1.本发明属于玻璃生产检测技术领域,具体涉及一种玻璃检测运载平台。
背景技术:
2.玻璃在电子显示屏中的应用越来越广泛,如作为电视、笔记本电脑、pad、手机等的保护玻璃(即玻璃盖板)。目前,对于面积玻璃的表面检测,在生产线上多采用人眼检测的方法,并且辅以显微镜以及放大镜等工具,但是人眼检测方法自身存在缺点和局限性:因为人眼在强光下检测缺陷既效率低下,又受主观因素影响,不同视力的人检测的结果会有较大差异,缺乏统一的评判标准;并且受工作环境的影响,检测员很容易由疲劳导致错判或漏检现象的发生。而对于生产企业来说,产品质量是其要考虑的重要环节。玻璃盖板的表面缺陷直接影响着产品的质量,只有在保证质量过关,生产企业才能够占领更大的市场份额。故而,如何改善检测玻璃盖板表面缺陷的方法已经成为制约企业发展和提高企业效益的瓶颈。
3.对于生产出玻璃盖板进行再加工的企业来说,检测系统能避免次品进入后序工序中,降低成本,提高质量,并且根据检测到的缺陷特征能够分析缺陷是由哪一步引入的,进一步改进生产工艺,减少生产过程中的缺陷,提高产品性能和成品率。因此,高速、稳定、非接触检测玻璃盖板表面缺陷的系统以及方法对于市场来说是不可或缺的。
4.例如手机屏膜、激光器谐振腔、相机镜头、电子产品显示屏、眼镜镜片、卫星光学镜片。随着科技的发展,对玻璃的需求和要求也会进一步提高。但是,在玻璃生产过程中,由于生产工艺与其他方面的原因会在玻璃表面产生划痕、凸点等影响玻璃表面平整度的缺陷,影响玻璃的质量。所以如何快速有效地检测玻璃表面缺陷成为了亟待解决的问题。
技术实现要素:
5.为了解决现有技术中存在的问题,本发明提供了一种玻璃检测运载平台,解决了现有技术中输送玻璃的过程里稳定性差,容易造成玻璃划伤等技术问题。
6.本发明解决技术问题所采用的技术方案如下:
7.玻璃检测运载平台,该平台包括:包括基座、气浮平台、夹持移动装置、初定位装置、图像摄取装置、供气系统、真空吸附系统和控制系统;所述气浮平台、夹持移动装置、初定位装置、图像摄取装置、供气系统、真空吸附系统和控制系统设置在基座上;待检测玻璃放置在所述气浮平台上,通过所述夹持移动装置固定和运送;所述初定位装置防止待检测玻璃漂移;所述图像摄取装置采集待检测玻璃的检测运载图像;所述供气系统;所述供气系统为所述夹持移动装置供气;所述真空吸附系统为所述夹持移动装置提供抽真空状态;所述控制系统控制气浮平台、夹持移动装置、初定位装置、图像摄取装置、供气系统、真空吸附系统的驱动和控制。
8.优选的,所述气浮平台包括水平直线延伸的气浮板,若干所述气浮板间隔设置且固定在所述基座上,若干所述气浮板构成隔栅状的气浮平台;
9.所述夹持移动装置包括气浮导轨、横向气缸、横向活架、纵向气缸、纵向活架;所述基座安装两所述气浮导轨,两所述气浮导轨分别位于所述气浮平台的两侧,两所述气浮导轨左右平行设置,所述气浮导轨具有水平直线活移的气浮滑台;所述横向气缸具有水平横向伸缩的缸杆,所述横向气缸的缸杆的轴线与所述气浮导轨垂直,所述横向气缸安装在所述气浮导轨的气浮滑台上;所述横向活架安装在所述横向气缸的缸杆上,所述横向活架上安装用于触压玻璃侧边沿的横向触压单元;所述纵向气缸具有水平纵向伸缩的缸杆,所述纵向气缸的缸杆的轴线与所述气浮导轨平行,所述纵向气缸安装在所述横向活架上;所述纵向活架安装在所述纵向气缸的缸杆上,所述纵向活架上安装用于触压玻璃端边沿的纵向触压单元;所述横向气缸、横向活架、纵向气缸、纵向活架、横向触压单元和纵向触压单元组成对玻璃角部夹持的角夹持组件,两所述气浮导轨上安装矩阵分布的四组所述角夹持组件,所述角夹持组件设于所述气浮平台的上方;
