1.本发明涉及封条生产技术领域,具体涉及一种封条装盒包装系统。
背景技术:
2.集装箱封条为一次性专用锁,其结构一般由锁套和锁芯组成,锁套及锁芯采用金属制作,外包abs材质塑料,锁体为夹簧式结构,锁套和锁芯的表面通常采用热印或激光打引流水号、条形码等信息内容,且锁套和锁芯表面的信息内容必须配置一致且具有唯一性。因封条的产品结构具有特殊性,现市场上封条通常为连体式及分离式注塑两种结构。然而,现有的封条包装设备,具有如下缺点:
3.(1)针对分离式的封条的装盒工艺而言,现有的装盒设备通常采用输送带输送吸塑盒,并依次投放锁套和锁芯后直接输送至纸塑压合设备中封装,此种设备的占用空间较大,锁套和锁芯的投放组装精度差,且每组锁套和锁芯的投放间距不具一致性,存在较大的组装误差;此外,难以保证锁套和锁芯的匹配度,存在错装、漏装等问题;
4.(2)现有的锁套、锁芯打标设备的结构简单,采用单一产品排列打标的方式,极易导致锁套、锁芯的打标位置不具备同一性,且存在漏打、错打和多打的问题,打标效果差,因锁套、锁芯排料精度和定距精度差,而极大程度地影响打标精准度,上料和打标流程的连贯性差,无法适用于大批量打标需求;
5.(3)现有的吸塑盒上料设备通常采用人工分离堆叠的吸塑盒并利用输送带输送至后续设备进行包装加工,上料效率慢,堆叠的吸塑盒分离效果差,且吸塑盒的上料定向性差,极大程度地影响后续封条的包装效果和精准度。
技术实现要素:
6.为了克服上述技术问题,本发明公开了一种封条装盒包装系统。
7.本发明为实现上述目的所采用的技术方案是:
8.一种封条装盒包装系统,其包括:
9.装盒组装设备,其包括吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位;
10.吸塑盒上料设备,对应所述吸塑盒入料工位设置;
11.锁套排料打标检测设备,对应所述锁套装盒工位设置;
12.锁芯定距打标检测设备,对应所述锁芯装盒工位设置;
13.纸塑压合设备,对应所述产品出料工位设置。
14.上述的封条装盒包装系统,其中依次经过所述吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位设置有承载转盘装置;
15.于所述锁套装盒工位对应所述承载转盘装置配套设置有锁套翻转装置和第二锁套拾取装置;
16.于所述锁芯装盒工位对应所述承载转盘装置配套设置有锁芯翻转装置和第二锁
芯拾取装置;
17.于所述产品出料工位对应所述承载转盘装置设置有产品移载装置,所述产品移载装置对应所述纸塑压合设备设置。
18.上述的封条装盒包装系统,其中所述吸塑盒上料设备包括并列设置的第一堆叠工位和第二堆叠工位,连接所述第一堆叠工位和所述第二堆叠工位设置有第三输送装置,于所述第三输送装置上活动设置有料仓装置;
19.于所述第一堆叠工位和所述第二堆叠工位之间设置有第三上料工位,于所述第三上料工位对应所述料仓装置设置有吸取移载装置和吸塑盒顶升装置,所述吸取移载装置往返于所述第三上料工位和所述吸塑盒入料工位。
20.上述的封条装盒包装系统,其中所述料仓装置包括并列设置的第一料仓和第二料仓,所述第一料仓往返于所述第一堆叠工位和所述第三上料工位,所述第二料仓往返于所述第三上料工位和所述第二堆叠工位;
21.所述吸塑盒顶升装置包括若干组按间隔距离水平设置的升降板;
22.所述第一料仓包括承载底板、若干组纵向设置于所述承载底板上的第一导向杆,相邻的所述第一导向杆之间形成吸塑盒导向腔,于所述吸塑盒导向腔中设置有若干组吸塑盒定位座,于相邻的所述吸塑盒定位座之间贯穿所述承载底板设置有升降避让槽,所述升降板活动穿置于所述升降避让槽中。
23.上述的封条装盒包装系统,其中所述锁套排料打标检测设备包括依次设置的锁套上料单元、锁套排料单元、第一移载定位单元和第一打标检测单元;
24.所述第一打标检测单元包括锁套入料工位、第一激光打标工位、第一视觉检测工位和第一良品取料工位,依次经过所述锁套入料工位、第一激光打标工位、第一视觉检测工位和第一良品取料工位设置有第一输送装置,所述锁套翻转装置对应所述第一良品取料工位设置。
25.上述的封条装盒包装系统,其中所述锁套上料单元包括上下对应设置的储料仓和振动盘,于所述振动盘的出料端设置有第一整理料道;
26.所述锁套排料单元包括第一上料工位和第一排料工位,依次经过所述第一上料工位和第一排料工位设置有第一横移装置,于所述第一横移装置上活动设置有第一分料定距装置,所述第一分料定距装置往返于所述第一上料工位和第一排料工位,所述第一分料定距装置按间隔距离并列设置有若干组第一锁套定距槽,所述第一锁套定距槽对应所述第一整理料道设置;
27.所述第一移载定位单元往返于所述第一排料工位和所述锁套入料工位。
28.上述的封条装盒包装系统,其中所述锁芯定距打标检测设备包括依次设置的锁芯推料单元、锁芯排料单元、第二移载定位单元和第二打标检测单元;
29.所述第二打标检测单元包括锁芯入料工位、第二激光打标工位、第二视觉检测工位和第二良品取料工位,依次经过所述锁芯入料工位、第二激光打标工位、第二视觉检测工位和第二良品取料工位设置有第二输送装置,所述锁芯翻转装置对应所述第二良品取料工位设置。
30.上述的封条装盒包装系统,其中所述锁芯排料单元包括第二上料工位和第二排料工位,依次经过所述第二上料工位和第二排料工位设置有第三横移装置,于所述第三横移
装置上活动设置有第二分料定距装置,所述第二分料定距装置往返于所述第二上料工位和第二排料工位,所述第二分料定距装置按间隔距离并列设置有若干组第一锁芯定距槽,所述第一锁芯定距槽对应所述第二整理料道设置;
31.所述第二移载定位单元包括第四横移装置、活动设置于所述第四横移装置上的第二升降装置、及固定设置于所述第二升降装置上的第一锁芯拾取装置,所述第一锁芯拾取装置往返于所述第二排料工位和所述锁芯入料工位之间。
