1.本发明涉及建筑模板回收领域,具体为一种建筑施工用废旧建筑模板回收处理装置。
背景技术:
2.建筑模板是一种临时性支护结构,按设计要求制作,使混凝土结构、构件按规定的位置、几何尺寸成形,保持其正确位置,并承受建筑模板自重及作用在其上的外部荷载,进行模板工程的目的,保证混凝土工程质量与施工安全、加快施工进度和降低工程成本,现有的建筑模板在长时间使用后会发生变形破损,并且表面会附着大量混凝土块,很难继续在建筑工地重复使用,此时废旧的建筑模板需要进行回收处理。
3.公告号为cn212144769u的中国专利公开了一种建筑施工用废旧建筑模板回收处理装置,包括带锯机与承载板,带锯机的正面固定安装有开关,承载板的顶部开设有两个滑槽二,带锯机通过滑槽二滑动连接有活动板。该一种建筑施工用废旧建筑模板回收处理装置,通过第一位移机构、驱动电机、螺纹杆一、滑杆、活动板、滑槽一、电动伸缩杆、传动块与固定块的配合使用,将粘附有凝固混凝土的一面切割下来,对废旧模板进行回收处理,改变了传统的打磨消除与腐蚀消除的方式,对建筑模板的损耗小,也降低了回收的成本,回收效果佳。
4.上述技术中对废旧模板粘附有凝固混凝土的一面直接切割,去除表面附着的混凝土块,或者直接采用粉碎机粉碎废旧模板,对废旧模板粘附有凝固混凝土的一面直接切割虽然可以达到去除混凝土的块的目的,但当废旧模板的数量较多,每一块附着混凝土块的模板的都需要切割,切割效率较低,使用效果不佳,而直接粉碎废旧模板会让原料中充满混凝土颗粒,需要经过沉淀过滤等方式进行分离,费时费力。
技术实现要素:
5.基于此,本发明的目的是提供一种建筑施工用废旧建筑模板回收处理装置,以解决一般废旧模板表面混凝土去除效果不是很好的技术问题。
6.为实现上述目的,本发明提供如下技术方案:一种建筑施工用废旧建筑模板回收处理装置,包括安装板与清洗箱,所述安装板的底部设置有清洗箱,所述清洗箱的内壁安装有超声波清洗机构,所述清洗箱的底部设置有支撑脚,所述支撑脚与清洗箱的接触位置设置有称重传感器;
7.所述安装板的顶部设置有安装架,所述安装架的内顶壁安装有横移机构,所述横移机构上活动设置有连接块,所述连接块的底部设置有固定架,所述固定架的内部安装有第一电机,所述第一电机的输出轴通过联轴器连接有转动轴,所述转动轴的外壁设置有一组链条,所述链条的中间设置有定位块,所述定位块的一侧设置有安装壳;
8.所述安装壳的内部设置有螺纹柱,所述螺纹柱的外壁设置有多个夹块,所述安装壳的内侧壁与一个所述夹块固定连接,所述夹块的侧壁设置有夹板,所述夹板的侧壁设置
有多个凸起,所述安装板顶部的一侧竖直设置有多个限位板,且限位板之间的间距与建筑模板的厚度相匹配。
9.通过采用上述技术方案,夹块对模板进行夹持,配合凸起,可以将附着的混凝土夹碎,夹块的夹持效果更好,称重传感器根据模板上混凝土的重量变化,调节超声波清洗机构的频率,以此来清洗模板上不同程度的混凝土粘结。
10.本发明进一步设置为,所述固定架的底部设置有一组导向柱,所述导向柱的底端连接有定位板,所述定位板的顶部设置有固定轴,且固定轴与链条配合安装,所述安装壳与导向柱滑动连接。
11.通过采用上述技术方案,导向柱为安装壳的移动进行限位导向。
12.本发明进一步设置为,所述夹板为可拆卸结构,且夹板的底部为铲型斜面结构。
13.通过采用上述技术方案,便于在增加夹块数量的同时添加夹板的数量,铲型斜面结构方便了对混凝土的去除。
14.本发明进一步设置为,所述安装壳的一侧安装有第二电机,所述第二电机的输出轴通过联轴器与螺纹柱相连接,所述安装壳的内壁设置有一组限位柱。
15.通过采用上述技术方案,第二电机控制螺纹柱的转动。
16.本发明进一步设置为,所述夹块的顶部皆设置有转动套,所述转动套之间连接有连接杆。
17.通过采用上述技术方案,转动套与连接杆控制夹块的运动。
18.本发明进一步设置为,所述清洗箱的内部设置有清洗液,且清洗液为生物降解型水泥清洗剂。
19.通过采用上述技术方案,生物降解型水泥清洗剂可以达到清洗混凝土的目的,不会对建筑模板造成损伤。
20.本发明进一步设置为,所述螺纹柱与一个所述夹块螺纹连接,其余所述夹块滑动连接于螺纹柱的外壁。
