1.本发明涉及一种包装机械装置,尤其涉及一种用于包装的智能自动化包装机械装置。
背景技术:
2.封口机是将装有产品的容器进行封口机械,在产品装入包装容器后,为了使产品得以密封保存,保持产品质量,避免产品流失,需要对容器进行封口,这种操作是通过封口机完成的。
3.具有良好的热塑性塑料制作的塑料袋或复合袋,一般采用在封口处直接加热并施以机械压力,使封口熔合。
4.目前的热熔封口机分为全自动封口机和半自动封口机,全自动封口机造价较贵,中小型企业大多使用的是半自动封口机,半自动封口机需要人工捏住包装袋的入料口处,然后再启动半自动封口机下压封口,工人长期往复的封口,极易由于疲劳而导致压伤手部,且人工放置包装袋,一旦包装袋放偏,袋口虽封上了,但稍用力挤压或撕剥,封口便又开裂,这样的包装袋封口质量仍不合格,因为内容物在储运过程中经挤压很容易漏掉。
5.因此需要发明一种造价低于全自动封口机,中小型企业有能力批量采购,无需人工捏住袋口,包装袋可平稳放置,封口效果好的用于包装的智能自动化包装机械装置。
技术实现要素:
6.为了克服全自动封口机造价较贵,半自动封口机需要人工捏住包装袋的入料口处,然后再启动半自动封口机下压封口,工人长期往复的封口,极易由于疲劳而导致压伤手部,且人工放置包装袋,一旦包装袋放偏,袋口虽封上了,但稍用力挤压或撕剥,封口便又开裂的缺点,要解决的技术问题:提供一种造价低于全自动封口机,中小型企业有能力批量采购,无需人工捏住袋口,包装袋可平稳放置,封口效果好的用于包装的智能自动化包装机械装置。
7.技术方案如下:一种用于包装的智能自动化包装机械装置,包括有底座、转轴一、链轮、链条、置物盒、支架、安装架、转轴二、摆动架一、电热夹板、扭力弹簧一、输送驱动装置和夹板驱动装置,底座上部左右对称转动式安装有转轴一,两根转轴一中部均以键连接的方式安装有两个链轮,前侧的两个链轮之间连接有链条,后侧的两个链轮之间也连接有链条,前后两根链条之间均匀间隔安装有四个用于放置包装袋的置物盒,底座上部左侧通过螺栓安装有支架,支架内顶部焊接有安装架,安装架下部左右对称转动式安装有转轴二,两根转轴二上均安装有摆动架一,摆动架一下部安装有用于密封包装袋的电热夹板,摆动架一与安装架下部之间连接有扭力弹簧一,扭力弹簧一绕在转轴二上,底座下部左侧安装有输送驱动装置,输送驱动装置用于驱动置物盒及其内的包装袋绕着链条移动,支架中部安装有用于驱动夹板往中间靠拢的夹板驱动装置。
8.作为优选,输送驱动装置包括有安装板一、伺服电机和传动组件,底座左侧后部焊
接有安装板一,安装板一上通过螺栓安装有伺服电机,伺服电机的输出轴与左部转轴一后端之间连接有传动组件,传动组件由小皮带轮、大皮带轮和平皮带组成;通过启动伺服电机旋转,可实现通过传动组件驱动链轮和链条运作,从而可带动置物盒和其内的包装袋移动。
9.作为优选,夹板驱动装置包括有气缸、u形齿条和柱齿轮,支架中部穿接安装有气缸,气缸的伸缩杆末端焊接有u形齿条,左右两根转轴二中部均通过键连接的方式安装有柱齿轮,柱齿轮与u形齿条啮合;通过气缸带动u形齿条伸缩运动带动柱齿轮正反交替旋转,可实现通过柱齿轮带动电热夹板往中间靠拢或往外扩张。