32.上述的封条装盒包装系统,其中所述锁套翻转装置包括第一翻转支架、纵向设置于所述第一翻转支架上的第四升降装置、活动设置于所述第四升降装置上的第一旋转装置、及设置于所述第一旋转装置上的第一翻转固持装置;
33.所述第一翻转固持装置包括第四拾取座、若干组按间隔距离并列设置于所述第四拾取座上的第三吸取头,所述第三吸取头对应所述承载转盘装置设置。
34.上述的封条装盒包装系统,其中所述产品移载装置包括第三机械臂、活动设置于所述第三机械臂上的第六拾取座、及若干组按间隔距离并列设置于所述第六拾取座上的第四吸取头,所述第四吸取头对应所述承载转盘装置设置。
35.本发明的有益效果包括以下几点:
36.(1)基于具体划分所述装盒组装设备为吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位,并对应各工位相应设置所述吸塑盒上料设备、锁套排料打标检测设备、锁芯定距打标检测设备和纸塑压合设备,实现有机连接个设备以完成吸塑盒分离入料、打标锁套定距装盒、打标锁芯定距装盒和封条产品压合出料的工序,工序流程连贯性和自动化程度高;
37.(2)所述装盒组装设备利用所述承载转盘装置依次流转于所述吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位,自动化完成吸塑盒入料、锁套装盒、锁芯装盒和产品出料的工序,组装工序连贯性强,设备占用空间小,提高装盒组装的高效性和有序性;
38.(3)所述锁套排料打标检测设备依次设置所述锁套上料单元、锁套排料单元和第一打标检测单元,并利用所述第一移载定位单元定向连接所述锁套排料单元和第一打标检测单元,可全自动化地实现锁套上料、定距排料、激光打标和外观检测工序,提高锁套定点打标的高精度性和高效性,避免出现滞料、卡顿的问题而影响锁套打标效率;
39.(4)所述锁芯定距打标检测设备依次设置所述锁芯推料单元、锁芯排料单元和第二打标检测单元,并利用所述第二移载定位单元定向连接所述锁芯排料单元和第二打标检测单元,可全自动化地实现锁芯上料、定距排料、激光打标和外观检测的工序,提高锁芯定点打标的高精度性和高效性,避免出现滞料、卡顿的问题而影响锁芯打标效率;
40.(5)所述吸塑盒上料设备配合采用所述第三输送装置和所述料仓装置,实现及时切换空载的料仓,保证吸塑盒持续上料不停工,并且配合设置所述吸塑盒顶升装置,在移取顶层吸塑盒后及时顶升堆叠的吸塑盒,以优化吸塑盒的上料连贯性,提高了吸塑盒有序上料的效率。
附图说明
41.下面结合附图和实施例对本发明进一步说明。
42.图1为本发明的结构俯视示意图;
43.图2为本发明中装盒组装设备的立体示意图;
44.图3为本发明中承载转盘装置的俯视示意图;
45.图4为本发明中锁套翻转装置的立体示意图;
46.图5为本发明中第二锁套拾取装置的立体示意图;
47.图6为本发明中分距移载装置的立体示意图;
48.图7为本发明中锁芯翻转装置的立体示意图;
49.图8为本发明中第二锁芯拾取装置的立体示意图;
50.图9为本发明中产品移载装置的立体示意图;
51.图10为本发明中锁套排料打标检测设备的立体示意图;
52.图11为本发明中锁套上料单元的左视示意图;
53.图12为本发明中锁套排料单元的立体示意图;
54.图13为本发明中第一移载定位单元的立体示意图;
55.图14为本发明中第一打标检测单元的立体示意图;
56.图15为本发明中锁芯定距打标检测设备的立体示意图;
57.图16为本发明中锁芯推料单元的立体示意图;
58.图17为本发明中锁芯排料单元的立体示意图;
59.图18为本发明中第二移载定位单元的立体示意图;
60.图19为本发明中第二打标检测单元的立体示意图;
61.图20为本发明中吸塑盒上料设备的立体示意图;
62.图21为本发明中第三输送装置和料仓装置的正视示意图;
63.图22为本发明中料仓装置的立体示意图;
64.图23为本发明中吸取移载装置的立体示意图;
65.图24为本发明中吸塑盒顶升装置的立体示意图。
具体实施方式
66.下面通过具体实施例对本发明作进一步说明,以使本发明技术方案更易于理解、掌握,而非对本发明进行限制。
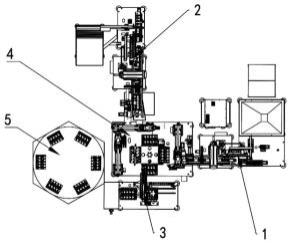
67.实施例:参见图1,本实施例提供的一种封条装盒包装系统,其包括:
68.装盒组装设备4,其包括吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位;
69.吸塑盒上料设备3,对应所述吸塑盒入料工位设置;
70.锁套排料打标检测设备1,对应所述锁套装盒工位设置;
71.锁芯定距打标检测设备2,对应所述锁芯装盒工位设置;
72.纸塑压合设备5,对应所述产品出料工位设置。
73.较佳地,参见图2至图9,所述装盒组装设备4包括吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位,依次经过所述吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位设置有承载转盘装置41;
74.于所述锁套装盒工位对应所述承载转盘装置41配套设置有锁套翻转装置42 和第
二锁套拾取装置43;
75.于所述锁芯装盒工位对应所述承载转盘装置41配套设置有锁芯翻转装置44 和第二锁芯拾取装置45;
76.于所述产品出料工位对应所述承载转盘装置41设置有产品移载装置46。
