1.本发明属于汽车动力布置装置技术领域,涉及一种分布式并列双电机及减速器布置装置。
背景技术:
2.电动汽车与传统汽车相比,驱动系统结构发生了极大的改变。根据驱动系统结构布置的不同,电动汽车分为两种:单电机集中驱动型式电动汽车(简称集中驱动式电动汽车)和多电机分布驱动型式电动汽车(简称分布式驱动电动汽车)。其中,传统的分布式驱动按照动力系统的组织构型不同分为两种:电机与减速器组合驱动型式,轮边电机或轮毂电机驱动型式,轮边电机驱动型式是将驱动电机安放于副车架上,驱动轮从其对应侧输出轴获取驱动力。轮毂电机驱动型式是将电机和减速机构直接放在轮辋中,取消了半轴、万向节、差速器、减速器等传动部件。
3.目前,针对分布式驱动电动汽车驱动系统失效,以基于规则分配的被动容错控制为主,适用于应对预先设定的驱动失效模式,仅对特定故障具有鲁棒性,分布式电动汽车驱动系统主动容错控制尚处于研究阶段,许多研究亟待进一步深化。在电机与减速器组合驱动型式中,电机与固定速比减速器连接,通过半轴实现对应侧车轮的驱动,由于电机和减速箱布置在车架上,这种形式往往在现有车身结构的基础上,稍加改动,即推广应用。存在电机、减速器布置时空间利用率低,结构复杂,系统质量大、不易拆装布置,难以更换、容错率较低等问题。
技术实现要素:
4.本发明目的是提供一种分布式并列双电机及减速器布置装置,以解决现有技术中存在电机和减速器布置方式中存在的空间利用率低,结构复杂,系统质量大、难以更换、容错率较低等问题。
5.为了实现以上目的,一方面,本发明提供了一种高容错分布式并列双电机及减速器布置装置,包括两个相同的安装组,每个安装组包括安装架、4个三角式固定片和4个减速器吊耳;其中:
6.所述安装架包括后固定架和前固定架,后固定架和前固定架的中心处分别安装电机后安装夹和电机前安装夹,后固定架上相对于电机后安装夹左右对称安装有减速器右后安装夹和减速器左后安装夹,前固定架相对于电机前安装夹左右对称安装有减速器左前安装夹和减速器右前安装夹;
7.所述4个三角式电机固定片分别为右后三角式电机固定片、左后三角式电机固定片、右前三角式电机固定片和左前三角式电机固定片,它们结构相同,且右后三角式电机固定片、左后三角式电机固定片并列设置组成后固定片组,右前三角式电机固定片和左前三角式电机固定片并列设置组成前固定片组;
8.所述4个减速器吊耳分别为左前吊耳、左后吊耳、右前吊耳和右后吊耳,左前吊耳
和右前吊耳均包括前吊耳架和其上连接的前吊耳连接片,前吊耳连接片内穿过吊耳胶壳套,左前吊耳、右前吊耳的吊耳胶壳套分别通过一吊耳固定螺栓对应固定在减速器左前安装夹和减速器右前安装夹内;左后吊耳和右后吊耳均包括后吊耳架和其上连接的后吊耳连接片,后吊耳连接片内穿过吊耳胶壳套,左后吊耳和右后吊耳的吊耳胶壳套分别通过一吊耳固定螺栓对应固定在减速器左后安装夹和减速器右后安装夹内。
9.进一步的,所述三角式电机固定片为带有三个角的片体,片体的三个角的位置处分别设有第一孔、第二孔和第三孔;后固定片组的两个片体的第一孔内共同安装一电机胶壳套,电机胶壳套通过第一螺栓安装在电机后安装夹内,前固定片组也同样安装在电机前安装夹内;后固定片组的两个片体的第二孔内共同安装一电机固定套筒,电机固定套筒通过第二螺栓固定在一对电机基座之间,后固定片组的两个片体的第三孔、前固定片组的两个片体的第二孔、第三孔也同样固定在该对基座之间;两个电机对称安装在该对电机基座的左、右两侧,从而固定了电机在安装架上的位置。