10.作为优选,还包括有限位装置,限位装置包括有安装块、摆动架二、橡胶辊和扭力弹簧二,置物盒外上部左右两侧均焊接有安装块,两个安装块上均转动式安装有摆动架二,两个摆动架二上部均转动式安装有橡胶辊,两个摆动架二下部与安装块之间连接有扭力弹簧二;通过扭力弹簧二的弹力可驱动两个摆动架与其上的橡胶辊往中间靠拢,可实现橡胶辊对包装袋进行初步夹紧。
11.作为优选,还包括有限位驱动装置,限位驱动装置包括有凹块、u形架一、轮辊、安装板二和弧形块,两根转轴一之间安装有凹块,凹块左上部为凹陷状,置物盒前后两侧均滑动式安装有u形架一,两个u形架一底部位于置物盒外部,两个u形架一底部之间连接有轮辊,轮辊与凹块接触配合,左右两个摆动架二内侧均前后对称安装有安装板二,左部两个安装板二内侧均安装有弧形块,右部两个安装板二内侧也均弧形块,u形架一顶部穿出置物盒并与弧形块接触配合;通过u形架一带动轮辊绕着凹块移动,可实现通过凹块驱动u形架一往上移动顶开弧形块。
12.作为优选,还包括有排料辅助装置,排料辅助装置包括有u形架二、橡胶板、导向轮和驱动环槽,置物盒底部前后对称式穿接有两个u形架二,两个u形架二上端安装有橡胶板,橡胶板位于置物盒内底部,两个u形架二底部内侧均转动式安装有导向轮,凹块左右两侧均开有驱动环槽,驱动环槽左部为外突状,导向轮位于驱动环槽内;通过u形架二带动导向轮在驱动环槽内移动,可通过驱动环槽与导向轮的配合实现u形架二带动橡胶板往外移动。
13.作为优选,还包括有保护装置,保护装置包括有圆孔板和护罩,底座左右两侧中部均焊接有四个圆孔板,前侧四个圆孔板上通过螺栓安装有护罩,后侧四个圆孔板上也通过螺栓安装有护罩,前后两个护罩均位于底座内,前后两个护罩分别罩住前后两根链条。
14.本发明的有益效果为:
15.1、通过伺服电机的旋转,可驱动链条间歇性的移动预设好的距离,从而可带动链条上四个置物盒及其内的包装袋间歇性的移动,通过气缸带动u形齿条上下移动,便可驱动摆动架一和电热夹板往内合拢或者往外扩张打开,从而可实现对包装袋的密封;在置物盒不断的移动循环下,当置物盒移动至开口朝下时,置物盒内已被密封好的包装袋在重力的作用下便可排出,空的置物盒移动至右方时,操作者便可再次放入装好物品的包装袋,如此反复,便可不断的对装好物品的包装袋进行密封,也可将已被密封好的包装袋排出。
16.2、在摆动架二和橡胶辊的作用下,可避免装好物品的包装袋在移动时晃动错位,方便电热夹板对装好物品的包装袋进行密封。
17.3、通过u形架一的上下移动便可通过弧形块带动左右两方的摆动架二扩张或者合拢,如此便无需人工将左右两方的摆动架二掰开。
附图说明
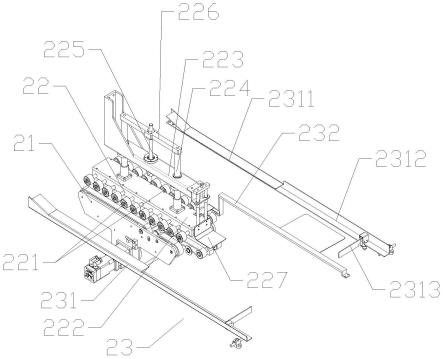
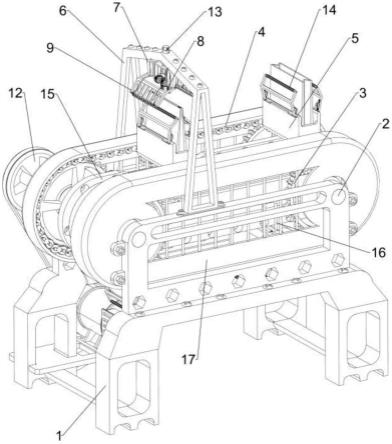
18.图1为本发明的第一种立体结构示意图。
19.图2为本发明的第二种立体结构示意图。
20.图3为本发明的第三种立体结构示意图。
21.图4为本发明的部分立体结构示意图。
22.图5为本发明夹板驱动装置的立体结构示意图。
23.图6为本发明气缸和u形齿条的立体结构示意图。
24.图7为本发明的部分剖视立体结构示意图。
25.图8为本发明凹块和驱动环槽的立体结构示意图。
26.图9为本发明限位驱动装置的立体结构示意图。
27.图10为本发明限位装置的立体结构示意图。
28.图11为本发明排料辅助装置的立体结构示意图。
29.图12为本发明底座和保护装置的立体结构示意图。
