技术特征:
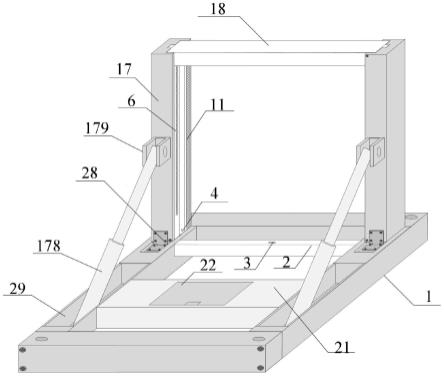
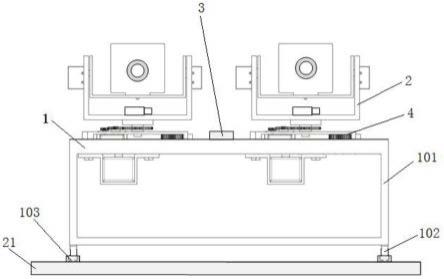
1.基于三线激光平面探测的弹丸着靶位置测试装置,其特征在于,包括:水平框架(1),其内部一端设置有底板i(2),所述矩形底板i(2)顶部设置有激光器i(3);门型框架,其两端分别与所述水平框架(1)两侧铰接;所述门型框架包括横梁(18),所述横梁(18)底部设有一字形排列的光敏管阵列ii(7)、光敏管阵列v(10)和光敏管阵列vii(12),其一侧内壁沿竖直方向并排设置有光敏管阵列i(6)和光敏管阵列vi(11),底部设有激光器ii(4);其另一侧内壁沿竖直方向并排设置有光敏管阵列iii(8)和光敏管阵列iv(9),底部设有激光器iii(5);当所述门型框架垂直所述水平框架(1)时,所述激光器i(3)发射的线激光光束和光敏管阵列i(6)、光敏管阵列ii(7)和光敏管阵列iii(8)在同一个平面内,形成第一探测平面;所述激光器ii(4)发射的线激光光束和光敏管阵列iv(9)和光敏管阵列v(10)在同一个平面内,形成第二探测平面;激光器iii(5)发射的线激光光束和光敏管阵列vi(11)和光敏管阵列vii(12)在同一个平面内,形成第三探测平面;多发弹丸穿过三个探测平面,利用弹丸穿过探测平面瞬间遮挡每层光敏管阵列上光敏管的位置坐标,结合三个激光器发射点坐标建立每个平面的直线方程,并投影在同一平面,利用投影同一平面的多条直线交点获得每一发弹丸的着靶位置。2.根据权利要求1所述的基于三线激光平面探测的弹丸着靶位置测试装置,其特征在于,所述门型框架还包括对称设置在所述水平框架(1)两侧的两组光敏调节组件(17),所述横梁(18)两端分别与两组所述光敏调节组件(17)顶部活动连接;每组所述光敏调节组件(17)均包括一端与所述水平框架(1)侧壁铰接的矩形杆(171),所述矩形杆(171)内侧沿长度方向开设有通槽,所述通槽前侧靠近底部设置有矩形板i(172),所述通槽后侧滑动设置有矩形板ii(173);所述光敏管阵列i(6)和光敏管阵列vi(11)设置在一侧所述矩形板i(172)外侧,所述激光器ii(4)设置在一侧所述矩形板i(172)底部;一侧所述矩形板ii(173)靠近所述矩形板i(172)一侧设有用于加长所述光敏管阵列i(6)和光敏管阵列vi(11)的光敏管阵列i加长阵列(13)和光敏管阵列vi加长阵列(16);所述光敏管阵列iii(8)和光敏管阵列iv(9)设置在另一侧所述矩形板i(172)外侧,所述激光器iii(5)设置在另一侧所述矩形板i(172)底部,另一侧所述矩形板ii(173)靠近所述矩形板i(172)一侧设有用于加长所述光敏管阵列iii(8)和光敏管阵列iv(9)的光敏管阵列iii加长阵列(14)和光敏管阵列iv加长阵列(15)。3.根据权利要求2所述的基于三线激光平面探测的弹丸着靶位置测试装置,其特征在于,所述矩形杆(171)具有腔体,所述矩形板ii(173)的横截面为凸型,所述的矩形杆(171)的通槽内壁两侧沿长度开设有与所述矩形板ii(173)两侧匹配的滑槽i,所述通槽后壁沿长度开设有与所述矩形板ii(173)的竖楞配合的滑槽ii,所述矩形板ii(173)的竖楞后壁沿长度方向开设有t型的的限位槽(30);所述矩形板ii(173)的竖楞一侧设置有齿条(174),所述矩形杆(171)内设置有驱动电机(175)和直线伸缩推杆电机(176),所述驱动电机(175)的输出轴连接有与所述齿条(174)啮合的齿轮(177);所述直线伸缩推杆电机(176)的推杆端部设置有推盘,所述直线伸缩推杆电机(176)的推杆穿过所述限位槽(30)使得所述推盘卡接在所述限位槽(30)内。