10.进一步的,两个减速器对称安装在所述两个电机共同的左、右两侧,减速器通过吊耳架螺栓固定在减速器吊耳上,从而在固定了减速器在对应安装架上的位置。
11.进一步的,所述三角式电机固定片的中部设有至少一个孔。
12.进一步的,所述三角式电机固定片的中部由上向下设有第四孔和第五孔。
13.进一步的,所述电机固定套筒为两端薄中间厚的阶梯状套筒,其两端外壁与三角式电机固定片的第二孔的内径间隙配合,其中部外径大于第二孔内径。
14.进一步的,还包括4个电机控制器,每个电机控制器分别连接控制一个车轮对应的电机,且4个电机控制器均与整车控制器相连。
15.另一方面,本发明还提供一种容错控制方法,具体包括如下步骤:
16.步骤1,当汽车正常运行时,整车控制器对车辆行驶状态进行监测,当车辆行驶状态偏离正常范围,判定车辆出现故障,之后向四个电机控制器发送指令,获取电机以及电机控制器的工作状态,获取故障位置,进入步骤2;否则持续监测;
17.步骤2,判断故障类型,当故障类型判定为完全失控时,进一步确定工况,执行步骤3;当故障类型判定为部分失控时,进一步确定工况,执行步骤3或者执行步骤5;其中:
18.所述完全失控是指以下3种情况的至少一种发生:(1)车轮转速不可控;(2)转矩不可控;(3)转速转矩均不可控;
19.所述部分失控是指以下2种情况的至少一种发生:(1)失去部分转速或转矩,但整体可控;(2)失去对转速或转矩的控制,但可以正常空转;
20.上述故障类型对应的工况分为两大类:第一大类:单电机失效,包括左前、右前、左后、右后,第二大类:双电机失效,包括异侧双电机失效、前轴双电机失效、后轴双电机失效。
21.步骤3,根据步骤2确定的工况,采用直接排除故障环节法进行容错控制,包括如下子步骤:
22.步骤31,如果步骤2确定的工况属于第二大类情况即双电机失效,则采用直接断开故障部分法进行处理;如果步骤2确定的工况属于第一大类情况即单电机失效,则可以采用直接断开故障部分法或者故障转换控制法进行处理;其中:
23.所述直接断开故障部分法的具体操作如下:对确定工况中故障部分对应的电机进行如下三种处理方式中任一方式进行处理:(1)将故障部分对应的电机和减速器拆除;(2)
将故障部分对应的电机断电;(3)利用故障部分对应的电机控制器断开故障车轮的电机动力,使得车轮随车空转;
24.所述故障转换控制法的具体操作如下:对确定工况中故障部分对应的电机以及与其同轴的另一侧对应的电机进行如下三种处理方式中任一方式进行处理:(1)将故障部分对应的电机和减速器以及与其同轴的另一侧的电机和减速器均拆除;(2)将故障部分对应的电机以及与其同轴的另一侧的电机均进行断电;(3)分别利用对应的电机控制器断开故障车轮的电机以及与其同轴的另一侧对应的电机的动力,使得两个电机对应的车轮均随车空转;
25.步骤32,整车控制器mcu采用提前标定的容错参数发送给各电机控制器,由电机控制器控制对应电机从而控制车轮动力,执行步骤4;
26.步骤4,对车辆横摆角速度、侧向车速、纵向速度、侧向速度、侧向加速度相对于期望值进行比较检验,若在误差允许范围内,则容错控制成功,若误差较大,则返回步骤2;
27.步骤5,采用利用故障环节剩余效能的实时容错控制,具体是:利用模型预测控制理论,构建整车运动预测控制模型,以改善车辆的运动跟踪性为目标,考虑执行器约束,利用二次规划方法,进行预测控制滚动时域优化,求解车体控制力的最优控制增量,并进一步得到使车辆达到期望状态时的整车纵向总力、侧向总力以及总横摆力矩,实现实时容错的控制目标;执行步骤4。