77.具体地,利用所述承载转盘装置41依次流转于所述吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位,自动化完成吸塑盒入料、锁套装盒、锁芯装盒和产品出料的工序,组装工序连贯性强,设备占用空间小,提高装盒组装的高效性和有序性;其中,配合设置所述锁套翻转装置42和所述第二锁套拾取装置43、所述锁芯翻转装置44和所述第二锁芯拾取装置45,确保锁套、锁芯翻转至指定角度和位置后精准拾取放置于吸塑盒中,实现定距定量投放组装,避免因人工组装误差大而导致装盒匹配性和精度差的问题,并且通过所述产品移载装置46移载至纸塑压合设备5中以压合吸塑盒以完成装盒包装操作,装置自动化程度高。
78.较佳地,所述承载转盘装置41包括第一旋转机构、及水平设置于所述第一旋转机构上的旋转转盘411,于所述旋转转盘411上至少设置有四组组装承载座 412,所述组装承载座412在所述第一旋转机构的作用下依次流经所述吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位,所述组装承载座412 至少包括两组吸塑盒定位腔;在本实施例中,所述第一旋转机构配合设置有分割器、减速器和变频马达,当所述变频马达动作时联动所述减速器和所述分割器带动所述旋转转盘411逆向旋转转动,每次旋转90
°
,四组所述组装承载座 412同步旋转,例如驱使一组所述组装承载座412由所述吸塑盒入料工位旋转至所述锁套装盒工位中,便于进一步提高组装精准度。
79.进一步地,贯穿所述旋转转盘411对应所述吸塑盒定位腔设置有第二检测通孔;
80.于所述吸塑盒入料工位对应所述第二检测通孔设置有第六光电开关413,所述第六光电开关413与所述第一旋转机构电性连接;当所述第六光电开关413 检测到所述吸塑盒定位腔中置有吸塑盒时,驱使所述第一旋转机构开始工作,极大程度地提高设备的自动化程度。
81.进一步地,于所述组装承载座412上围绕所述吸塑盒定位腔设置有若干定位柱414,所述定位柱414用于提高吸塑盒于所述吸塑盒定位腔中的定位稳固性和精准性。
82.较佳地,所述锁套翻转装置42包括第一翻转支架、纵向设置于所述第一翻转支架上的第四升降装置421、活动设置于所述第四升降装置421上的第一旋转装置422、及设置于所述第一旋转装置422上的第一翻转固持装置;具体地,所述第四升降装置421可优选为由气缸、电机驱动的装置,所述第一旋转装置422 可优选为旋转气缸等装置;
83.所述第一翻转固持装置包括第四拾取座、若干组按间隔距离并列设置于所述第四拾取座上的第三吸取头423,所述第三吸取头423对应所述吸塑盒定位腔设置,所述第三吸取头423外接有负压发生装置,所述负压发生装置用于当所述第三吸取头423吸取锁套时产生负压。
84.较佳地,所述第二锁套拾取装置43包括第一机械臂431、及活动设置于所述第一机械臂431上的分距移载装置432;所述第一机械臂431具有3个水平回转自由度,可提高所述分距移载装置432于有限空间内的大范围移动范围;
85.所述分距移载装置432包括设置于所述第一机械臂431上的分距座、设置于所述分
距座上的滑轨、及横向设置于所述分距座上的第四气缸433;
86.所述分距座上设置有固定吸附治具434,于所述滑轨上活动设置有若干组活动吸附治具435,所述固定吸附治具434与相邻的所述活动吸附治具435之间设置有第一变距连杆,相邻的两组所述活动吸附治具435之间设置有第二变距连杆,所述第四气缸433与最外侧的所述活动吸附治具435通过传动块传动连接,所述固定吸附治具434和所述活动吸附治具435对应所述吸塑盒定位腔设置;具体地,所述固定吸附治具434和所述活动吸附治具435的结构相同,均包括吸嘴,且所述固定吸附治具434和所述活动吸附治具435外接有负压发生装置,以保证良好的吸取稳定性;当所述第四气缸433驱使所述活动吸附治具435向所述固定吸附治具434靠拢时,此时所述固定吸附治具434与相邻的所述活动吸附治具435、相邻的两组所述活动吸附治具435之间的间距缩小至相同距离以实现定距聚拢;当所述第四气缸433驱使所述活动吸附治具435远离所述固定吸附治具434时,此时所述固定吸附治具434与相邻的所述活动吸附治具435、相邻的两组所述活动吸附治具435之间的间距增大至相同距离以实现定距分离,从而实现所述分距移载装置432定距聚拢或定距分离拾取锁套,进一步提高锁套定距装盒的一致性。
87.进一步地,于所述分距座的两端分别设置有用于限制所述活动吸附治具435 过度横移的第三缓冲器和第四缓冲器;所述第三缓冲器和第四缓冲器用于对活动吸附治具435起缓冲作用达到稳定的目的,避免所述活动吸附治具435过度横移而影响定距效果;
88.于所述第四气缸433的两端对应所述传动块设置有第七光电开关436和第八光电开关437,所述第七光电开关436和第八光电开关437均与所述固定吸附治具434和所述活动吸附治具435电性连接;所述第七光电开关436和第八光电开关437用于检测所述传动块的位置以判断所述分距移载装置432处于定距聚拢或定距分离状态,当所述第七光电开关436检测到所述传动块时,此时所述分距移载装置432处于定距聚拢,驱使所述固定吸附治具434和所述活动吸附治具435拾取锁套;当所述第八光电开关437检测到所述传动块时,此时所述分距移载装置432处于定距分离,驱使所述固定吸附治具434和所述活动吸附治具435松开锁套。
89.较佳地,所述锁芯翻转装置44包括第二翻转支架、纵向设置于所述第二翻转支架上的第五升降装置441、活动设置于所述第五升降装置441上的第二旋转装置442、及设置于所述第二旋转装置442上的第二翻转固持装置;具体地,所述第五升降装置441可优选为由气缸、电机驱动的装置,所述第二旋转装置442 可优选为旋转气缸等装置;
