1.本发明涉及适于在扭矩以脉冲形式传递的情况下执行紧固操作的电动工具和用于控制电动工具的方法。
背景技术:
2.在扭矩以脉冲形式传递的紧固操作期间,希望控制紧固,使得将特定扭矩安装到连接处(join)。实现高精度也很重要。例如,关键的接合处(joint)以高精度紧固到正确的扭矩很重要。因此,电动工具经常适用于将螺纹(screw)接合处紧固到特定目标值。将接合处快速紧固同样重要,因为生产物件所用的时间也很重要。
3.为了实现精确和快速的紧固,电动工具必须采用正确的功率量来实现正确且快速的紧固。由于精度和速度往往是相反的情况,因此通常难以设定最佳的功率量。例如,如果需要快速紧固,则存在接合处紧固得很紧的风险。如果需要精确的紧固,完成紧固的速度通常很低。
4.因此,需要一种既能准确又能快速地紧固接合处的改进的电动工具。
技术实现要素:
5.本发明的目的是提供一种既能快速紧固接合处又能达到正确目标值的电动工具。
6.在根据现有技术的电动工具中,通过在固定时间内向电动工具中的马达施加固定电流来产生脉冲。因此,在整个紧固过程中,脉冲将具有相同的功率。
7.因此,对于现有技术的脉冲工具,即使接合处的特性在接合处的紧固过程中可能发生变化,所有脉冲也仅采用一个功率水平。因此,由于有时采用的功率太高,有时采用的功率太低,因此紧固的速度和精度没有得到优化。
8.本发明的一个目的是在紧固过程中、采用优化的脉冲功率解决或至少缓解问题。
9.根据本发明的第一方面,该目的通过适于执行紧固操作的电动工具来实现,其中扭矩以脉冲形式传递以紧固螺纹接合处。所述电动工具包括电动马达,其能驱动地连接到输出轴。处理器以及存储器,所述存储器存储软件指令,当由处理器执行时,所述软件指令使所述电动工具,检索至少第一功率水平参数p1,所述第一功率水平参数p1指示用于达到扭矩阈值的扭矩脉冲的第一功率水平。以及检索至少第二功率水平参数p2,所述第二功率水平参数p2指示用于高于扭矩阈值的扭矩脉冲的第二功率水平。此后,检索扭矩阈值,所述扭矩阈值指示高达应采用第一功率水平的扭矩。
10.然后控制电动马达的速度,使得电动工具向输出轴提供具有第一功率水平p1的扭矩脉冲直到达到扭矩阈值。以及控制电动马达的速度,使得电动工具向输出轴提供具有第二功率水平p2的扭矩脉冲。
11.根据第一方面,电动工具通过允许电动工具的用户在紧固的不同阶段期间对要采用的不同的功率水平进行设置,来提供对上述问题的创造性解决方案。因此,用户能够将功
率水平调整为例如在紧固开始时高到特定的扭矩阈值。并且将功率水平设置为高于特定的扭矩阈值的较低值,从而以接近目标扭矩的较低功率执行紧固。
12.因此,当将脉冲功率设置到特定的扭矩阈值时,通过考虑接合处的特性,可以调整功率,使得接合处尽可能快地紧固到特定的扭矩阈值。由于能够将功率设置为接近目标扭矩的较低值,因此也能够实现更精确的紧固。这种方法的优点是,脉冲的功率可以设置为适合紧固的不同阶段。由于脉冲的功率能够由用户依据接合处的情况来设置,因此能够实现紧固的更高的精度和速度。
13.根据一个实施方案,第一功率水平参数p1和第二功率水平参数p2表示为最大功率水平的百分比。此处,功率能够容易地调整到例如目标扭矩或任何其他目标值,使得在扭矩接近目标扭矩的情况下减小功率。而且,在扭矩远离目标扭矩或任何其他扭矩值的情况下,功率能够容易地增加。因此确保目标不超过目标扭矩。脉冲也能够设置为用户所希望的那种类型的紧固。较快的不太准确的紧固或较慢的更准确的紧固。
14.根据一个实施方案,脉冲由联接到电动马达的液压脉冲单元提供,所述液压脉冲单元通过液压联接机构将电动马达间歇联接到输出轴。因此,根据本发明的思想可以用于包括液压脉冲单元的电动工具中。从而提供在利用电动液压脉冲工具紧固期间设置脉冲功率的可能性。优点是在整个紧固过程中优化的功率水平。
15.根据一个实施方案,对电动马达的速度进行控制,使得电动马达以脉冲方式驱动,从而向输出轴提供脉冲。在该实施方案中,脉冲是由加速度提供的,存在于马达与输出轴之间的齿轮箱中的固有间隙(play)内的马达。在其他实施方案中,马达是在马达与输出轴之间设置的特定间隙(play)单元内加速的。因此,旋转能量在工具中建立。当马达与输出轴之间的间隙闭合时,这种旋转能量作为扭矩脉冲传递给螺杆。