28.进一步的,所述步骤1中,整车控制器基于采集到的侧向速度、侧向加速度、横摆角速度、横摆力矩以及can总线通讯数据对车辆行驶状态进行监测。
29.相较于现有技术,本发明具有如下技术效果:
30.1、对比现有的多电机分布驱动型式电动汽车电机、减速器布置方法,利用本发明的装置可以实现采用独创的“四分之二”布置方法,将2个电机利用同一组三角式固定片固连在固定架上,从而将4个独立控制的电机分为前、后两个独立的安装组,降低安装难度、提升电机、减速器安装组的接近性的同时降低了安装装置整体的质量。
31.2、将两个电机和两个电机减速器组成的电机、减速器组固连在前后固定架上,整体成简单对称结构,以保证质心位置。
32.3、将电机及减速器的安装结构简单化。电机及减速器直接与固定架安装夹上安装的外三角式固定片利用胶壳套和吊耳以及连接片栓接,栓接的形式在保证了连接的可靠性的同时使电机以及减速器安装结构简单化、拆装方式轻松化。
33.4、将安装结构空间的利用高效化。通过采用独创的对称双三角式固定片同时对称固定两个电机、对称安装减速器的方法,简化安装装置,保证质心位置,优化布置空间,改善提高了现有的电机及减速器的空间利用率,使得空间利用高效化。
34.5、安装结构系统轻量化。采用固定架栓接三角式固定片的方式布置电机及减速器,优化了整个安装系统的质量分配,使得机构整体质量降低,系统轻量化水平得到提高。
35.6、提高安装结构的接近性。固定架与三角式固定片利用胶壳套栓接的固定方式,使得电机及减速器的拆装工作轻松化,提升了整个系统的接近性,使得发生故障时的更换工作变得快速化。
36.7、采用双层闭环容错逻辑。针对分布式纯电动汽车多电机动力冗余的情况下,多执行器冗余结构耦合会产生各子系统间的干扰或冲突,导致驱动系统失效;时变工况下,驱
动系统经常处于非稳态工作状态,相对于传统燃油车,在可靠性和抗干扰等方面存在明显的劣势,故障更具突发性和隐蔽性,发生概率更高等问题。在本发明的基础上,可以采用容错控制逻辑及容错操作流程,采用控制逻辑和机械排除方法双闭环的形式,提升分布式纯电动汽车的整车容错能力。
附图说明
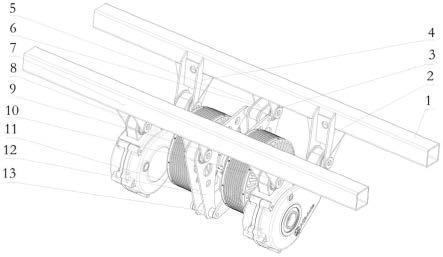
37.图1是本发明的装置的装配后效果图;
38.图2是无固定架和安装夹的效果图;
39.图3是主视示意图;
40.图4是侧视示意图;
41.图5是固定架效果图;
42.图6是三角式固定片效果图;
43.图7是减速器吊耳效果图;
44.图8是本发明的控制结构图;
45.图9是容错控制的工况分类图;
46.图10是本发明的容错控制方法流程图。
47.图1中,1、后固定架,2、减速器左后安装夹,3、电机后安装夹,4、减速器右后安装夹,5、右后三角式电机固定片,6、左后三角式电机固定片,7、前固定架,8、减速器右前安装夹,9、电机前安装夹,10、减速器左前安装夹,11、右前三角式电机固定片,12、左前三角式电机固定片,13、电机固定套筒;
48.图2中,14、后吊耳架,15、后吊耳连接片,16、减速器吊耳胶壳套,17、电机胶壳套,18、前吊耳架,19、前吊耳连接片;
49.图4中,20、吊耳架螺栓,21、电机固定螺栓,22、吊耳固定螺栓,23、三角式电机固定片螺栓;