4.根据权利要求3所述的基于三线激光平面探测的弹丸着靶位置测试装置,其特征在于,所述横梁(18)底部沿长度方向开设有滑槽iii,所述矩形板i(172)和矩形板ii(173)顶部均设置有与所述滑槽iii配合的凸块(19);当所述矩形板ii(173)位于所述通槽内时,所述矩形板i(172)的凸块(19)卡入所述滑槽iii内,当所述矩形板ii(173)上升至所述矩形板i(172)上方时,所述矩形板ii(173)的凸块(19)卡入所述滑槽iii内。5.根据权利要求2所述的基于三线激光平面探测的弹丸着靶位置测试装置,其特征在于,两个所述矩形杆(171)一侧通过合页(28)与所述水平框架(1)的侧壁铰接,所述水平框架(1)四角均开设有调节通孔,每个所述调节通孔内均设置有调平模块(20)。6.根据权利要求5所述的基于三线激光平面探测的弹丸着靶位置测试装置,其特征在于,每组所述光敏调节组件(17)还包括电动伸缩杆(178),所述水平框架(1)的侧壁上开设有放置槽(29),所述电动伸缩杆(178)与所述放置槽(29)远离所述水平框架(1)的一端铰接,所述电动伸缩杆(178)的伸缩端通过u形连接件(179)形连接件与所述水平框架(1)的矩形杆(171)铰接。7.根据权利要求2所述的基于三线激光平面探测的弹丸着靶位置测试装置,其特征在于,所述水平框架(1)内部另一端设置有底板ii(21)和控制模块(22),所述控制模块(22)包括设置在所述底板ii(21)上的盒体(23)及设置在盒体(23)内部的设有电源模块(24)、信号处理模块(25)、控制器(26)和数据传输模块(27);所述电源模块(24)为测试装置供电,所述信号处理模块(25)采集与处理所有光敏管阵列中光敏管的信号;所述控制器(26)控制所述电动伸缩杆(178)的伸缩,以及调平模块(20)的高低,实现框架结构的尺寸大小以及其与地面的垂直度;所述数据传输模块(27)将处理以后的信号发送给远程接收站。8.一种根据权利要求2至7任一项所述的基于三线激光平面探测的弹丸着靶位置测试装置的测试方法,所述光敏管阵列i(6)、光敏管阵列ii(7)和光敏管阵列iii(8)构成第一组光敏管接收阵列,所述光敏管阵列iv(9)和光敏管阵列v(10)构成第二组光敏管接收阵列,所述光敏管阵列vi(11)和光敏管阵列vii(12)构成第三组光敏管接收阵列,其特征在于,包括以下步骤:定义光敏管阵列的编号及三个探测平面的坐标系;以第一探测平面中的光敏管阵列i(6)所在直线与其对应的矩形板i(172)底部的相交处为坐标原点o0,定义平行于水平地面为x0轴,且与探测平面重合,探测平面所在方向为o0x0轴正方向;y0轴与x0轴垂直,且垂直向上方向为o0y0轴正方向,建立直角坐标系o0x0y0;以第二探测平面中的激光器ii(4)发射位置为坐标原点o1,定义平行于水平地面为x1轴,且与探测平面重合,探测平面所在方向为o1x1轴正方向;y1轴与x1轴垂直,且垂直向上方向为o1y1轴正方向,建立直角坐标系o1x1y1;第三探测平面中的光敏管阵列vi(11)中编号为1的光敏管所在位置为坐标原点o2,定义平行于水平地面为x2轴,且与探测平面重合,探测平面所在方向为o2x2轴正方向;y2轴与x2轴垂直,且垂直向上方向为o2y2轴正方向,建立直角坐标系o2x2y2;建立光敏管中心位置坐标与激光器发射点坐标的直线方程:根据激光器i(3)发射点a0与第一组光敏管接收阵列中被遮挡光敏管中心点a建立直线方程a0a,根据激光器ii(4)发射点b0与第二组光敏管接收阵列中被遮挡光敏管中心点b建立直线方程b0b,根据激光器iii(5)发射点c0与第三组光敏管接收阵列中被遮挡光敏管中心点