90.所述第二翻转固持装置包括第四拾取座、及若干组按间隔距离并列设置于所述第四拾取座上的第二拾取电磁铁443,所述第二拾取电磁铁443对应所述吸塑盒定位腔设置,所述第二拾取电磁铁443的下端面设置有用于固定锁芯的第二紧固弧面;具体地,所述第二拾取电磁铁443通电或断电以实现吸附或松开锁芯,所述第二紧固弧面与锁芯的外周面相适配,便于所述第二紧固弧面与锁芯进行更好地贴合,防止在移载过程中脱落,提高拾取可靠性。
91.较佳地,所述第二锁芯拾取装置45包括第二机械臂451、活动设置于所述第二机械臂451上的第五拾取座、及若干组按间隔距离并列设置于所述第五拾取座上的第五气缸452,于所述第五气缸452上对应所述吸塑盒定位腔设置有锁芯夹爪453,所述锁芯夹爪453设置有用于固定锁芯的第三紧固弧面;具体地,所述第二机械臂451具有3个水平回转自由
度,可提高所述锁芯夹爪453于有限空间内的大范围移动范围,所述第三紧固弧面与锁芯的外周面相适配,便于所述第三紧固弧面与锁芯进行更好地贴合,防止在移载过程中脱落,提高拾取可靠性。
92.较佳地,所述产品移载装置46包括第三机械臂461、活动设置于所述第三机械臂461上的第六拾取座、及若干组按间隔距离并列设置于所述第六拾取座上的第四吸取头462,所述第四吸取头462对应所述吸塑盒定位腔设置;具体地,所述第三机械臂461具有3个水平回转自由度,可提高所述第四吸取头462于有限空间内的大范围移动范围;所述第四吸取头462外接有负压发生装置,所述负压发生装置用于当所述第四吸取头462吸取以装载有锁套和锁芯的吸塑盒时产生负压。
93.较佳地,参见图10至图14,所述锁套排料打标检测设备1包括依次设置的锁套上料单元11、锁套排料单元12、第一移载定位单元13和第一打标检测单元14;
94.所述锁套上料单元11包括上下对应设置的储料仓111和振动盘112,于所述振动盘112的出料端设置有第一整理料道113;
95.所述锁套排料单元12包括第一上料工位和第一排料工位,依次经过所述第一上料工位和第一排料工位设置有第一横移装置121,于所述第一横移装置121 上活动设置有第一分料定距装置122,所述第一分料定距装置122往返于所述第一上料工位和第一排料工位,所述第一分料定距装置122按间隔距离并列设置有若干组第一锁套定距槽,所述第一锁套定距槽对应所述第一整理料道113设置;
96.所述第一打标检测单元14包括锁套入料工位、第一激光打标工位、第一视觉检测工位和第一良品取料工位,依次经过所述锁套入料工位、第一激光打标工位、第一视觉检测工位和第一良品取料工位设置有第一输送装置141;
97.所述第一移载定位单元13往返于所述第一排料工位和所述锁套入料工位。
98.具体地,依次设置所述锁套上料单元11、锁套排料单元12和第一打标检测单元14,并利用所述第一移载定位单元13定向连接所述锁套排料单元12和第一打标检测单元14,可全自动化地实现锁套上料、定距排料、激光打标和外观检测工序,提高锁套定点打标的高精度性和高效性,避免出现滞料、卡顿的问题而影响锁套打标效率;其中,配合设置所述储料仓111和振动盘112,确保每个锁套于所述第一整理料道113中有序地整理排列后逐一进料,保证锁套上料的连续性和有序性;并且开创性地设置所述第一分料定距装置122,实现锁套定距定量上料,避免因人工上料误差大而导致打标精度差的问题,装置自动化程度高。
99.较佳地,所述第一输送装置141包括若干组按间隔距离设置的锁套定位装置142,所述锁套定位装置142按间隔距离并列设置有若干组第二锁套定距槽,所述第二锁套定距槽对应所述第一移载定位单元13设置;以本实施例为例,所述第一输送装置141优选为可循环输送的输送带,在循环输送的过程中,所述第一输送装置141的上表面设置有四组所述锁套定位装置142,且该四组所述锁套定位装置142分别对应所述锁套入料工位、第一激光打标工位、第一视觉检测工位和第一良品取料工位设置;其次,所述锁套入料工位、第一激光打标工位、第一视觉检测工位和第一良品取料工位的空间范围相同,例如当所述第一输送装置141驱使所述锁套定位装置142前移一个第一工位距离时,即所述锁套定位装置142由所述锁套入料工位移至所述第一激光打标工位,所述第一工位距离为每个工位的空间宽度。
100.进一步地,相邻的所述第二锁套定距槽的间距等于相邻的所述第一锁套定距槽的间距,且每一组所述锁套定位装置142的所述第二锁套定距槽的设置数量与所述第一锁套定距槽的设置数量相同;规范化所述第二锁套定距槽、第一锁套定距槽的设置数量和间距,实现锁套定距定量上料,进一步提高锁套定点打标的一致性和高效性。
101.较佳地,于所述第一激光打标工位设置有第一激光打标头143,所述第一激光打标头143对应所述锁套定位装置142设置;所述第一激光打标头143对置于所述锁套定位装置142中的锁套进行打标,提高锁套定点打标的一致性和高效性。
102.较佳地,于所述第一视觉检测工位对应所述锁套定位装置142设置有第一 ccd检测装置144,所述锁套定位装置142的一侧对应所述第一ccd检测装置 144设置有第一检测光源145;具体地,所述第一检测光源145为所述第一ccd 检测装置144提供充足的光线,所述第一ccd检测装置144对已打标的锁套检测打标信息和外观结构,其中所述打标信息包括但不限于流水号、条形码等信息。
103.较佳地,所述第一移载定位单元13包括第二横移装置131、活动设置于所述第二横移装置131上的第一升降装置132、及固定设置于所述第一升降装置 132上的第一锁套拾取装置,所述第一锁套拾取装置往返于所述第一分料定距装置122和所述锁套定位装置142之间;具体地,所述第二横移装置131可优选为直线气缸、直线导轨等装置,所述第一升降装置132可优选为由气缸、电机驱动的装置;