50.图8中,整车控制器模块集成了容错控制逻辑及容错操作流程图;
具体实施方式
51.以下给出本发明的具体实施方式,需要说明的是本发明并不局限于以下具体实施例,凡在本技术技术方案基础上做的等同变换均落入本发明的保护范围。
52.本发明的高容错分布式并列双电机及减速器布置装置,包括两个相同的安装组、四个电机和四个减速器,每个安装组对应安装两个电机和两个减速器;每个安装组包括安装架、4个三角式固定片和4个减速器吊耳。其中:
53.如图5所示,安装架包括后固定架(1)和前固定架(7),后固定架(1)和前固定架(7)的中心处分别安装电机后安装夹(3)和电机前安装夹(9),后固定架(1)上相对于电机后安装夹(3)左右对称安装有减速器右后安装夹(4)和减速器左后安装夹(2),前固定架(7)相对于电机前安装夹(9)左右对称安装有减速器左前安装夹(10)和减速器右前安装夹(8)。其中,电机后安装夹(3)和电机前安装夹(9)用于通过三角式电机固定片以固定电机位置;减速器左后安装夹(2)、减速器右后安装夹(4)、减速器右前安装夹(8)、减速器左前安装夹(10)用于夹持减速器吊耳以固定减速器。
54.如图1、2、3、6所示,4个三角式电机固定片分别为右后三角式电机固定片(5)、左后三角式电机固定片(6)、右前三角式电机固定片(11)和左前三角式电机固定片(12),它们结构相同,且右后三角式电机固定片(5)、左后三角式电机固定片(6)并列设置组成后固定片组,右前三角式电机固定片(11)和左前三角式电机固定片(12)并列设置组成前固定片组,形成两个固定片组;三角式电机固定片为带有三个角的片体,片体的三个角的位置处分别设有第一孔、第二孔和第三孔;后固定片组的两个片体的第一孔内共同安装一电机胶壳套(17),电机胶壳套(17)通过第一螺栓(23)安装在电机后安装夹(3)内,前固定片组也同样安装在电机前安装夹(9)内;后固定片组的两个片体的第二孔内共同安装一电机固定套筒(13),电机固定套筒(13)通过第二螺栓(21)固定在一对电机基座之间,后固定片组的两个片体的第三孔、前固定片组的两个片体的第二孔、第三孔也同样固定在该对基座之间;两个电机对称安装在该对电机基座的左、右两侧,从而固定了电机在安装架上的位置。
55.优选的,三角式电机固定片的中部设有至少一个孔(本实施例中由上向下设有第四孔和第五孔),用于减少固定片的质量。
56.如图3、4、7所示,4个减速器吊耳分别为左前吊耳、左后吊耳、右前吊耳和右后吊耳,左前吊耳和右前吊耳均包括前吊耳架(18)和其上连接的前吊耳连接片(19),前吊耳连接片(19)内穿过吊耳胶壳套(16),左前吊耳、右前吊耳的吊耳胶壳套(16)分别通过一吊耳固定螺栓(22)对应固定在减速器左前安装夹(10)和减速器右前安装夹(8)内;左后吊耳、和右后吊耳均包括后吊耳架(14)和其上连接的后吊耳连接片(15),后吊耳连接片(15)内穿过吊耳胶壳套(16),左后吊耳、和右后吊耳的吊耳胶壳套(16)分别通过一吊耳固定螺栓(22)对应固定在减速器左后安装夹(1)和减速器右后安装夹(4)内,两个减速器对称安装在两个电机共同的左、右两侧,减速器通过吊耳架螺栓(21)固定在减速器吊耳上,从而在固定了减速器在安装架上的位置。每个电机的输出轴连接其对应的减速器的输入轴,减速器输出轴连接汽车半轴,汽车半轴连接对应的车轮。
