技术特征:
1.一种起重机,包括:承载器单元,其具有底盘、连接到所述底盘的轮胎、承载器甲板以及外伸支腿,所述外伸支腿能够移动成展开状态和缩回状态:在所述展开状态下,所述外伸支腿接合位于下方的支承表面,并且将所述轮胎从所述支承表面提升,使得所述外伸支腿支承所述承载器单元;在所述缩回状态下,所述外伸支腿从所述支承表面脱离,并且所述轮胎与所述支承表面接合,使得所述轮胎支承所述承载器单元;上部结构,其安装于所述承载器单元上,所述上部结构包括伸缩吊臂;坡度传感器,其可操作地连接到所述承载器单元,并且配置成检测所述承载器单元在提升操作期间的俯仰和/或滚动;以及用于监测由所述伸缩吊臂提升的负载的系统,所述系统配置成:确定由所述伸缩吊臂提升的当前负载;从所述坡度传感器接收所述承载器单元的俯仰和/或滚动信息;基于所述俯仰和/或滚动信息来调整所述起重机在坐标系中的坐标;使用经调整的坐标来确定经变换的操作半径;以及将所述被提升的负载与在所述经变换的操作半径下的额定能力进行比较。2.根据权利要求1所述的起重机,其特征在于,所述系统配置成基于所述被提升的负载与在所述经变换的操作半径下的额定能力的比较来控制所述伸缩吊臂的一次或多次移动。3.根据权利要求1所述的起重机,其特征在于,所述系统配置成接收来自吊臂长度传感器的吊臂长度信息和来自提升角度传感器的提升角度信息。4.根据权利要求1所述的起重机,其特征在于,所述系统配置成在所述外伸支腿处于所述缩回状态的情况下监测所述被提升的负载。5.根据权利要求1所述的起重机,其特征在于,所述系统存储一个或多个负载图表,并且在所述经变换的操作半径下的额定能力根据所述一个或多个负载图表中的负载图表来确定。6.一种用于监测由起重机提升的负载的系统,所述起重机包括承载器单元和安装于所述承载器单元上的上部结构,所述上部结构包括伸缩吊臂,所述系统包括:处理器和配置成存储程序指令的非暂时性计算机可读存储介质,并且所述处理器配置成解释并执行所述程序指令以:确定由所述伸缩吊臂提升的负载;从设置于所述承载器单元上的坡度传感器接收所述承载器单元的俯仰和/或滚动信息;基于所述俯仰和/或滚动信息来调整所述起重机在坐标系中的坐标;使用所述经调整的坐标来确定经变换的操作半径;以及将所述被提升的负载与在所述经变换的操作半径下的额定能力进行比较。7.根据权利要求6所述的系统,其特征在于,所述系统进一步配置成基于所述被提升的负载与在所述经变换的操作半径下的额定能力的比较来控制所述伸缩吊臂的移动。8.一种用于监测由起重机提升的负载的方法,所述起重机包括:承载器单元,所述承载器单元具有底盘、连接到所述底盘的轮胎、承载器甲板以及外伸支腿;上部结构,所述上部结构安装于所述承载器单元上,所述上部结构包括伸缩吊臂;以及坡度传感器,所述坡度传
感器可操作地连接到所述承载器单元,并且配置成检测所述承载器单元在提升操作期间的俯仰和/或滚动;所述方法包括:确定由所述伸缩吊臂提升的负载;接收所述承载器单元的俯仰和/或滚动信息;基于所述俯仰和/或滚动信息来调整所述起重机在坐标系中的坐标;使用所述经调整的坐标来确定经变换的操作半径;以及将所述被提升的负载与在所述经变换的操作半径下的额定能力进行比较。
技术总结
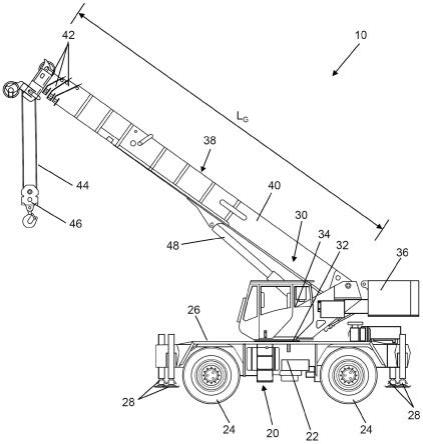
一种起重机(10)包括承载器单元(20),该承载器单元(20)具有底盘(22)、连接到底盘的轮胎(24)、承载器甲板(26)以及外伸支腿(28)。上部结构(30)安装于承载器单元上,上部结构包括伸缩吊臂(38)。坡度传感器(80)可操作地连接到承载器单元,并且配置成检测承载器单元在提升操作期间的俯仰和/或滚动。起重机进一步包括用于监测由伸缩吊臂提升的负载的系统(50)。该系统配置成:确定由伸缩吊臂提升的当前负载;从坡度传感器接收承载器单元的俯仰和/或滚动信息;基于俯仰和/或滚动信息来调整起重机在坐标系中的坐标;使用经调整的坐标来确定经变换的操作半径;以及将被提升的负载与在经变换的操作半径下的额定能力进行比较。操作半径下的额定能力进行比较。操作半径下的额定能力进行比较。
技术研发人员:S
受保护的技术使用者:马尼托瓦克起重机有限责任公司
技术研发日:2020.12.16
技术公布日:2022/9/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。