30.附图标记说明:1:底座,2:转轴一,3:链轮,4:链条,5:置物盒,6:支架,7:安装架,8:转轴二,9:摆动架一,10:电热夹板,11:扭力弹簧一,12:输送驱动装置,121:安装板一,122:伺服电机,123:传动组件,13:夹板驱动装置,131:气缸,132:u形齿条,133:柱齿轮,14:限位装置,141:安装块,142:摆动架二,143:橡胶辊,144:扭力弹簧二,15:限位驱动装置,151:凹块,152:u形架一,153:轮辊,154:安装板二,155:弧形块,16:排料辅助装置,161:u形架二,162:橡胶板,163:导向轮,164:驱动环槽,17:保护装置,171:圆孔板,172:护罩。
具体实施方式
31.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
32.实施例
33.一种用于包装的智能自动化包装机械装置,如图1-4所示,包括有底座1、转轴一2、链轮3、链条4、置物盒5、支架6、安装架7、转轴二8、摆动架一9、电热夹板10、扭力弹簧一11、输送驱动装置12和夹板驱动装置13,底座1上部左右对称转动式安装有转轴一2,两根转轴一2中部均以键连接的方式安装有两个链轮3,前侧的两个链轮3之间连接有链条4,后侧的两个链轮3之间也连接有链条4,前后两根链条4之间均匀间隔安装有四个用于放置包装袋的置物盒5,底座1上部左侧通过螺栓安装有支架6,支架6内顶部焊接有安装架7,安装架7下部左右对称转动式安装有转轴二8,两根转轴二8上均安装有摆动架一9,摆动架一9下部安装有用于密封包装袋的电热夹板10,摆动架一9与安装架7下部之间连接有扭力弹簧一11,扭力弹簧一11绕在转轴二8上,底座1下部左侧安装有输送驱动装置12,输送驱动装置12用于驱动置物盒5及其内的包装袋绕着链条4移动,支架6中部安装有用于驱动夹板往中间靠拢的夹板驱动装置13。
34.如图3-4所示,输送驱动装置12包括有安装板一121、伺服电机122和传动组件123,底座1左侧后部焊接有安装板一121,安装板一121上通过螺栓安装有伺服电机122,伺服电机122的输出轴与左部转轴一2后端之间连接有传动组件123,传动组件123由小皮带轮、大皮带轮和平皮带组成;通过启动伺服电机122旋转,可实现通过传动组件123驱动链轮3和链
条4运作,从而可带动置物盒5和其内的包装袋移动。
35.如图5-6所示,夹板驱动装置13包括有气缸131、u形齿条132和柱齿轮133,支架6中部穿接安装有气缸131,气缸131的伸缩杆末端焊接有u形齿条132,左右两根转轴二8中部均通过键连接的方式安装有柱齿轮133,柱齿轮133与u形齿条132啮合;通过气缸131带动u形齿条132伸缩运动带动柱齿轮133正反交替旋转,可实现通过柱齿轮133带动电热夹板10往中间靠拢或往外扩张。
36.首先操作者将装好物品的包装袋放置在右方的置物盒5内,然后操作者启动电热夹板10工作,随后操作者启动伺服电机122反转,通过传动组件123便可带动左部的转轴一2反转,左部的转轴一2便可带动左部的两个链轮3反转,左部的两个链轮3反转便可通过链条4带动右部的两个链轮3和右部的转轴一2反转,链条4便可带动右方放有包装袋的置物盒5往左移动,当右方放有包装袋的置物盒5往左移动至电热夹板10下方时,伺服电机122停止旋转,此时,右方下