10.所述初定位装置包括升降气缸、直线模组、定位架、定位弹簧、接近开关;所述升降气缸固定在所述基座上,所述升降气缸位于所述气浮平台的气浮板之间的隔缝中,所述升降气缸具有竖直方向伸缩的缸杆;所述直线模组具有水平直线活移的滑块,所述直线模组安装在所述升降气缸的缸杆上;所述定位架包括竖向延伸的竖向架以及横向水平延伸的横向杆,所述横向杆与所述竖向架形成l形构造,所述横向杆的轴线与所述直线模组的滑块的活移方向平行,所述横向杆安装在所述直线模组的滑块上,所述横向杆沿自身轴线活移;所述定位弹簧安装在所述定位架上,所述定位弹簧对所述定位架施加与滑块活移方向平行的弹力;所述接近开关安装在所述直线模组的滑块上,所述接近开关由所述定位架的水平横向位置控制开闭;
11.所述图像摄取装置包括龙门架和图像摄取元件,所述龙门架安装在所述基座上,所述龙门架的横梁上均布安装若干图像摄取元件,所述龙门架的下方为检测工位。
12.优选的,所述气浮平台由两搬运平面段和位于两搬运平面段之间的检测平面段组成。
13.优选的,所述横向触压单元和纵向触压单元包括触压顶板和触压弹簧,所述触压顶板具有与玻璃的边沿接触的触压端面,所述横向活架和纵向活架通过轴线竖直的销轴铰接安装所述触压顶板;在所述触压顶板与所述横向活架之间以及触压顶板与所述纵向活架之间设置左右对称的两触压弹簧。
14.优选的,所述竖向架的上端安装定位压块,所述横向杆为圆柱导杆,所述滑块具有与所述圆柱导杆结合的导向圆孔,所述横向杆插装在所述滑块的导向圆孔中。
15.优选的,所述横向杆远离所述竖向架的端部设有端头部,所述定位弹簧套装在所述横向杆上,所述定位弹簧的两端部分别顶压所述滑块和所述端头部。
16.优选的,所述横向杆上固定有位置标板,所述位置标板向所述定位架活移并触发所述接近开关关闭。
17.优选的,所述供气系统包括:空气压缩机、储气罐、c级过滤器、干燥机、t级过滤器、a级过滤器和比例阀;所述空气压缩机、储气罐、c级过滤器、干燥机、t级过滤器、a级过滤器和比例阀依次连接,为所述夹持移动装置提供均匀恒定的压力。
18.优选的,所述真空吸附系统包括:真空减压阀、过滤系统和真空泵系统;所述真空减压阀、过滤系统和真空泵系统依次连接,为所述夹持移动装置提供真空状态。
19.优选的,所述控制系统包括驱动器和控制器。
20.本发明的有益效果是:
21.本发明采用龙门式双驱结构布局,采用大理石气浮导轨,精度高,性能稳定;采用非接触式气浮轴承、非接触式无铁芯直线电机驱动和非接触式反馈装置,不会出现磨损或性能下降,寿命无限。
22.本发明系统配置高性能驱动器和控制器,具有优异的伺服性能,具有误差补偿功能,可有效提高定位精度。与普通伺服控制系统相比,性能极大提升。
23.本发明可以对玻璃进行无摩擦和无振动的平滑移动,配合初定位装置和夹持移动装置作用,实现高精度移动定位,定位精度和重复精度得到了显著提高。pitch/roll/yaw指标得到了很大的提高。
24.本发明对玻璃采用气浮支撑,保证玻璃在搬运过程中受力均匀一致,且避免损坏。
附图说明
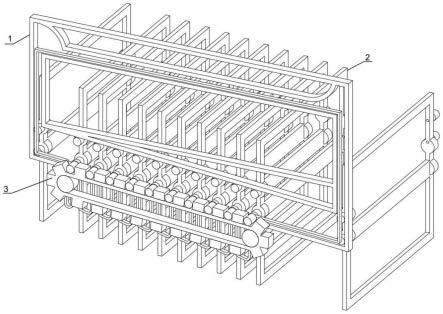
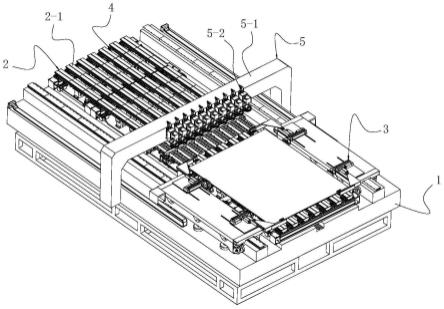
25.图1为发明的结构示意图;
26.图2为发明中夹持移动装置的结构示意图;
27.图3为发明中横向触压单元的结构示意图;
28.图4为发明中初定位装置的结构示意图;
29.图5为本发明中供气系统的结构示意图;
30.图6为本发明中真空吸附系统的结构示意图。
