更加复杂的耦合关系,特别是当系统偏离平衡点较远时,若将三维天车视为两个独立的二维天车进行分析,将带来很大的控制误差,其控制效果大打折扣。提出的多段式加速度轨迹均需要在特定时刻切换速度,其加速度在切换点处无穷大,给执行器造成较大冲击,并增加负载摆动幅度,无法保证系统的平顺运行。
4.由上述分析可知,引入平滑过渡环节的参考轨迹更有利于天车系统平顺起动,提升负载消摆性能,如s型轨迹。然而,目前设计的s型轨迹只有文献中提到的一类(“a motion planning-based adaptive control method for an underactuated crane system”),是基于运动学分析和经验设计的,无法全面运用于所有工况。此外,虽然有很多传感器可以用于测量负载摆动角度,然而由于天车工作环境恶劣,存在传感器安装位置受限,测量精度无法保证,待测区域复杂而导致测量信息不完整等众多不足之处。
技术实现要素:
5.本发明要解决的技术问题是提供一种基于新型运动轨迹规划的三维天车递归滑模控制方法,该方法为小车和桥架运行规划一条平滑的参考轨迹,基于状态观测器估计到的信息作为控制器的反馈,设计递归滑模控制器跟踪规划的参考轨迹,以实现小车和桥架的定位和消摆功能。。
6.为解决上述技术问题,本发明采用如下技术手段:
7.一种基于新型运动轨迹规划的三维天车递归滑模控制方法,包括运动轨迹规划和基于动力学模型的控制,所述的运动轨迹规划是对小车和桥架的运动规划,运动规划为过渡平滑的s型轨迹,其速度和加速度的过渡相对平滑,有效避免突变加剧负载摆动;所述的基于动力学模型的控制,是基于滑模控制理论,采用状态观测器反馈状态信息,构建包含位
置和负载摆动角度的复合递归滑模面,设计小车、桥架定位和负载消摆控制器;所述的运动轨迹规划,规划的轨迹表达式如下:
[0008][0009]
所述的运动轨迹规划,规划的轨迹速度和加速度表达式如下:
[0010][0011][0012]
式(1)-(3)中,pd为目标位置,ε和v是关于运行状态的可调参数;t是系统时间。
[0013]
设定天车系统动力学模型为:
[0014][0015]
其中,m,m
x
,my分别表示负载、小车、桥架的质量;l是缆绳长度;g是重力加速度;θ
x
,θy分别是x,y方向的摆动角度;f
x
,fy是驱动小车和桥架的电机控制量,即电机驱动力;s
x
,sy,c
x
和cy分别代表sin(θ
x
),sin(θy),cos(θ
x
)和cos(θy);
[0016]
为了便于控制器设计,将上式转换为状态空间表达式,其表达式如下:
[0017][0018]
其中,x1=[x y θ
x θy]
t
,u=[f
x fy]
t
;
[0019]
[0020][0021]
考虑到天车是典型的欠驱动系统,无法直接控制负载的摆动,而是通过分析位移和摆动的耦合关系,通过控制小车和桥架的位移以消除负载摆动,因此构建广义耦合信号、构建广义位移误差信号如下:
[0022][0023][0024]
其中,r
x
和ry分别为规划的小车和桥架的位移轨迹;
[0025]
构建递归滑模面:
[0026][0027][0028]
递归滑模控制律表达式如下:
[0029][0030]
其中,
[0031][0032]
k1,k2,k3,k4,λ均为控制器增益,其中λ>1,均根据天车实际运行工况选取。
[0033]