部的置物盒5便移动至前一个置物盒5所在的位置,操作者便可往该置物盒5内放入装好物品的包装袋,操作者再启动气缸131的伸缩杆往内缩短,气缸131的伸缩杆便可带动u形齿条132往上移动,u形齿条132往上移动便会带动左边的柱齿轮133反转,右边的柱齿轮133正转,左边的柱齿轮133便会带动左边的转轴二8、摆动架一9和电热夹板10反转摆动,右边的柱齿轮133便会带动右边的转轴二8、摆动架一9和电热夹板10正转摆动,如此,两个电热夹板10便会同时往中间靠拢,当左右两块电热夹板10夹住包装袋上方后,电热夹板10便可对包装袋进行密封,在扭力弹簧一11的作用下,左右两块电热夹板10夹紧包装袋时,左右两块电热夹板10可更加贴合包装袋;当包装袋密封后,操作者启动气缸131的伸缩杆往外移动,气缸131的伸缩杆便可带动u形齿条132往下移动,u形齿条132往下移动便会带动左边的柱齿轮133正转,右边的柱齿轮133反转,左边的柱齿轮133便会带动左边的转轴二8、摆动架一9和电热夹板10正转摆动,右边的柱齿轮133便会带动右边的转轴二8、摆动架一9和电热夹板10反转摆动,如此,两个电热夹板10便会同时往外摆动,从而可使电热夹板10与包装袋上部分离,此时,伺服电机122再旋转,左边置物盒5内已被密封好的包装袋便会顺着链条4的移动而逐渐倾倒,如此左边置物盒5已密封好的包装袋便会排出;当右方放有包装袋的置物盒5再次往左移动至电热夹板10下方时,伺服电机122停止旋转,包装袋密封完毕后,操作者依次关闭电热夹板10、伺服电机122和气缸131。通过伺服电机122的旋转,可驱动链条4间歇性的移动预设好的距离,从而可带动链条4上四个置物盒5及其内的包装袋间歇性的移动,通过气缸131带动u形齿条132上下移动,便可驱动摆动架一9和电热夹板10往内合拢或者往外扩张打开,从而可实现对包装袋的密封;在置物盒5不断的移动循环下,当置物盒5移动至开口朝下时,置物盒5内已被密封好的包装袋在重力的作用下便可排出,空的置物盒5移动至右方时,操作者便可再次放入装好物品的包装袋,如此反复,便可不断的对装好物品的包装袋进行密封,也可将已被密封好的包装袋排出。
37.如图9-10所示,还包括有限位装置14,限位装置14包括有安装块141、摆动架二142、橡胶辊143和扭力弹簧二144,置物盒5外上部左右两侧均焊接有安装块141,两个安装块141上均转动式安装有摆动架二142,两个摆动架二142上部均转动式安装有橡胶辊143,两个摆动架二142下部与安装块141之间连接有扭力弹簧二144;通过扭力弹簧二144的弹力可驱动两个摆动架与其上的橡胶辊143往中间靠拢,可实现橡胶辊143对包装袋进行初步夹紧。
38.如图8-11所示,还包括有限位驱动装置15,限位驱动装置15包括有凹块151、u形架一152、轮辊153、安装板二154和弧形块155,两根转轴一2之间安装有凹块151,凹块151左上部为凹陷状,置物盒5前后两侧均滑动式安装有u形架一152,两个u形架一152底部位于置物盒5外部,两个u形架一152底部之间连接有轮辊153,轮辊153与凹块151接触配合,左右两个摆动架二142内侧均前后对称安装有安装板二154,左部两个安装板二154内侧均安装有弧形块155,右部两个安装板二154内侧也均弧形块155,u形架一152顶部穿出置物盒5并与弧形块155接触配合;通过u形架一152带动轮辊153绕着凹块151移动,可实现通过凹块151驱动u形架一152往上移动顶开弧形块155。