31.图中:1、基座;2、气浮平台;2-1、气浮板;3、夹持移动装置;3-1、气浮导轨;3-1-1、基础导轨;3-1-2、直线导轨电机;3-1-3、气浮滑台;3-1-4、横向气垫板;3-1-5、纵向气垫板;3-2、横向气缸;3-3、横向活架;3-4、纵向气缸;3-5、纵向活架;3-6、横向触压单元;3-6-1、触压顶板;3-6-2、触压弹簧;3-7、纵向触压单元;4、初定位装置;4-1、升降气缸;4-2、直线模组;4-2-1、直线导轨;4-2-2、伺服电机;4-2-3、丝杠;4-2-4、滑块;4-3、定位架;4-3-1、竖向架;4-3-2、横向杆;4-3-3、定位压块;4-4、定位弹簧;4-5、接近开关;4-6、位置标板;5、图像摄取装置;5-1、龙门架;5-2、图像摄取元件。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。请参阅图1-4,本发明提供以下技术方案:一种玻璃检测装置,包括基座1、气浮平台2、夹持移动装置3、初定位装置4、图像摄取装置5、供气系统、真空吸附系统和控制系统。所述气浮平台2、夹持移动装置3、初定位装置4、图像摄取装置5、供气系统、真空吸附系统和控制系统设置在基座1上;待检测玻璃放置在所述气浮平台2上,通过所述夹持移动装置3固定和运送;所述初定位装置4防止待检测玻璃漂移;所述图像摄取装置5采集待检测玻璃的检测运载图像;所述供气系统为所述夹持移动装置3供气;所述真空吸附系统为所述夹持移动装置3提供抽真空状态;所述控制系统控制气浮平台2、夹持移动装置3、初定位装置4、图像摄取装置5、供气系统、真空吸附系统的驱动和控制。
33.气浮平台2包括水平直线延伸的气浮板2-1,若干气浮板间隔设置且固定在所述基座1上,若干所述气浮板2-1构成隔栅状的气浮平台。本实施例中,基座1为大理石台板,气浮板2-1可的横向位置可进行调节,通过调节气浮板2-1的横向位置,可以改变气浮平台2的宽度,从而使之适用不同尺寸的玻璃检测。气浮板2-1为现有已知部件。本实施例中,气浮平台2由两搬运平面段和位于两搬运平面段之间的检测平面段组成。搬运平面段的气浮板2-1选用普通气浮板,而检测平面段选用精密气浮导轨。可保证检测区域0.02mm平面度的要求。
34.夹持移动装置3包括气浮导轨3-1、横向气缸3-2、横向活架3-3、纵向气缸3-4、纵向活架3-5。
35.基座1安装两所气浮导轨3-1,两气浮导轨分别位于气浮平台2的两侧,两气浮导轨3-1左右平行设置。
36.气浮导轨3-1包括基础导轨3-1-1、直线导轨电机3-1-2、气浮滑台3-1-3、横向气垫板3-1-4、纵向气垫板3-1-5。基础导轨3-1-1是横断面为矩形的直线导轨。气浮滑台3-1-3设置在基础导轨3-1-1的上方,横向气垫板3-1-4安装在气浮滑台3-1-3的下部,横向气垫板3-1-4支撑在基座1上,横向气垫板3-1-4向下的气孔喷出气体并在横向气垫板1-4与基础导轨1-1的上端面之间形成气膜。纵向气垫板3-1-5安装在气浮滑台3-1-3的下部,纵向气垫板3-1-5位于基础导轨3-1-1的左右两侧,纵向气垫板3-1-5喷出气体并在纵向气垫板3-1-5与基础导轨3-1-1的侧端面之间形成气膜。直线导轨电机3-1-2为常规已知构件,其安装在基础导轨3-1-1与气浮滑台3-1-3之间,直线导轨电机3-1-2具有沿基础导轨3-1-1直线活移的电机活块,此电机活块与气浮滑台3-1-3连接,直线导轨电机3-1-2工作驱动气浮滑台3-1-3直线活移。本实施例中,直线导轨电机3-1-2为无铁芯直驱直线电机。