16.根据第二方面,本发明涉及一种用于控制电动工具的方法,其中通过传递脉冲以紧固螺纹接合处,从而执行紧固操作。电动工具包括:电动马达,其能驱动地连接到输出轴。所述方法包括以下步骤:检索至少第一功率水平参数p1,所述第一功率水平参数p1指示用于达到扭矩阈值的扭矩脉冲的第一功率水平。检索至少第二功率水平参数p2,所述第二功率水平参数p2指示用于高于扭矩阈值的扭矩脉冲的第二功率水平。检索扭矩阈值参数,所述扭矩阈值参数指示高达应采用第一功率水平的扭矩。对电动马达的速度进行控制,使得电动工具向输出轴提供具有第一功率水平p1的扭矩脉冲直到达到扭矩阈值。
17.根据第二方面的实施方案的优点与根据第一方面的实施方案的优点相同,并且已经在上面关于第一方面的实施方案进行了描述。
附图说明
18.现在将参考附图更具体地描述本发明,在这些附图中:
[0019]-图1示出了根据本发明的示例性实施方案的穿过电动工具的纵向截面。
[0020]-图2示出了根据本发明的示例性实施方案的扭矩脉冲的示例图。
[0021]-图3示出了根据本发明的示例性实施方案的流程图。
具体实施方式
[0022]
下文将参考附图更全面地描述本发明的各方面。然而,本文所公开的设备、方法和
计算机程序能够以许多不同的形式实现,并且不应被认为限于本文所述的方面。图中的相似数字指的是贯穿始终的相似元件。
[0023]
本文使用的术语仅出于描述本发明的特定方面的目的,并不旨在限制本发明。正如本文所使用的,单数形式“一”、“一个”和“所述”旨在也包括复数形式,除非上下文另有清楚的说明。
[0024]
图1示出了根据本发明的实施方案的电动工具10的示例性实施方案。电动工具10进一步包括前端10a和后端10b。电动工具10进一步包括马达(motor)12。马达12包括转子14,转子14设置为相对于定子13旋转。输出轴16设置于壳体10的前端10a。根据所示的实施方案,电动工具10进一步包括联接到电动马达(electric motor)12的液压脉冲单元15。液压脉冲单元15通过液压联接机构将惯性驱动构件18间歇联接到输出轴16。液压脉冲单元15的功能是本领域技术人员已知的,在本技术中不再详细描述。在国际专利申请wo 91/14541中描述了脉冲单元的功能的更详细的描述。
[0025]
电动工具10进一步包括处理器20,所述处理器20设置为控制电动马达12。电动工具10还包括存储器26,所述存储器26包含可由处理器20执行的指令。
[0026]
发明人已经认识到,通过允许用户为紧固的不同阶段设置脉冲的功率,可以实现更高的精度和更快的紧固。
[0027]
该解决方案的优点在于可以在紧固的不同阶段将功率设置为最优化的,以实现高精度和速度。因此,本发明的一个方面涉及一种电动工具,其中,存储器26包含指令,当所述指令在电脉冲工具中运行时使电动工具控制电动马达12的速度,从而电动工具10向输出轴16提供具有第一功率水平p1的扭矩脉冲直到达到扭矩阈值。
[0028]
根据一个示例性实施方案,电动工具包括角度传感器(未示出),所述角度传感器设置为确定马达12的位置。根据一个示例性实施方案,角度传感器定位在马达12与惯性驱动构件18之间。然而,角度传感器可以位于电动工具中的其他地方。
[0029]
根据一个示例性实施方案,通过在预定时间间隔期间向电动马达12提供电流来确定脉冲的功率。根据另一示例性实施方案,通过在预定时间间隔期间向电动马达12提供电流并同时监测马达12的速度,来提供脉冲的功率。通过在预定的电流接通时间间隔期间向电动马达12提供电流并同时监测马达12的速度,能够实现特定的确定出的功率。如果在马达12的特定角度未达到所需功率,则能够向马达12提供新的电流脉冲。这是为了确保在马达12联接到输出轴16的时刻获得所需的马达功率。
[0030]
根据另一示例性实施方案,持续测量功率并且控制电流供给,从而在惯性驱动构件18联接到输出轴16的时刻达到功率,并且将脉冲提供给正在紧固的螺杆。根据又一示例性实施方案,通过连续监测马达12的实际位置并在确定功率时考虑该位置来控制马达12的功率。
[0031]
