1.本发明涉及雷达、声纳技术领域,尤其涉及一种基于机器学习的水声信号处理算法。
背景技术:
2.信号的波达方向(doa)估计是水声信号处理中一个十分重要的方向,其主要目的是估计信号的空间位置,这也是雷达、声纳等许多领域的重要任务之一。其实现方法为得到信号在空间各个方向上的能量分布,进而估计出信号的波达方向。常用的方法为常规波束形成法、mvdr、music等。
3.现有的doa估计方法存在的问题主要有以下几个:1)常规波束形成法的分辨力受阵列孔径的限制,不具备很高的分辨能力,无法分辨两个相距较近的目标;2)一些高分辨算法在利用信号协方差矩阵时需要对其进行矩阵分解等操作,必须要求其为满秩,而包含相干信号的接收数据协方差矩阵不再为满秩矩阵,导致算法性能下降甚至失效;3)需要较大的快拍数,而实际工程应用中,快拍数一般十分有限,这将导致算法性能明显下降。
技术实现要素:
4.本发明的目的在于提供一种基于机器学习的水声信号处理算法,以解决上述背景技术中遇到的问题。
5.为实现上述目的,本发明的技术方案如下:
6.一种基于机器学习的水声信号处理算法,包括以下步骤:
7.步骤一、设定本方案的约束条件;阵列为均匀线列阵,阵元数为n,阵元间距为d;信源信号为远场窄带信号,阵元数要大于信号个数;传播介质是均匀且各向同性的;观测噪声为加性噪声,符合均值为0,方差为σ2的高斯分布,噪声与入射信号相互独立。
8.步骤二、设定每个波束上的信号方差为γ=[γ1,γ2,...γm]
t
∈rm,令γm=1,m=1,2,...m,设定加性噪声方差初始值σ2=0.1,设定收敛速度阈值ε
min
=0.001以及迭代次数最大值j
max
=500;
[0009]
步骤三、计算观测矩阵y的协方差矩阵σy,
[0010]
σy=σ2in aγah[0011]
其中,in为n阶单位矩阵,γ=diag(γ),a为阵列导向矢量矩阵,且a=[a1,...,am]∈cn×m,c为水中声速,ω为角频率,m为波束数,
[0012]
步骤四、采用em准则更新γ的第m个元素和噪声方差σ2;
[0013]
[0014][0015]
其中,l为快拍数,y为阵列观测数据矩阵,μ
x
为信源x的均值且
[0016]
步骤五、更新收敛速度ε=||γ
new-γ
old
||1/||γ
old
||1;
[0017]
步骤六、迭代步骤三至步骤五,直到收敛速度大于阈值或者达到最大迭代次数;
[0018]
步骤七、输出γ
new
和(σ2)
new
,根据γ
new
确定来波方向。
[0019]
与现有技术相比,本发明的有益效果是:采用em准则估计信号和噪声的功率,使水声信号处理算法可得到超分辨的谱估计。与传统方法相比,该算法无需已知信号的数量,可用于低信噪比、快拍数较少情况下的相干信号的处理。
附图说明
[0020]
参照附图来说明本发明的公开内容。应当了解,附图仅仅用于说明目的,而并非意在对本发明的保护范围构成限制。在附图中,相同的附图标记用于指代相同的部件。其中:
[0021]
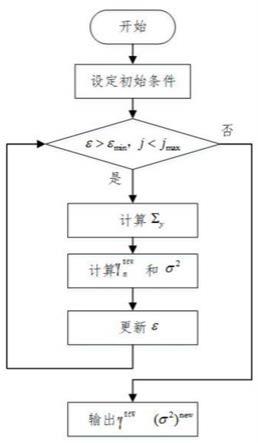
图1为本发明基于机器学习的水声信号处理算法的流程图。
具体实施方式
[0022]
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示本发明有关的构成。
[0023]
根据本发明的技术方案,在不变更本发明实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,以下具体实施方式以及附图仅是对本发明的技术方案的示例性说明,而不应当视为本发明的全部或者视为对本发明技术方案的限定或限制。
[0024]
下面结合附图和实施例对本发明的技术方案做进一步的详细说明。
[0025]
如图1所示,一种基于机器学习的水声信号处理算法,包括以下步骤:
[0026]
步骤一、设定本方案的约束条件:阵列为均匀线列阵,阵元数为n,阵元间距为d;信源信号为远场窄带信号,阵元数要大于信号个数;传播介质是均匀且各向同性的;观测噪声为加性噪声,符合均值为0,方差为σ2的高斯分布,噪声与入射信号相互独立。
[0027]
设定波束数为m,快拍数为l,信源信号矩阵可表示为x=[x1,...,x
l
]∈cm×
l
。线性回归模型,阵元数为n的阵列观测矩阵y可表示为:y=ax n
[0028]
其中,a为导向矢量矩阵a=[a1,a2,...,am]∈cn×m,,n为加性高斯噪声n∈cn×
l
。
[0029]
步骤二、设定每个波束上的信号方差功率为γ=[γ1,γ2,...γm]
t
∈rm,令γm=1,m=1,2,...m,设定加性噪声方差初始值σ2=0.1,设定收敛速度阈值ε
min
=0.001以及迭代次数最大值j
max
=500;
[0030]
步骤三、计算观测矩阵y的协方差矩阵σy,
[0031]
σy=σ2in aγah[0032]
其中,in为n阶单位矩阵,γ=diag(γ),c为水中声速,ω为角频率,m为波束数,
[0033]
观测矩阵y服从高斯分布:
[0034][0035]
根据先验信息,信源信号符合零均值的高斯分布,每个波束上的信号的方差(能量)为γm∈γ=[γ1,...γm]
t
。信源信号的均值和方差为:
[0036][0037][0038]
其中γ=diag(γ),σy为观测矩阵y的协方差矩阵:σy=σ2in aγah,in为n阶单位矩阵。
[0039]
在本步骤中,本算法中并未对协方差矩阵做矩阵分解等操作,所以协方差矩阵是否满秩并无影响。
[0040]
步骤四、采用em准则更新γ的第m个元素和噪声方差σ2;
[0041][0042][0043]
其中,l为快拍数,y为阵列观测数据矩阵,μx为信源x的均值且通过上式迭代求解出最终的解。
[0044]
步骤五、更新收敛速度定义为ε=||γ
new-γ
old
||1/||γ
old
||1;
[0045]
步骤六、迭代步骤三至步骤五,直到收敛速度大于阈值或者达到最大迭代次数;当收敛速度小于设置的阈值,γ会收敛于一个比较稳定的值,此时迭代即可停止。
[0046]
步骤七、输出信号在各个方向上的功率γ
new
和(σ2)
new
,根据γ
new
确定来波方向。
[0047]
本发明专利中,叙述了一种基于机器学习的水声信号处理算法,采用em准则估计信号和噪声的功率,使水声信号处理算法可得到超分辨的谱估计。与传统方法相比,该算法无需已知信号的数量,可用于低信噪比、快拍数较少情况下的相干信号的处理。
[0048]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式,并不用于限定本发明保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。