104.所述第一锁套拾取装置包括第一拾取座、若干组按间隔距离并列设置于所述第一拾取座上的第一吸取头133,所述第一吸取头133对应所述第一锁套定距槽设置,所述第一吸取头133外接有负压发生装置;所述负压发生装置用于当所述第一吸取头133吸取锁套时产生负压。
105.进一步地,相邻的所述第一吸取头133的间距等于相邻的所述第一锁套定距槽的间距,且所述第一吸取头133的设置数量与所述第一锁套定距槽的设置数量相同;规范化所述第一吸取头133、第一锁套定距槽的设置数量和间距,实现锁套定距定量上料,进一步提高锁套定点打标的一致性和高效性。
106.较佳地,所述储料仓111的底部设置有漏斗出料口,对应所述漏斗出料口设置有直振料槽114,所述直振料槽114与第一振动器118连接,所述漏斗出料口与所述直振料槽114之间形成锁套上料腔;具体地,待打标的锁套由所述储料仓111投料,并沿所述漏斗出料口落至所述直振料槽114,所述第一振动器118 驱使所述直振料槽114振动,以使锁套由所述锁套上料腔落入所述振动盘112 中;锁套于所述振动盘112中振动找正方向,并于所述第一整理料道113上依次排列,在锁套振动排列前移的过程中,锁套由所述振动盘112平稳地平移至所述第一整理料道113上,提高排列整理有序性和可靠性;
107.对应所述振动盘112设置有第一光电开关115,所述第一光电开关115与所述第一振动器118电性连接;当所述第一光电开关115检测到所述振动盘112 中锁套过多时,驱使所述第一振动器118停止工作,反之锁套过少时启动工作,极大程度地提高设备的自动化程度。
108.进一步地,于所述第一整理料道113出料端的上下方分别设置有第一拦料装置116和第二光电开关,所述第一整理料道113与第二振动器119连接;所述第二振动器119驱使所述第一整理料道113振动,以使锁套沿所述第一整理料道113前移,所述第二振动器119用于
调整所述第一整理料道113中锁套的前移输送速度;
109.所述第一拦料装置116包括纵向设置的第一气缸、及固定设置于所述第一气缸上的第一拦料压头,所述第一拦料压头对应所述第一整理料道113设置,所述第二光电开关与所述第一气缸电性连接;当所述第二光电开关检测到锁套到达所述第一整理料道113的出料端时,驱使所述第一气缸下压所述第一拦料压头以拦截该锁套,提高设备的自动化程度。
110.进一步地,所述锁套排料单元12还包括第一拦料板123和第二拦料板124,所述第一拦料板123对应所述第一上料工位延伸设置于所述第一分料定距装置 122;
111.所述第二拦料板124设置于所述第一排料工位,当所述第一分料定距装置 122移至所述第一排料工位时,所述第一锁套定距槽与所述第二拦料板124之间形成锁套固定腔;
112.于所述第一上料工位对应所述第一锁套定距槽设置有第三光电开关,所述第三光电开关与所述第一横移装置121电性连接;具体地,所述第一横移装置 121可优选为直线气缸、直线导轨等装置;于所述第一横移装置121上分别对应所述第一上料工位和所述第一排料工位设置有第一到料检测组件和第二到料检测组件,所述第一分料定距装置122上分别对应所述第一到料检测组件和第二到料检测组件设置有第一检测件和第二检测件;所述第一到料检测组件和所述第二到料检测组件用于设定所述第一分料定距装置122的运动位置及运动范围,当所述第一到料检测组件检测到所述第一检测件时,此时所述第一分料定距装置122空载,锁套进入第一个所述第一锁套定距槽中,当所述第二光电开关检测到锁套已到达所述第一锁套定距槽中时,驱使所述第一横移装置121驱动所述第一分料定距装置122前移一个第一定距距离,直至所有所述第一锁套定距槽满载后,所述第一拦料板123拦截所述第一整理料道113的出料端以停止锁套上料,此时所述第一分料定距装置122与所述第二拦料板124接触以使锁套于所述锁套固定腔中进一步定距定向,极大程度地提高定距定向的精准度,其中所述第一定距距离为相邻的所述第一锁套定距槽的间距。
113.具体地,分别于所述锁套入料工位、所述第一良品取料工位对应所述锁套定位装置142设置有第三到料检测组件、第四到料检测组件,所述第三到料检测组件、所述第四到料检测组件分别用于检测位于所述锁套入料工位、所述第一良品取料工位的所述锁套定位装置142中是否内置有锁套,以达到与前后工序的衔接;当所述第三到料检测组件检测到位于所述锁套入料工位的所述锁套定位装置142中无锁套时,所述第一移载定位单元13将锁套放置于所述锁套定位装置142内,锁套在所述第一输送装置141的驱动作用下,依次经由所述第一激光打标头143激光打标、所述第一ccd检测装置144检测打标信息和外观结构;检测完成后若该锁套为良品,则移至所述第一良品取料工位以等待进入下一工序;检测完成后若该锁套为不良品,则移至所述第一良品取料工位排废,所述第一激光打标头143继续对下一组锁套进行打标,且打标信息内容与该不良品的打标信息内容相同,以保证良品的打标信息为顺号及连号。
114.较佳地,参见图15至图19,所述锁芯定距打标检测设备2包括依次设置的锁芯推料单元21、锁芯排料单元22、第二移载定位单元23和第二打标检测单元24;
115.所述锁芯排料单元22包括第二上料工位和第二排料工位,依次经过所述第二上料工位和第二排料工位设置有第三横移装置221,于所述第三横移装置221 上活动设置有第二分料定距装置222,所述第二分料定距装置222往返于所述第二上料工位和第二排料工位,所述第二分料定距装置222按间隔距离并列设置有若干组第一锁芯定距槽223,所述第
一锁芯定距槽223对应所述第二整理料道 212设置;
116.所述第二打标检测单元24包括锁芯入料工位、第二激光打标工位、第二视觉检测工位和第二良品取料工位,依次经过所述锁芯入料工位、第二激光打标工位、第二视觉检测工位和第二良品取料工位设置有第二输送装置241;