回到图1,处理器20是能够执行计算机程序代码的中央处理单元、cpu、微控制器、数字信号处理器、dsp或任何其他合适类型的处理器。存储器26是随机存取存储器、ram、只读存储器、rom或永久存储器,例如磁存储器、光存储器或固态存储器或甚至远程安装存储器的单个或组合。
[0032]
根据一个方面,本发明进一步涉及上述计算机程序,该计算机程序包括计算机可读代码,当在电动工具上运行时,该计算机可读代码使电动工具执行本文描述的本发明的
任何方面。
[0033]
根据本发明的一个方面,处理器20包括以下一个或数个:
[0034]-检索模块161,其适于检索至少第一功率水平参数p1,所述第一功率水平参数p1指示用于达到扭矩阈值的扭矩脉冲的第一功率水平,检索至少第二功率水平参数p2,所述第二功率水平参数p2指示用于高于扭矩阈值的扭矩脉冲的第二功率水平,并且检索扭矩阈值,所述扭矩阈值指示达到应采用第一功率水平的扭矩;
[0035]-控制模块162,其适于控制电动马达12的速度,使得电动工具10向输出轴16提供具有第一功率水平p1的扭矩脉冲直到达到扭矩阈值,并且控制电动马达12的速度,使得电动工具10向输出轴16提供具有第二功率水平p2的扭矩脉冲。
[0036]
控制模块161和162以硬件或软件或其组合来实现。根据一个方面,模块161和162实现为计算机程序,所述计算机程序在处理器20上运行、存储在存储器26中。电动工具进一步配置为实现如本文所述的本发明的所有方面。
[0037]
现在转到图2,其显示了由根据本发明的电动工具1执行的紧固中的若干脉冲的一个示例。图2包括三个图。顶部的图示出了脉冲的功率。中间的图示出了用于紧固的目标扭矩。下面的图示出了脉冲n的扭矩t(脉冲扭矩)。从图2的顶部的图中可以看出,在紧固过程中脉冲的功率是不同的。
[0038]
在示出的紧固中,脉冲的功率在开始时较低。由于未达到扭矩阈值,因此电动工具向输出轴16提供具有第一功率水平p1的扭矩脉冲。
[0039]
然后,由于已经达到扭矩阈值并且用户已将功率水平设置为扭矩阈值之后的更高值,脉冲的功率水平增加。随着脉冲的扭矩越来越接近目标扭矩,由于用户已经将脉冲的功率设置为更低的值,因此脉冲的功率减小以便以良好的精度到达目标扭矩。
[0040]
从图2中可以看出,电动工具可操作以重复脉冲,直到达到与螺纹接合处的紧固相关的参数值。在电动工具的示例性实施方案中,与螺丝接合处的紧固相关的参数值是扭矩。在电动工具的又一示例性实施方案中,与螺纹接合处的紧固相关的参数值是角度。
[0041]
本发明还涉及一种计算机可读存储介质,所述存储介质存储在计算机程序上,当在电脉冲工具中运行时,所述计算机程序使电脉冲工具如上所述地操作。
[0042]
根据一个示例性实施方案,当上述计算机程序代码在电动工具的处理器20中运行时,它使电动工具如上所述地操作。
[0043]
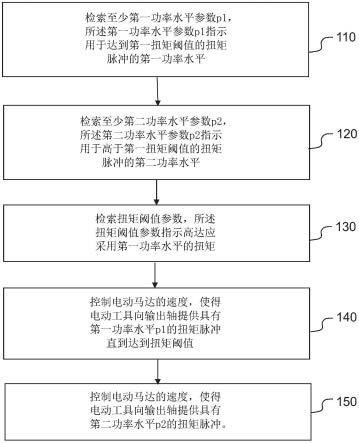
图3示出了用于控制电动工具的方法的流程图,其中通过传递脉冲来紧固螺纹接合处,从而执行紧固操作。电动工具10包括电动马达12,其可驱动地连接到输出轴16。所述方法包括步骤110,所述步骤110检索至少第一功率水平参数p1,所述第一功率水平参数p1指示用于达到扭矩阈值的扭矩脉冲的第一功率水平。在步骤120中,检索至少第二功率水平参数p2,所述第二功率水平参数p2指示用于高于扭矩阈值的扭矩脉冲的第二功率水平。接下来,在步骤130中,检索扭矩阈值,所述扭矩阈值指示高达应采用第一功率水平的扭矩。此后,在步骤140中,控制电动马达12的速度,使得电动工具10向输出轴16提供具有第一功率水平的扭矩脉冲直到达到扭矩阈值。然后,在步骤150中,控制电动马达12的速度,使得电动工具10向输出轴14提供具有第二功率水平p2的扭矩脉冲。
[0044]
根据另一示例性实施方案,其中,第一功率水平参数p1和第二功率水平参数p2表示为最大功率水平的百分比。在该方法的另一示例性实施方案中,所述脉冲由联接到电动
马达12的液压脉冲单元13提供,所述液压脉冲单元15通过液压联接机构将电动马达12间歇联接到输出轴16。在另一示例性实施方案中,对电动马达12的速度进行控制,使得电动马达以脉冲方式驱动,从而向输出轴16提供脉冲。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