21.通过采用上述技术方案,螺纹柱旋转时,一个夹块运动,配合转动套与连接杆,可以拉动剩余的夹块同时运动。
22.本发明进一步设置为,所述清洗箱预埋于地底。
23.通过采用上述技术方案,预埋的清洗箱占用的空间体积更小。
24.综上所述,本发明主要具有以下有益效果:
25.1、本发明通过将待处理的建筑模板竖直放置于限位板之间,横移机构将固定架移至模板上方,随后升降机构带动安装壳下降,此时夹块在下降过程中将模板表面凸出的大块混凝土铲下,到达夹持位置时,夹块对模板进行夹持,配合凸起,可以将附着的混凝土夹碎,夹块的夹持效果更好,不会因为混凝土粘结导致模板固定效果变差;
26.2、本发明通过在模板夹持完毕后,安装壳带动夹块与模板同步上升,横移机构将模板移至清洗箱的上方,随后安装壳下降,将模板浸泡于清洗箱中,此时夹块微微松开,模板处于竖直状态,而清洗液可以对模板进行充分浸泡,清洗箱底部的称重传感器根据模板放置时上混凝土的重量,调节超声波清洗机构的频率,以此来清洗模板上不同程度的混凝土粘结,在满足模板清洗效果的同时,降低了能源的消耗,超声波清洗相较于传统的打磨清洁,混凝土清洁效果更好。
附图说明
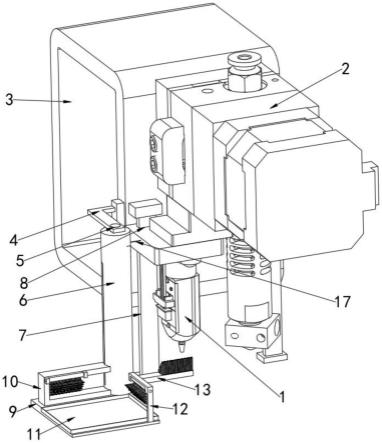
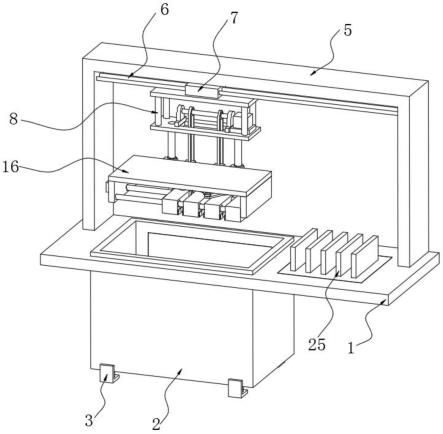
27.图1为本发明的结构连接示意图;
28.图2为本发明升降机构的结构示意图;
29.图3为本发明夹持机构的结构示意图;
30.图4为本发明清洗箱的结构示意图;
31.图5为本发明夹块与夹板的结构连接示意图;
32.图6为本发明图5的a处结构放大图
33.图7为本发明称重传感器与超声波清洗机构的工作流程图。
34.图中:1、安装板;2、清洗箱;3、支撑脚;4、称重传感器;5、安装架;6、横移机构;7、连接块;8、固定架;9、第一电机;10、转动轴;11、链条;12、定位板;13、固定轴;14、定位块;15、导向柱;16、安装壳;17、第二电机;18、螺纹柱;19、限位柱;20、夹块;21、夹板;22、凸起;23、转动套;24、连接杆;25、限位板;26、超声波清洗机构。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
36.下面根据本发明的整体结构,对其实施例进行说明。
37.一种建筑施工用废旧建筑模板回收处理装置,如图1-4所示,安装板1顶部的一侧竖直设置有多个限位板25,且限位板25之间的间距与建筑模板的厚度相匹配,安装板1的顶部设置有安装架5,安装架5的内顶壁安装有横移机构6,横移机构6由电机、螺纹杆等驱动机构组成,横移机构6上活动设置有连接块7,连接块7的底部设置有固定架8,固定架8的内部安装有第一电机9,第一电机9的输出轴通过联轴器连接有转动轴10,转动轴10的外壁设置有一组链条11,链条11的中间设置有定位块14,定位块14的一侧设置有安装壳16,安装壳16的内部设置有螺纹柱18,螺纹柱18的外壁设置有多个夹块20,安装壳16的内侧壁与一个夹块20固定连接,夹块20的侧壁设置有夹板21,夹板21的侧壁设置有多个凸起22,且凸起22表面呈环状分布开设有空隙;
38.先将待处理的建筑模板竖直插入限位板25之间,竖直插入可以将限位板25之间散落混凝土推出,随后横移机构6启动,将固定架8移至模板上方,第一电机9启动,转动轴10带动链条11旋转,使安装壳16沿着导向柱15下降,此时夹块20在下降过程中将模板表面凸出的大块混凝土铲下,到达夹持位置时,第二电机17启动,螺纹柱18进行旋转,推动夹块20对模板进行夹持,配合凸起22,可以将附着的混凝土夹碎,凸起22的空隙可以起到切割刀的作用,相较于传统的球形凸起,混凝土的破碎效果更好。
39.安装板1的底部设置有清洗箱2,且清洗箱2预埋于地底,清洗箱2的内壁安装有超声波清洗机构26,清洗箱2的底部设置有支撑脚3,支撑脚3与清洗箱2的接触位置设置有称重传感器4;
40.模板夹持完毕后,启动升降机构,此时第一电机9启动,转动轴10带动链条11旋转,使安装壳16沿着导向柱15上升,横移机构6将模板移至清洗箱2的上方,随后安装壳16下降,将模板浸泡于清洗箱2中,此时夹块20微微松开,模板落于清洗箱2的底部处于竖直状态,清