39.往置物盒5内放入装好物品的包装袋时,操作者可通过双手将摆动架二142和橡胶辊143往外掰动,扭力弹簧二144随之扭转,此时操作者将装好物品的包装袋,然后操作者松开摆动架二142和橡胶辊143,在扭力弹簧二144的作用下,摆动架二142和橡胶辊143便会往中间靠拢,从而可对装好物品的包装袋上部进行限位。在摆动架二142和橡胶辊143的作用下,可避免装好物品的包装袋在移动时晃动错位,方便电热夹板10对装好物品的包装袋进行密封。
40.置物盒5移动式便带动u形架一152和轮辊153在凹块151上移动,当u形架一152和轮辊153移动至凹块151左上部凹陷处时,在扭力弹簧二144的作用下,便可通过左右两方的摆动架二142带动安装板二154和弧形块155往内移动夹紧包装袋上部,弧形块155往内收缩便会顶动u形架一152和轮辊153往下移动,当u形架一152和轮辊153移动至与凹块151左上部凹陷处分离后,u形架一152和轮辊153便会往上移动,u形架一152的顶端便会将左右两个弧形块155顶开,弧形块155便会带动左右两方的摆动架二142、安装板二154和弧形块155往外扩张。通过u形架一152和轮辊153在凹块151移动,在凹块151和其左上部凹陷的作用下,便可驱动u形架一152往上,或者往下移动,通过u形架一152的上下移动便可通过弧形块155带动左右两方的摆动架二142扩张或者合拢,如此便无需人工将左右两方的摆动架二142掰开。
41.如图8-11所示,还包括有排料辅助装置16,排料辅助装置16包括有u形架二161、橡胶板162、导向轮163和驱动环槽164,置物盒5底部前后对称式穿接有两个u形架二161,两个u形架二161上端安装有橡胶板162,橡胶板162位于置物盒5内底部,两个u形架二161底部内侧均转动式安装有导向轮163,凹块151左右两侧均开有驱动环槽164,驱动环槽164左部为外突状,导向轮163位于驱动环槽164内;通过u形架二161带动导向轮163在驱动环槽164内移动,可通过驱动环槽164与导向轮163的配合实现u形架二161带动橡胶板162往外移动。
42.如图12所示,还包括有保护装置17,保护装置17包括有圆孔板171和护罩172,底座1左右两侧中部均焊接有四个圆孔板171,前侧四个圆孔板171上通过螺栓安装有护罩172,后侧四个圆孔板171上也通过螺栓安装有护罩172,前后两个护罩172均位于底座1内,前后两个护罩172分别罩住前后两根链条4。
43.操作者将装好物品的包装袋放入置物盒5内时,装好物品的包装袋底部便位于橡胶板162上,当置物盒5带动密封好的包装袋移动至左边并倾斜时,导向轮163正好移动至驱动环槽164的外突处,此时在驱动环槽164外突处的作用下,导向轮163便会带动u形架二161和橡胶板162往外移动,从而可将置物盒5内密封好的包装袋顶出,避免密封好的包装袋被卡住而延迟排出。
44.当链轮3和链条4旋转时,在护罩172的作用下,可避免操作者的衣物,头发等异物被卷进链轮3和链条4内,可提高安全性。
45.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。