在已有的参考轨迹中,仅位移曲线是平滑的,但速度和加速度曲线,特别是加速度曲线是连续的,但在速度切换点处不光滑,直接导致切换点处的加加速度无穷大,给电机带来巨大冲击,加剧了负载的摆动。本发明规划的参考轨迹是一种类s型曲线,其速度和加速度均为过渡平滑的曲线,即曲线是光滑连续的;本发明是基于滑模控制理论,采用状态观测器反馈状态信息,构建包含位置和负载摆动角度的复合递归滑模面,设计小车、桥架定位和负载消摆控制器从而实现小车和桥架的定位和消摆功能。
[0034]
作为对本技术方案的进一步改进:
[0035]
所述的标准状态空间表达式进行转换:
[0036][0037]
则,
[0038][0039]
其中,y3=f(x1,x2),将y3作为内外扰动的总和,并当作扩张状态,假设y3和都是有界的,并记则系统可被扩张成三阶非线性时变系统如下:
[0040][0041]
设计非线性扩张状态观测器对y1、y2和y3进行观测,所述的状态观测器为非线性扩张状态观测器,用于估计负载摆动角度、角速度,以及桥架运行的速度、加速度;针对扩张的三阶系统,为了有效避免高频抖振现象和微分峰值现象,后者主要是由于系统状态初值与扩张状态观测器的状态初值相关较大时导致的,故,基于类sigmoid函数设计扩张状态观测器如下:
[0042][0043]
其中,sigmoid函数为向量z1是对非线性系统x1的实时估计,向量是对非线性系统x2的实时估计,向量z2是对外界干扰的实时估计。
[0044]
所述的控制器设计第一步是求取广义耦合信号,包括
[0045]
所述的控制器广义位移误差信号包括所述的控制器广义位移误差信号包括
附图说明
[0046]
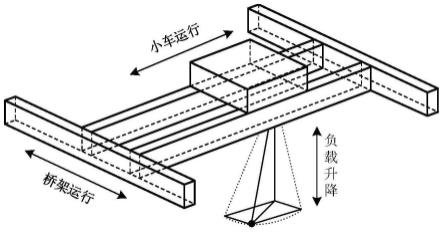
图1为本发明所述的三维天车系统示意图。
[0047]
图2为本发明所述的规划的位移、速度、加速度轨迹图。
[0048]
图3为本发明所述的不同目标位置和不同调节参数下的参考轨迹轮廓图。
[0049]
图4为本发明所述的天车控制器框图。
[0050]
图5为本发明所述的控制效果仿真图。
[0051]
图6为本发明所述的位移、摆动角度实际值与观测值对比图。
[0052]
图7为本发明所述的速度、摆动角速度实际值与观测值对比图。
具体实施方式
[0053]
下面结合实施例,进一步说明本发明。
[0054]
参见图1-图4,本发明的一种基于新型运动轨迹规划的三维天车递归滑模控制方法,包括运动轨迹规划和基于动力学模型的控制,所述的运动轨迹规划是对小车和桥架的运动规划,运动规划为过渡平滑的s型轨迹,其速度和加速度的过渡相对平滑,有效避免突变加剧负载摆动;所述的基于动力学模型的控制,是基于滑模控制理论,采用状态观测器反馈状态信息,构建包含位置和负载摆动角度的复合递归滑模面,设计小车、桥架定位和负载消摆控制器;所述的运动轨迹规划,规划的轨迹表达式如下:
[0055][0056]
所述的运动轨迹规划,规划的轨迹速度和加速度表达式如下:
[0057][0058][0059]
式(1)-(3)中,pd为目标位置,ε和v是关于运行状态的可调参数;t是系统时间。
[0060]
设定天车系统动力学模型为:
[0061][0062]
其中,m,m
x
,my分别表示负载、小车、桥架的质量;l是缆绳长度;g是重力加速度;θ
x
,θy分别是x,y方向的摆动角度;f
x
,fy是驱动小车和桥架的电机控制量,即电机驱动力;s
x
,sy,c
x
和cy分别代表sin(θ
x
),sin(θy),cos(θ
x
)和cos(θy);
[0063]
为了便于控制器设计,将上式转换为状态空间表达式,其表达式如下:
[0064][0065]
其中,x1=[x y θ
x θy]
t
,u=[f
x fy]
t
;
[0066]
[0067][0068]