57.优选的,电机固定套筒(13)为两端薄中间厚的阶梯状套筒,其两端外壁与三角式电机固定片的第二孔的内径间隙配合,其中部外径大于第二孔内径,这样的结构设计下,后固定片组的两个片体能够通过电机固定套筒(13)保持间隙,同理,前固定片组的两个片体也能通过电机固定套筒(13)保持间隙。
58.本发明实际使用时,将安装架直接焊接在车架上,电机后安装夹(3)、电机前安装夹(9)、减速器左后安装夹(2)、减速器右后安装夹(4)、减速器右前安装夹(8)、减速器左前安装夹分别焊接在安装架上。
59.以上本发明的布置装置,具有如下优点:
60.面对传统的电机减速器组合驱动中质心位置的保证问题,利用本发明的装置,可以采用独创的“四分之二”布置方法,将4个独立控制的电机分为前、后两个相同且独立的安装组,每个安装组中的2个电机利用三角式固定片安装在固定架上,如图1所示,有效降低了安装难度、提升电机、减速器安装组的接近性的同时降低了安装装置整体的质量。本发明采用独创的三角式电机固定片,在电机胶壳套17、第一螺栓23的配合下,栓接在电机安装夹上,以及安装架与安装夹相结合的形式,将两个电机和两个单机减速器固连在后固定架1和前固定架7上,整体成简单对称结构,以保证质心位置。
61.面对传统的电机减速器组合驱动中整体配合结构复杂的问题,本发明将电机及减
速器结构简单化,电机与减速器之间由电机输出轴连接减速器输入轴,减速器输出轴连接半轴;电机及减速器直接与固定架安装夹上安装的外三角式固定片利用胶壳套和吊耳以及连接片栓接,使得电机以及减速器结构简单化。
62.面对传统的电机减速器组合驱动中空间利用不足的问题,通过采用对称的双三角的固定片组同时对称固定两个电机、对称安装减速器的方法,简化安装装置、保证质心位置、优化布置空间,改善提高了现有的电机及减速器的空间利用率,使得空间利用高效化。
63.面对传统的电机减速器组合驱动中质量过高的问题,采用固定架栓接三角式固定片的方式布置电机及减速器,优化了系统的质量分配,使得机构整体质量降低,系统轻量化水平得到提高。
64.面对传统的电机减速器组合驱动中电机减速器接近性差的问题固定架与三角式固定片利用胶壳套栓接的固定方式,使得电机及减速器的拆装工作轻松化,提升了整个系统的接近性,使得发生故障时的更换工作变得快速化。
65.优选的,如图8所示,本发明的布置装置还包括前后双电机系统控制结构,该结构包括四个电机控制器,其中,每个电机控制器对应控制一台电机,每个电机控制器连接整车控制器(mcu),电机控制器用于采集对应电机的状态信息并将该信息发送给整车控制器,同时用于根据整车控制器的控制指令来控制对应电机;整车控制器根据车辆状态信息和电机状态信息向各个电机控制器发送指令,控制对应电机做出不同响应。
66.如图10所示,本发明基于上述减速器布置装置给出一种容错控制方法具体包括如下步骤:
67.步骤1,当汽车正常运行时,整车控制器基于采集到的侧向速度、侧向加速度、横摆角速度、横摆力矩以及can总线通讯数据对车辆行驶状态进行监测;当采集到的侧向速度、侧向加速度、横摆角速度、横摆力矩等数据偏离正常范围,判定车辆出现故障,之后通过can总线向四个电机控制器发送指令,获取电机以及电机控制器的工作状态,获取故障位置,进入步骤2;否则持续监测。
68.步骤2,判断故障类型,故障类型如图9所示。当故障类型判定为完全失控时,进一步确定工况,执行步骤3;当故障类型判定为部分失控时,进一步确定工况,执行步骤3或者执行步骤5;