117.所述第二移载定位单元23包括第四横移装置231、活动设置于所述第四横移装置231上的第二升降装置232、及固定设置于所述第二升降装置232上的第一锁芯拾取装置,所述第一锁芯拾取装置往返于所述第二排料工位和所述锁芯入料工位之间;具体地,所述第四横移装置231可优选为直线气缸、直线导轨等装置,所述第二升降装置232可优选为由气缸、电机驱动的装置。
118.具体地,依次设置所述锁芯推料单元21、锁芯排料单元22和第二打标检测单元24,并利用所述第二移载定位单元23定向连接所述锁芯排料单元22和第二打标检测单元24,可全自动化地实现锁芯上料、定距排料、激光打标和外观检测的工序,提高锁芯定点打标的高精度性和高效性,避免出现滞料、卡顿的问题而影响锁芯打标效率;其中,开创性地设置所述第二分料定距装置222,实现锁芯定距定量上料,避免因人工上料误差大而导致打标精度差的问题,装置自动化程度高;并且利用所述第一锁芯拾取装置稳固可靠地拾取已定距的锁芯,确保正确定点投放至所述锁芯入料工位中,进一步优化后续定点打标的一致性和可靠性。
119.较佳地,所述第一锁芯拾取装置包括第二拾取座、若干组按间隔距离并列设置于所述第二拾取座上的第一拾取电磁铁233,所述第一拾取电磁铁233对应所述第一锁芯定距槽223设置,所述第一拾取电磁铁233的下端面设置有用于固定锁芯的第一紧固弧面234;具体地,所述第一拾取电磁铁233通电或断电以实现吸附或松开锁芯,所述第一紧固弧面234与锁芯的外周面相适配,便于所述第一紧固弧面234与锁芯进行更好地贴合,防止在移载过程中脱落,提高拾取可靠性。
120.进一步地,相邻的所述第一拾取电磁铁233的间距等于相邻的所述第一锁芯定距槽223的间距,且所述第一拾取电磁铁233的设置数量与所述第一锁芯定距槽223的设置数量相同;规范化所述第一拾取电磁铁233、第一锁芯定距槽 223的设置数量和间距,实现锁芯定距定量上料,进一步提高锁芯定点打标的一致性和高效性。
121.较佳地,所述第二输送装置241包括若干组按间隔距离设置的锁芯定位装置242,所述锁芯定位装置242按间隔距离并列设置有若干组第二锁芯定距槽,所述第二锁芯定距槽对应所述第一拾取电磁铁233设置有拾取避让腔;所述拾取避让腔用于在拾取锁芯时避让所述第一拾取电磁铁233,以提高锁芯的拾取精准度。
122.以本实施例为例,所述第二输送装置241优选为可循环输送的输送带,在循环输送的过程中,所述第二输送装置241的上表面设置有四组所述锁芯定位装置242,且该四组所述锁芯定位装置242分别对应所述锁芯入料工位、第二激光打标工位、第二视觉检测工位和第二良品取料工位设置;其次,所述锁芯入料工位、第二激光打标工位、第二视觉检测工位和第二良品取料工位的空间范围相同,例如当所述第一输送装置驱使所述锁套定位装置前移一个第二工位距离时,即所述锁芯定位装置242由所述锁芯入料工位移至所述第二激光打标工位,所述第二工位距离为每个工位的空间宽度。
123.进一步地,相邻的所述第二锁芯定距槽的间距等于相邻的所述第一锁芯定距槽
223的间距,且每一组所述锁芯定位装置242的所述第二锁芯定距槽的设置数量与所述第一锁芯定距槽223的设置数量相同;规范化所述第二锁芯定距槽、第一锁芯定距槽223的设置数量和间距,实现锁芯定距定量上料,进一步提高锁芯定点打标的一致性和高效性。
124.较佳地,于所述第二激光打标工位设置有第二激光打标头243,所述第二激光打标头243对应所述锁芯定位装置242设置;所述第二激光打标头243对置于所述锁芯定位装置242中的锁芯进行打标,提高锁芯定点打标的一致性和高效性。
125.较佳地,于所述第二视觉检测工位对应所述锁芯定位装置242设置有第二 ccd检测装置244,所述锁芯定位装置242的一侧对应所述第二ccd检测装置 244设置有第二检测光源245;具体地,所述第二检测光源245为所述第二ccd 检测装置244提供充足的光线,所述第二ccd检测装置244对已打标的锁芯检测打标信息和外观结构,其中所述打标信息包括但不限于流水号、条形码等信息。
126.较佳地,所述锁芯推料单元21包括锁芯推板装置211和第二整理料道212,所述第二整理料道212连通所述锁芯推板装置211的出料端与所述第二上料工位;
127.所述锁芯推板装置211的出料端与第三振动器213连接,所述第二整理料道212与第四振动器214连接;具体地,待打标的锁芯置于所述锁芯推板装置 211中,所述第三振动器213驱使所述锁芯推板装置211的出料端振动,以使锁芯进入所述第二整理料道212中,所述第四振动器214驱使所述第二整理料道 212振动,以使锁芯于所述第二整理料道212上依次排列,确保每个锁芯于所述第二整理料道212中有序地整理排列后逐一上料,保证锁芯整理上料的连贯性和有序性。
128.进一步地,于所述第二整理料道212出料端设置有第二拦料装置215,所述第二拦料装置215包括纵向设置的第二气缸、及固定设置于所述第二气缸上的第二拦料压头,所述第二拦料压头对应所述第二整理料道212设置;
129.所述第二分料定距装置222还包括对应所述第一锁芯定距槽223设置的第四光电开关224,所述第四光电开关224与所述第二气缸电性连接;当所述第四光电开关224检测到锁芯到达所述第一锁芯定距槽223中时,驱使所述第二气缸下压所述第二拦料压头以拦截置于所述第二整理料道212中的锁芯,提高设备的自动化程度。