37.横向气缸3-2具有水平横向伸缩的缸杆,横向气缸3-2的缸杆的轴线与气浮导轨垂直,横向气缸3-2安装在气浮导轨3-1的气浮滑台3-1-3上。横向活架3-3安装在横向气缸3-2的缸杆上,横向活架3-3上安装用于触压玻璃侧边沿的横向触压单元3-6。即横向气缸3-2的缸体固定在气浮滑台3-1-3上,两气浮滑台3-1-3上的横向气缸3-2的缸杆可相对伸出,横向触压单元3-6对玻璃两侧边沿实现夹持。
38.纵向气缸3-4具有水平纵向伸缩的缸杆,纵向气缸3-4的缸杆的轴线与气浮导轨3-1平行,纵向气缸3-4安装在横向活架3-3上。纵向活架3-5安装在纵向气缸3-4的缸杆上,纵向活架3-5上安装用于触压玻璃端边沿的纵向触压单元3-7。
39.纵向触压单元3-7和横向触压单元3-6的结构相同。具体的,横向触压单元3-6和纵向触压单元3-7包括触压顶板3-6-1和触压弹簧3-6-2,触压顶板3-6-1具有与玻璃的边沿接触的触压端面。横向活架3-3和纵向活架3-5通过轴线竖直的销轴铰接安装触压顶板3-6-1,即在横向活架3-3和纵向活架3-5的前端部安装耳板,耳板加工出轴线竖直的销孔,在触压顶板3-6-1的后部同样固定耳板,两耳板通过销轴铰接。在触压顶板3-6-1与横向活架3-3之间以及触压顶板3-6-1与纵向活架3-5之间设置左右对称的两触压弹簧3-6-2。以横向触压单元3-6为例,触压弹簧3-6-2的一端与触压顶板3-6-1的背部连接,触压弹簧3-6-2的另一端与横向活架3-3连接。上述构造令纵向触压单元3-7和横向触压单元3-6的触压端面为可角度变化且具有弹性的接触面,保证触压端面与玻璃边沿的最大接触面积。本实施例中,触压顶板的触压端面为peek材质,具有抗静电特性。
40.横向气缸3-2、横向活架3-3、纵向气缸3-4、纵向活架3-5以及横向触压单元3-6或
者纵向触压单元3-7组成对玻璃角部夹持的角夹持组件,气浮导轨3-1上安装两组角夹持组件。四组角夹持组件在气浮平台2上呈矩阵式分布。
41.本实施例所述装置,四组角夹持组件可对位于气浮平台2上的玻璃夹持,气浮导轨工作将夹持的玻璃移动至检测工位。
42.初定位装置4包括升降气缸4-1、直线模组4-2、定位架4-3、定位弹簧4-4、接近开关4-5。
43.升降气缸4-1固定在基座1上,升降气缸4-1位于气浮平台2的气浮板2-1之间的隔缝中,升降气缸4-1具有竖直方向伸缩的缸杆。
44.直线模组4-2安装在升降气缸4-1的缸杆上。直线模组4-2为常规已知部件,现有技术中存在可满足工作要求的多种型号的直线模组。本实施例中,直线模组4-2包括直线导轨4-2-1、伺服电机4-2-2、丝杠4-2-3和滑块4-2-4。直线导轨4-2-1水平设置,直线导轨4-2-1固定在升降气缸4-1的缸杆上端。滑块4-2-4配装在直线导轨4-2-1上,滑块4-2-4在直线导轨4-2-1的导向作用下水平直线活移。丝杠4-2-3的两端安装在直线导轨4-2-1的两端部,丝杠4-2-3可绕自身轴线转动,丝杠4-2-3的轴线与滑块4-2-4的活移方向平行,伺服电机4-2-2固定在直线导轨4-2-1的端部,伺服电机4-2-2驱动丝杠4-2-3转动。滑块4-2-4与丝杠4-2-3通过螺纹结合,转动的丝杠4-2-3驱动滑块4-2-4水平直线活移。