考虑到天车是典型的欠驱动系统,无法直接控制负载的摆动,而是通过分析位移和摆动的耦合关系,通过控制小车和桥架的位移以消除负载摆动,因此构建广义耦合信号、构建广义位移误差信号如下:
[0069][0070][0071]
其中,r
x
和ry分别为规划的小车和桥架的位移轨迹;
[0072]
构建递归滑模面:
[0073][0074][0075]
递归滑模控制律表达式如下:
[0076][0077]
其中,
[0078][0079]
k1,k2,k3,k4,λ均为控制器增益,其中λ>1,均根据天车实际运行工况选取。
[0080]
在已有的参考轨迹中,仅位移曲线是平滑的,但速度和加速度曲线,特别是加速度曲线是连续的,但在速度切换点处不光滑,直接导致切换点处的加加速度无穷大,给电机带来巨大冲击,加剧了负载的摆动。本发明规划的参考轨迹是一种类s型曲线,其速度和加速度均为过渡平滑的曲线,即曲线是光滑连续的;本发明是基于滑模控制理论,采用状态观测器反馈状态信息,构建包含位置和负载摆动角度的复合递归滑模面,设计小车、桥架定位和负载消摆控制器从而实现小车和桥架的定位和消摆功能。
[0081]
作为对本技术方案的进一步改进:
[0082]
所述的标准状态空间表达式进行转换:
[0083][0084]
则,
[0085][0086]
其中,y3=f(x1,x2),将y3作为内外扰动的总和,并当作扩张状态,假设y3和都是有界的,并记则系统可被扩张成三阶非线性时变系统如下:
[0087][0088]
设计非线性扩张状态观测器对y1、y2和y3进行观测,所述的状态观测器为非线性扩张状态观测器,用于估计负载摆动角度、角速度,以及桥架运行的速度、加速度;针对扩张的三阶系统,为了有效避免高频抖振现象和微分峰值现象,后者主要是由于系统状态初值与扩张状态观测器的状态初值相关较大时导致的,故,基于类sigmoid函数设计扩张状态观测器如下:
[0089][0090]
其中,sigmoid函数为向量z1是对非线性系统x1的实时估计,向量是对非线性系统x2的实时估计,向量z2是对外界干扰的实时估计。
[0091]
所述的控制器设计第一步是求取广义耦合信号,包括
[0092]
所述的控制器广义位移误差信号包括所述的控制器广义位移误差信号包括
[0093]
实施例:
[0094]
(1)运动轨迹规划:
[0095]
如图1所示的天车系统,属于典型的欠驱动系统,正是由于其欠驱动特性,可控的变量只有小车和桥架的位移,且小车和桥架的运行与负载摆动是矛盾的,即运行越慢,负载摆动越小,但同时也降低了运行效率,无法满足正常的工作需求。为了平衡所述的矛盾,有必要为小车和桥架的运行规划一条平滑的s型轨迹,即要保证传输效率,又能抑制负载的大幅度摆动。为了避免参考轨迹的速度和加速度在特定时刻切换时的突变,加剧负载的摆动,本发明规划了一条速度和加速度均为平滑过渡的s型曲线,小车和桥架的速度轨迹表达式分别为加速度轨迹表达式分别为
因此,生成的位移轨迹表达式分别为因此,生成的位移轨迹表达式分别为其曲线轮廓如图2所示。
[0096]
轨迹表达式中pd为目标位置,ε和v是关于运行状态的可调参数。根据实际运行工况,只要选取的参数合理,可以得到期望的运行轨迹。
[0097]
为了验证所述的参考轨迹在不同目标位置需求的情况下的可行性,以及不同调节参数变化下的轨迹变化情况,如附图3所示。
[0098]
从位移曲线中可以看出,生成的参考轨迹可以保证小车和桥架以不同的速度和加速度到达期望的目标位置,可以实现精准定位。从速度和加速度曲线中可以看出,速度切换平滑,不发生剧烈跳跃,因此可以保证负载不发生剧烈的大幅度摆动,驱动电机无冲击,进而可以保证天车系统平稳运行。
[0099]
(2)基于动力学模型的控制