69.其中,完全失控是指以下3种情况的至少一种发生:1、车轮转速不可控;2、转矩不可控;3、转速转矩均不可控(即不能正常空转);
70.部分失控是指以下2种情况的至少一种发生:1、失去部分转速或转矩,但整体可控;2、失去对转速或转矩的控制,但可以正常空转;
71.上述故障类型对应的工况分为两大类(包括七个小类):第一大类:单电机失效(包括左前、右前、左后、右后),第二大类:双电机失效(包括异侧双电机失效、前轴双电机失效、后轴双电机失效)。
72.步骤3,根据步骤2确定的工况,采用直接排除故障环节法进行容错控制,包括如下子步骤:
73.步骤31,如果步骤2确定的工况属于第二大类情况即双电机失效,则采用直接断开故障部分法进行处理;如果步骤2确定的工况属于第一大类情况即单电机失效,则可以采用直接断开故障部分法或者故障转换控制法进行处理(优选故障转换控制法);
74.其中,直接断开故障部分法具体操作如下:对确定工况中故障部分对应的电机进行如下三种处理方式中任一方式进行处理:(1)将故障部分对应的电机和减速器从本发明的布置装置上拆除;(2)将故障部分对应的电机断电;(3)利用故障部分对应的电机控制器断开故障车轮的电机动力,使得车轮随车空转。
75.故障转换控制法具体操作如下:对确定工况中故障部分对应的电机以及与其同轴的另一侧对应的电机进行如下三种处理方式中任一方式进行处理:(1)将故障部分对应的电机和减速器以及与其同轴的另一侧的电机和减速器均从本发明的布置装置上拆除;(2)将故障部分对应的电机以及与其同轴的另一侧的电机均进行断电;(3)分别利用对应的电机控制器断开故障车轮的电机以及与其同轴的另一侧对应的电机的动力,使得两个电机对应的车轮均随车空转。该控制方式下,能够有效完成容错转化,将复杂的分布式容错控制转化为较为成熟可靠的前驱或后驱控制,保证车辆的安全行驶。
76.步骤32,整车控制器mcu采用提前标定的容错参数发送给各电机控制器,由电机控制器控制对应电机从而控制车轮动力,执行步骤4。
77.步骤3的方式能够减少整车控制器运算量,加快其运算速度,达到容错目标。
78.步骤4,对车辆横摆角速度、侧向车速、纵向速度、侧向速度、侧向加速度相对于期望值进行比较检验,若在误差允许范围内,则容错控制成功,若误差较大,则返回步骤2。
79.步骤5,采用利用故障环节剩余效能的实时容错控制,具体是:利用模型预测控制理论,构建整车运动预测控制模型,以改善车辆的运动跟踪性为目标,考虑执行器约束,利用二次规划方法,进行预测控制滚动时域优化,求解车体控制力的最优控制增量,并进一步得到使车辆达到期望状态时的整车纵向总力、侧向总力以及总横摆力矩,实现实时容错的控制目标;执行步骤4。步骤5的的容错控制能够充分的利用车辆的剩余性能,同时避免人工的参与,使容错更为方便、快捷。
80.综上,针对传统的分布式纯电动汽车多电机动力冗余的情况下,多执行器冗余结构耦合会产生各子系统间的干扰或冲突,导致驱动系统失效;时变工况下,驱动系统经常处于非稳态工作状态,相对于传统燃油车,在可靠性和抗干扰等方面存在明显的劣势,故障更具突发性和隐蔽性,发生概率更高等问题。本发明的方法采用控制逻辑和机械排除方法双闭环的容错逻辑进行控制。提升分布式纯电动汽车的整车容错能力。本发明的容错控制方法综合失效模式容错控制,更易达到容错目标。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