130.进一步地,于所述第三横移装置221上分别对应所述第二上料工位和所述第二排料工位设置有第五到料检测组件和第六到料检测组件,所述第二分料定距装置222上分别对应所述第五到料检测组件和第六到料检测组件设置有第三检测件和第四检测件;所述第五到料检测组件和所述第六到料检测组件用于设定所述第二分料定距装置222的运动位置及运动范围,当所述第五到料检测组件检测到所述第三检测件时,此时所述第二分料定距装置222空载,锁芯进入第一个所述第一锁芯定距槽223中,当所述第四光电开关224检测到锁芯已到达所述第一锁芯定距槽223中时,驱使所述第三横移装置221驱动所述第二分料定距装置222前移一个第二定距距离,直至所有所述第一锁芯定距槽223满载后,所述第二拦料装置215拦截所述第二整理料道212的出料端以停止锁芯上料,极大程度地提高定距定向的精准度,其中所述第二定距距离为相邻的所述第一锁芯定距槽223的间距。
131.具体地,分别于所述锁芯入料工位和所述第二良品取料工位对应所述锁芯定位装置242设置有第七到料检测组件、第八到料检测组件,所述第七到料检测组件、所述第八到料检测组件分别用于检测位于所述锁芯入料工位、所述第二良品取料工位的所述锁芯定位
装置242中是否内置有锁芯,以达到与前后工序的衔接;当所述第七到料检测组件检测到位于所述锁芯入料工位的所述锁芯定位装置242中无锁芯时,所述第二移载定位单元23将锁芯放置于所述锁芯定位装置242内,锁芯在所述第二输送装置241的驱动作用下,依次经由所述第二激光打标激光打标、所述第二ccd检测装置244检测打标信息和外观结构;检测完成后若该锁芯为良品,则移至所述第二良品取料工位以等待进入下一工序;检测完成后若该锁芯为不良品,则移至所述第二良品取料工位排废,所述第二激光打标头243继续对下一组锁芯进行打标,且打标信息内容与该不良品的打标信息内容相同,以保证良品的打标信息为顺号及连号。
132.较佳地,参见图20至图24,所述吸塑盒上料设备3包括并列设置的第一堆叠工位和第二堆叠工位,连接所述第一堆叠工位和所述第二堆叠工位设置有第三输送装置31,于所述第三输送装置31上活动设置有料仓装置32;
133.于所述第一堆叠工位和所述第二堆叠工位之间设置有第三上料工位,于所述第三上料工位对应所述料仓装置32设置有吸取移载装置33和吸塑盒顶升装置34;
134.所述料仓装置32包括并列设置的第一料仓321和第二料仓322,所述第一料仓321往返于所述第一堆叠工位和所述第三上料工位,所述第二料仓322往返于所述第三上料工位和所述第二堆叠工位;
135.所述吸塑盒顶升装置34包括若干组按间隔距离水平设置的升降板341;
136.所述第一料仓321包括承载底板3211、若干组纵向设置于所述承载底板 3211上的第一导向杆3212,相邻的所述第一导向杆3212之间形成吸塑盒导向腔,于所述吸塑盒导向腔中设置有若干组吸塑盒定位座3213,于相邻的所述吸塑盒定位座3213之间贯穿所述承载底板3211设置有升降避让槽3214,所述升降板341活动穿置于所述升降避让槽3214中。
137.具体地,配合采用所述第三输送装置31和所述料仓装置32,实现及时切换空载的料仓,保证吸塑盒持续上料不停工,并且配合设置所述吸塑盒顶升装置 34,在移取顶层吸塑盒后及时顶升堆叠的吸塑盒,以优化吸塑盒的上料连贯性,提高了吸塑盒有序上料的效率;其中,堆叠的吸塑盒放置于所述吸塑盒定位座 3213上,并沿所述吸塑盒导向腔定向供料,提高吸塑盒上料的有序性和高效性。
138.较佳地,贯穿所述吸塑盒定位座3213设置有第一检测通孔,于所述承载底板3211上对应所述第一检测通孔设置有第五光电开关3215,所述第五光电开关 3215与所述第三输送装置31电性连接;当所述第一料仓321中的所述第五光电开关3215检测到所述吸塑盒导向腔中不含吸塑盒时,启动所述第三输送装置31 将所述第二料仓322切换至所述第三上料工位,极大程度地提高设备的自动化程度。
139.进一步地,所述第一料仓321还包括固定板,所述固定板与所述承载底板 3211通过若干组限位挡条3216进行定位固定,贯穿所述固定板连通所述吸塑盒导向腔设置有吸塑盒拾取槽;通过设置开设有所述吸塑盒拾取槽的所述固定板,增强所述第一料仓321的结构强度的同时,进一步提高吸塑盒的上料定向性。
140.进一步地,于所述固定板上对应所述吸塑盒拾取槽设置有第九到料检测组件3217;所述第九到料检测组件3217用于检测所述吸塑盒定位座3213是否已到达所述吸塑盒导向腔的最高位置,当所述第九到料检测组件3217检测到所述吸塑盒已到达最高位置后,所述吸塑盒顶升装置34停止工作。
141.进一步地,于所述固定板上对应所述吸塑盒拾取槽延伸设置有若干组拨片 3218,所述拨片3218用于在所述吸取移载装置33拾取吸塑盒时辅助分离吸塑盒,提高吸塑盒的上料效率。
142.具体地,所述第二料仓322的结构与所述第一料仓321的结构相同。
143.较佳地,所述吸塑盒顶升装置34包括升降安装座、及均纵向设置于所述升降安装座中的丝杆和第二导向柱,所述丝杆与第一电机342的驱动轴固定连接,于所述第二导向柱上活动设置有升降传动座,所述升降传动座与所述丝杆传动连接,所述升降板341按间隔距离水平设置于所述升降传动座上;通过利用所述第一电机342精准控制所述丝杆的转动圈数,进而精确控制所述升降传动座上升一个上料高度,每当所述吸取移载装置33拾取一层吸塑盒后,所述第一电机342驱动所述升降传动座上升,从而驱使升降板341推动堆叠的吸塑盒上升一个上料高度,以实现吸塑盒堆叠上料,其中所述上料高度为相邻吸塑盒之间的堆叠间距。
144.进一步地,所述第三输送装置31包括水平设置的两组导轨、活动设置于所述导轨上的输送座、及与所述输送座固定连接的第三气缸,所述第一料仓321 和所述第二料仓322并列设置于所述输送座上;所述第三气缸控制所述第一料仓321和所述第二料仓322同步横移以实现切换料仓,当所述第一料仓321空载后,移动满载的所述第二料仓322至所述第三上料工位,如此交替,实现堆叠上料不停工,提高产品上料效率;