[0100]
基于非线性扩张状态观测器实时反馈天车系统的状态量,包括位移信号、速度信号、角度信号、角速度信号,与参考轨迹之间构造偏差,考虑系统的欠驱动特性,快速消除负载摆动,构造两个广义耦合信号:两个广义耦合信号:
[0101]
基于所述的耦合信号,与期望位移构造两个广义偏差信号:设计的递归滑模控制律为其中其中k1,k2,k3,k4,λ均为控制器增益。
[0102]
为了验证本发明在天车系统上的可行性,采用数值仿真的方法对本发明内容进行了验证。搭建了天车系统的仿真模型,小车和桥架的位移将跟踪规划的位移轨迹,系统的输出观测器输出。
[0103]
仿真中,选取天车模型参数如下:
[0104]
m=1kg,m
x
=6.5kg,my=10kg,l=1.25m,g=9.8m/s2。
[0105]
小车的目标位置为xd=0.6m,桥架的目标位置为yd=0.5m。
[0106]
选取参考位移中的参数如下:ε=6.5,v=2.5。
[0107]
控制律中涉及的控制增益如下:ω
x
=ωy=2,λ=1.6,k1=12,k2=1.4,k3=15,k4=1.5,k
x
=1.8,ky=2.3。
[0108]
仿真结果如附图2和附图5所示,图2反映了规划的轨迹位移、速度和加速度随时间变化的曲线,从图中可以看出,加速度曲线是连续可导,即加加速度也是平滑的曲线,这种过渡平滑的曲线有助于平衡提高运行效率和抑制负载摆动之间的矛盾。
[0109]
附图5展示了在本发明所规划的参考轨迹引导下,小车和桥架的位移、负载摆动角
度以及电机驱动力随时间变化的曲线。从图中可以看出,小车和桥架可以在有限时间内准确到达期望的目标位置,分别是0.6m和0.5m,整个运输过程平滑无振荡;对于负载摆动抑制控制,其负载摆动幅度不超过1
°
,且当小车和桥架到达目标位置停止后基本无残余摆动;而在电机驱动方面,可以看出电机响应速度快,能量消耗少,对电机的最大功率要求更低。
[0110]
附图6是小车、桥架位移和摆动角度的实际值与观测值对比图,附图7是速度和角速度的实际值与观测值对比图。附图6-附图7清晰反映了本发明所述的非线性扩张状态观测器的可行性,图中观测器输出的位置信息估计值与实际值几乎一致,角度信息估计值与实际值略有差异,可以有效保证反馈信息的准确性和可信度,避免因传感器安装、成本等因素带来的问题。因此,可采用所述的观测器代替传感器,将小车、桥架的位置和负载摆动信息反馈给控制器形成闭环控制。
[0111]
综上所述,本发明通过构造广义状态变量,增强位移与摆动状态之间的耦合性,进一步规划过渡平滑的s型轨迹,设计递归滑模控制器以跟踪参考轨迹。本发明可以保障天车快速的运输负载到指定位置,保证运输效率的同时负载摆动幅度被抑制在可控范围内,即无大幅度摆动,有效避免了因负载摆动与周围物体或工作人员相撞的安全事故;此外,当小车和桥架到达目标位置停止运行后,负载基本不发生残余摆动,大大提高了作业效率。
[0112]
与已有的控制方法相比,本发明设计的扩张状态观测器易于工程应用,有效避免了传感器测不了、测不准甚至无法测的弊端;参考轨迹参数和控制器增益相对较少,易于整定,且整定范围广,不受物理条件的约束和限制;从仿真效果中可以看出,本发明有助于改善系统响应性能,提高系统动态品质,提升控制精度以及鲁棒性,具有重要的工程应用价值和潜在的经济效益。
[0113]
以上所述仅为本发明较佳可行的实施例而已,并非因此局限本发明的权利范围,凡运用本发明说明书及附图内容所作的等效变化,均包含于本发明的权利范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