洗箱2底部的称重传感器4根据模板上混凝土的重量变化,调节超声波清洗机构26的频率,当清洗开始,模板表面的混凝土过多时,增强超声波清洗机构26的清洗频率,模板表面的混凝土较少时,降低超声波清洗机构26的清洗频率,根据需要进行调节,在满足模板清洗效果的同时,降低了能源的消耗。
41.请参阅图2,固定架8的底部设置有一组导向柱15,导向柱15的底端连接有定位板12,定位板12的顶部设置有固定轴13,且固定轴13与链条11配合安装,安装壳16与导向柱15滑动连接。
42.请参阅图3,夹板21为可拆卸结构,且夹板21的底部为铲型斜面结构。
43.请参阅图3,安装壳16的一侧安装有第二电机17,第二电机17的输出轴通过联轴器与螺纹柱18相连接,安装壳16的内壁设置有一组限位柱19,夹块20的顶部皆设置有转动套23,转动套23之间连接有连接杆24,螺纹柱18与一个夹块20螺纹连接,其余夹块20滑动连接于螺纹柱18的外壁,螺纹柱18旋转时,一个夹块20运动,配合转动套23与连接杆24,可以拉动剩余的夹块20同时运动。
44.请参阅图4,清洗箱2的内部设置有清洗液,且清洗液为生物降解型水泥清洗剂,生物降解型水泥清洗剂可以达到清洗混凝土的目的,不会对建筑模板造成损伤。
45.请参阅图1,清洗箱2预埋于地底,使用者需先于地面开设出一个与清洗箱2大小相同的安装槽,将清洗箱2用吊机吊入安装槽中,处于安装槽中的预埋清洗箱2占用的地面空间更小,即安装架5所需的尺寸更小,建造成本更低。
46.本发明的工作原理为:先将待处理的建筑模板通过运输车运至限位板25前,随后人工将竖直状态下的建筑模板插入限位板25之间,此时可以将限位板25之间散落混凝土推出,随后横移机构6启动,将固定架8移至模板上方,启动第一电机9,转动轴10带动链条11逆时针旋转,使安装壳16沿着导向柱15下降,此时夹板21在下降过程中将模板表面凸出的大块混凝土铲下,到达夹持位置时,启动第二电机17,螺纹柱18进行旋转,推动夹块20对模板进行夹持,配合凸起22,凸起22表面的空隙可以起到切割刀的作用,相较于传统的球形凸起,混凝土的破碎效果更好,由于建筑模板在使用过程中表面会附着大量混凝土,而夹块20在对建筑模板进行夹持时,凸出的混凝土会影响夹块20的夹持效果,甚至可能发生脱落的危险,同时建筑模板在进行清洗时,由于模板顶端处于夹持状态,故清洗液很难对顶端的混凝土进行浸泡清洗,进而夹板21与凸起22对模板顶部混凝土的预处理,有效的保证了模板能够顺利夹持运输和完成清洗工作;
47.模板夹持完毕后,第一电机9启动,转动轴10带动链条11顺时针旋转,使安装壳16沿着导向柱15上升,横移机构6将模板移至清洗箱2的上方,启动第一电机9,转动轴10带动链条11逆时针旋转,使安装壳16沿着导向柱15下降,随着安装壳16的下降,模板浸泡于清洗箱2中,此时夹块20松开,夹块20不在对模板产生夹持力,但模板基本呈竖直状态贴合于夹块20之间,此时称重传感器4将清洗箱2内部的重量转化为电信号,电信号传递至plc控制器对重量进行分析,由于模板的重量基本相同,故清洗箱2内部的重量取决于混凝土的多少,进而plc控制器可以根据清洗箱2的内部重量的调节超声波清洗机构26的频率,当清洗开始,模板表面的混凝土过多时,提升超声波清洗机构26中换能器的清洗功率,清洗槽壁将超声波辐射到槽中的清洗液,配合生物降解型水泥清洗剂对内部模板进行清洗,模板表面的混凝土较少时,降低超声波清洗机构26中换能器的清洗功率,根据需要进行调节,在满足模
板清洗效果的同时,降低了能源的消耗,模板清洗完毕后,启动第二电机17,夹块20对模板进行夹持,随后启动第一电机9,转动轴10带动链条11顺时针旋转,此时安装壳16提升,建筑模板离开清洗箱2,进行下一批次的模板清洗流程。
48.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本发明的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。