45.定位架4-3包括竖向延伸的竖向架4-3-1以及横向水平延伸的横向杆4-3-2,横向杆4-3-2与竖向架4-3-1形成l形构造,横向杆4-3-2的轴线与直线模组4-2的滑块4-2-4的活移方向平行,横向杆4-3-2安装在直线模组4-2的滑块4-2-4上,横向杆4-3-2沿自身轴线活移。定位弹簧4-4安装在定位架4-3上,定位弹簧4-4对定位架4-3施加与滑块4-2-4活移方向平行的弹力。具体的,竖向架4-3-1的上端安装定位压块4-3-3,定位压4-3-3块是固定在竖向架4-3-1内侧的橡胶块,其会与玻璃侧沿接触。横向杆4-3-2为圆柱导杆,竖向架4-3-1的下端与横向杆4-3-2的端部固定。滑块4-2-4具有与圆柱导杆结合的导向圆孔,横向杆4-3-2插装在滑块4-2-4的导向圆孔中。横向杆4-3-2远离竖向架4-3-1的端部设有端头部,定位弹簧4-4套装在横向杆4-3-2上,定位弹簧4-4的两端部分别顶压滑块4-2-4和端头部。滑块4-2-4向对应端头部的方向活移,对玻璃的定位,定位压块4-3-3与玻璃边沿接触后,滑块4-2-4继续活移,定位弹簧4-4被压缩,避免玻璃边沿受到定位压块4-3-3过大压力而损坏。
46.接近开关4-5安装在直线模组4-2的滑块4-2-4上,接近开关4-5由定位架3的水平横向位置控制开闭。定位弹簧4-4被压缩,定位架4-3与滑块4-2-4之间的相对位置产生预设的横向水平相对位移之后,定位架4-3的结构部分被接近开关4-5感应到,接近开关4-5控制直线模组4-2的私服电机4-2-2关闭,滑块4-2-4停止活移,最终实现对玻璃的定位。定位后,本装置反向移动并最终下沉至隔栅台的台面之下。本实施例中,定位架4-3被接近开关4-5感应的结构部分为金属材质的位置标板4-6,位置标板4-6向定位架4-3活移并触发接近开关4-5控制直线模组4-2的伺服电机4-2-2关闭,之后反向旋转。接近开关4-5为常规已知部件。
47.图像摄取装置5包括龙门架5-1和图像摄取元件5-2,龙门架5-1安装在基座1上,龙门架5-1的横梁上均布安装若干图像摄取元件5-2,图像摄取元件5-2可选用高清相机,龙门架的下方为检测工位,即为检测平面段。
48.玻璃放置在气浮平台2上,首先由初定位装置4进行粗定位,之后由夹持移动装置3
进行精确定位并夹持,由夹持移动装置3移动只检测工位检测。
49.如图5和图6所示,气路分为供气系统和真空吸附系统。搬运平面段和检测平面段域均涉及到供气和真空吸附。所述供气系统包括:空气压缩机、储气罐、c级过滤器、t级过滤器、a级过滤器和比例阀;所述空气压缩机、储气罐、c级过滤器、t级过滤器、a级过滤器和比例阀依次连接,为所述夹持移动装置提供均匀恒定的压力。如果被检测对象需要绝对无水,可在t级过滤器前加吸附式冷干机和干燥机。供气系统采用两路进气,其中搬运平面段一路,精密检测平面段一路。为了使各平面段各气浮导轨3-1供气压力一致,采用对称式供气模式,并在供气管道两侧加装比例阀,使气压保持在恒定压力,在供气近出气端装压力监测器。气体通过空压机压缩进入储气罐后,通过c级过滤器进行初步过滤,然后依次通过冷干机和吸附式干燥机进行干燥后,通过t级和a级过滤器进行进步过滤,最后通过比例阀供气到气浮导轨3-1,使玻璃浮起。
50.真空吸附系统与供气系统模式相同,同样设置搬运平面段一路,精密检测平面段一路。所述真空吸附系统包括:真空减压阀、c级过滤器、t级过滤器、a级过滤器和真空泵系统;所述真空减压阀、c级过滤器、t级过滤器、a级过滤器和真空泵系统依次连接,为所述夹持移动装置提供真空状态。同样为了使各平面段各气浮导轨3-1吸附力一致,也采用对称式模式,并在管道两侧加真空调节阀,控制吸附力恒定,在近吸气端装压力监测器。气体通过真空减压阀吸气到c级过滤器进行初步过滤后,通过t级和a级过滤器进行进步过滤,最后通过真空泵吸入储气罐,使玻璃吸附。
51.控制系统包括驱动器和控制器,实现气浮平台、夹持移动装置、初定位装置、图像摄取装置、供气系统、真空吸附系统的驱动和控制。
52.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。