145.于所述第一堆叠工位、所述第三上料工位分别设置有第一缓冲器、第二缓冲器,所述输送座对应所述第一缓冲器和第二缓冲器设置有缓冲挡块;当所述第三输送装置31驱使所述料仓装置32横移至所述缓冲挡块抵接所述第一缓冲器时,此时所述第二料仓322位于所述第三上料工位中进行上料操作;当所述第三输送装置31驱使所述料仓装置32横移至所述缓冲挡块抵接所述第二缓冲器时,此时所述第一料仓321位于所述第三上料工位中进行上料操作,避免所述料仓装置32过度横移而影响上料效果。
146.进一步地,所述吸取移载装置33包括第五横移装置331、活动设置于所述第五横移装置331上的第三升降装置332、及固定设置于所述第三升降装置332 上的吸塑盒拾取装置;具体地,所述第五横移装置331可优选为直线气缸、直线导轨等装置,所述第三升降装置332可优选为由气缸、电机驱动的装置;
147.所述吸塑盒拾取装置包括第三拾取座、若干组按间隔距离并列设置于所述第三拾取座上的第二吸取头333,所述第二吸取头333对应所述吸塑盒拾取槽设置,所述第二吸取头333外接有负压发生装置;所述负压发生装置用于当所述第二吸取头333吸取吸塑盒时产生负压。
148.进一步地,所述第三输送装置31的驱动方向垂直于所述吸塑盒顶升装置34 的驱动方向,所述吸取移载装置33的驱动方向垂直于所述吸塑盒顶升装置34 的驱动方向,所述吸取移载装置33的驱动方向垂直于所述第三输送装置31的驱动方向。
149.本发明在工作时,包括以下步骤:
150.(1)将待打标的锁套投入至所述锁套上料单元11中振动找正排列,以等待上料;
151.已找正的锁套进入所述锁套排料单元12中进行定距排料;
152.所述第一移载定位单元13于所述锁套排料单元12中拾取已定距的锁套,并移至所述第一打标检测单元14中;
153.所述第一打标检测单元14对锁套依次进行激光打标、视觉检测,检测合格的锁套等待取料;
154.(2)将待打标的锁芯投入至所述锁芯推料单元21中振动排列,以等待上料;
155.锁芯依次进入所述锁芯排料单元22中进行定距排料;
156.所述第二移载定位单元23于所述锁芯排料单元22中拾取已定距的锁芯,并移至所述第二打标检测单元24中;
157.所述第二打标检测单元24对锁芯依次进行激光打标、视觉检测,检测合格的锁芯等待取料;
158.(3)所述第三输送装置31将堆叠有吸塑盒的所述第一料仓321移至所述第三上料工位;
159.所述吸塑盒顶升装置34顶升堆叠的吸塑盒上升一个上料高度,所述吸取移载装置33拾取所述第一料仓321中顶层的吸塑盒后移至吸塑盒入料工位,重复吸取上料直至所述第一料仓321空载;
160.所述第三输送装置31将堆叠有吸塑盒的所述第二料仓322移至所述第三上料工位,重复进行上述步骤以完成交替上料操作;
161.(4)所述吸取移载装置33将吸塑盒放置于位于所述吸塑盒入料工位的组装承载座412中,以完成吸塑盒入料工序;
162.所述承载转盘装置41驱动旋转90
°
,以使该组装承载座412移至所述锁套装盒工位;
163.检测合格的锁套由所述锁套翻转装置42拾取后翻转180
°
,并经由所述第二锁套拾取装置43移载放置于吸塑盒中,以完成锁套装盒工序;
164.所述承载转盘装置41驱动旋转90
°
,以使该组装承载座412移至所述锁芯装盒工位;
165.检测合格的锁芯由所述锁芯翻转装置44拾取后翻转180
°
,并经由所述第二锁芯拾取装置45移载放置于吸塑盒中,以完成锁芯装盒工序;
166.所述承载转盘装置41驱动旋转90
°
,以使该组装承载座412移至所述产品出料工位;
167.装载有锁套和锁芯的吸塑盒经由所述产品移载装置46移至纸塑压合设备5 中,以完成产品出料工序;
168.(5)所述纸塑压合设备5对装载有锁套和锁芯的吸塑盒进行压合吸塑盒,以完成装盒包装操作。
169.本发明的封条装盒包装系统具有以下优点:基于具体划分所述装盒组装设备为吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位,并对应各工位相应设置所述吸塑盒上料设备、锁套排料打标检测设备、锁芯定距打标检测设备和纸塑压合设备,实现有机连接个设备以完成吸塑盒分离入料、打标锁套定距装盒、打标锁芯定距装盒和封条产品压合出料的工序,工序流程连贯性和自动化程度高;所述装盒组装设备利用所述承载转盘装置依次流转于所述吸塑盒入料工位、锁套装盒工位、锁芯装盒工位和产品出料工位,自动化完成吸塑盒入料、锁套装盒、锁芯装盒和产品出料的工序,组装工序连贯性强,设备占用空间小,提高装盒组装的高效性和有序性;所述锁套排料打标检测设备可全自动化地实现
锁套上料、定距排料、激光打标和外观检测工序,提高锁套定点打标的高精度性和高效性,避免出现滞料、卡顿的问题而影响锁套打标效率;所述锁芯定距打标检测设备可全自动化地实现锁芯上料、定距排料、激光打标和外观检测的工序,提高锁芯定点打标的高精度性和高效性,避免出现滞料、卡顿的问题而影响锁芯打标效率;所述吸塑盒上料设备配合采用所述第三输送装置和所述料仓装置,实现及时切换空载的料仓,保证吸塑盒持续上料不停工,并且配合设置所述吸塑盒顶升装置,在移取顶层吸塑盒后及时顶升堆叠的吸塑盒,以优化吸塑盒的上料连贯性,提高了吸塑盒有序上料的效率。
170.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的技术手段和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。故凡是未脱离本发明技术方案的内容,依据本发明之形状、构造及原理所作的等效变化,均应涵盖于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。