c0建立直线方程c0c;激光器i(3)发射点a0的坐标为激光器ii(4)发射点b0的坐标为(0,0),激光器iii(5)发射点c0的坐标为(l,0);第一组光敏管接收阵列中被遮挡光敏管中心点a的坐标为(x
a
,y
a
),第二组光敏管接收阵列中被遮挡光敏管中心点b的坐标为(x
b
,y
b
),第三组光敏管接收阵列中被遮挡光敏管中心点c的坐标为(x
c
,y
c
),探测平面的宽度为l;其中,为第一探测平面中为直线方程a0a表达式,为直线方程b0b的表达式,为直线方程c0c的表达式;当多发弹丸到达探测平面时,弹丸遮挡三个激光器的激光光束入射到三层探测平面中的光敏管接收阵列的光束,使得三层探测平面中分别有多段光敏管感应到激光能量迅速减少,通过信号处理模块(25)对弹丸穿过探测平面时刻的信号状态进行采集与处理,结合已编号光敏管的规则,得到第一层探测平面光敏管接收阵列中多段被遮挡光敏管中心点坐标a1(x
a1
,y
a1
)、a2(x
a2
,y
a2
)、
…
、a
i
(x
ai
,y
ai
),第二层探测平面光敏管接收阵列中多段被遮挡光敏管中心点坐标b1(x
b1
,y
b1
)、b2(x
b2
,y
b2
)、
…
、b
i
(x
bi
,y
bi
),第三层探测平面光敏管接收阵列中多段被遮挡光敏管中心点坐标c1(x
c1
,y
c1
)、c2(x
c2
,y
c2
)、
…
、c
i
(x
ci
,y
ci
);其中,i为弹丸数量;分别将三层探测平面光敏管接收阵列被遮挡光敏管中心点坐标分别带入公式(1)中,在每个探测面所在的直角坐标系中可分别建立多个直线方程,将直角坐标系o1x1y1和直角坐标系o2x2y2中的直线投影到直角坐标系o0x0y0中,在直角坐标系o0x0y0中,由三根直线相交的点为弹丸的着靶位置。9.根据权利要求8所述的基于三线激光平面探测的弹丸着靶位置测试方法,其特征在于,所述光敏管阵列的编号方式为:若未加长探测靶面,则第一探测平面中从光敏管阵列i(6)底端开始按照顺时针方向编号为1~2m n,第二探测平面中从光敏管阵列iv(9)底端开始按照逆时针方向编号为1~2n,第三探测平面中从光敏管阵列vi(11)底端开始按照顺时针方向编号为1~2n;若加长探测靶面,则第一探测平面中从光敏管阵列i(6)底端开始按照顺时针方向编号为1~2m 3n,第二探测平面中从光敏管阵列iv(9)底端开始按照逆时针方向编号为1~3n,第三探测平面中从光敏管阵列vi(11)底端开始按照顺时针方向编号为1~3n。
技术总结
本发明提供了基于三线激光平面探测的弹丸着靶位置测试装置和方法,属于兵器靶场光电测试领域,水平框架的内部一端设置有底板I,矩形底板I顶部设置有激光器I;门型框架两端分别与水平框架两侧铰接;门型框架的横梁底部设有光敏管阵列II、光敏管阵列V和光敏管阵列VII,其一侧内壁竖向并排设置有光敏管阵列I和光敏管阵列VI,底部设有激光器II;其另一侧内壁竖向并排设置有光敏管阵列III和光敏管阵列IV,底部设有激光器III。该装置可对多发弹丸进行精确识别并得到多弹丸着靶位置信息,并可进行远程操控;测试区域可调整,形成的大靶面可用于测试多发弹丸的位置参数,解决了现有测试方法对于多发弹丸相互遮挡难以测试的问题。法对于多发弹丸相互遮挡难以测试的问题。法对于多发弹丸相互遮挡难以测试的问题。
技术研发人员:张晓倩 李翰山
受保护的技术使用者:西安工业大学
技术研发日:2022.06.15
技术公布日:2022/9/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。