1.本发明涉及脊柱治疗技术领域,具体为一种新型骨科机器人术中实时导航导向器。
背景技术:
2.手术是治疗脊柱退行性病变的重要手段,其中对于脊柱力学结构已经出现不稳的患者,手术往往需要进行椎体的融合固定。融合固定手术中难度较大的步骤无疑是对于螺钉植入通道的钻制,稍有不慎就会出现损伤周围血管引起出血,或是损伤神经导致肢体感觉功能障碍的现象。随着微创理念不断深入人心,脊柱微创手术已广泛开展,但微创的术式往往意味着手术视野的局限,这对于临床疑难病例的手术治疗以及对手术操作尚未熟练的年轻医生更是延长了学习曲线。
3.机器人导航辅助技术是运用机器人导航系统对外科手术过程中的重要步骤进行辅助。机器人系统手术中所独有的特点,如稳定性和精确性深受医生和患者的共同认可,特别是在骨科手术中应用机器人,在近年来取得了长足的发展。目前较为普及的骨科机器人导航系统(以天玑骨科机器人为例,如下图)往往要由主机、机械臂、光学跟踪系统、主控台车(含手术计划与控制系统)和导航定位工具包5个部件组成,根据不同手术需求,导航定位工具包分为创伤和脊柱2种导航定位工具套件。内置图像处理软件对手术部位的二维或三维图像进行校正处理以减少图像失真度,基准法和形态法相结合以实现手术导航跟踪基准法为在校正后图像中摆放虚拟植入物以设置手术路径的位置坐标,用于规划机械臂运动轨迹,手术医生向机械臂发送控制指令控制其基座 肩部 肘部 手腕1 手腕2和手腕3这6个部件的电机沿着规划运动路径向指定位置移动;形态法为应用光学跟踪系统实时跟踪患者和机械臂的相对位置变化以建立坐标系数据,手术计划与控制系统再根据相关数据计算手术植入物与规划的手术路径实时相对位置,以实现机械臂在移动过程中的定位补偿。但是目前机器人导航辅助系统也存在的缺点:(1)触觉反馈缺乏:在脊柱外科手术中,操作者可以通过触觉反馈后,对手术所有的操作进行准确及时的判断,特别在软组织的操作中,体现的更加明显,而骨科机器人系统,却无该项方面的功能;(2)局限性:目前应用广泛的机器人系统在脊柱外科的手术中,虽然能做定位及手术路线的规划,但对于复杂的操作如植入通道钻制无能为力。此外,目前机器人在脊柱手术领域主要用于引导椎弓根螺钉植入,没有专用的工具用以经皮椎间孔镜等微创手术的建立工作通道的引导,因此具有一定的局限性。
技术实现要素:
4.(一)解决的技术问题针对现有技术的不足,本发明提供了一种新型骨科机器人术中实时导航导向器,解决了传统的骨科机器人术中实时导航导向器使用时缺乏反馈触觉和使用时出现局限性
的问题。
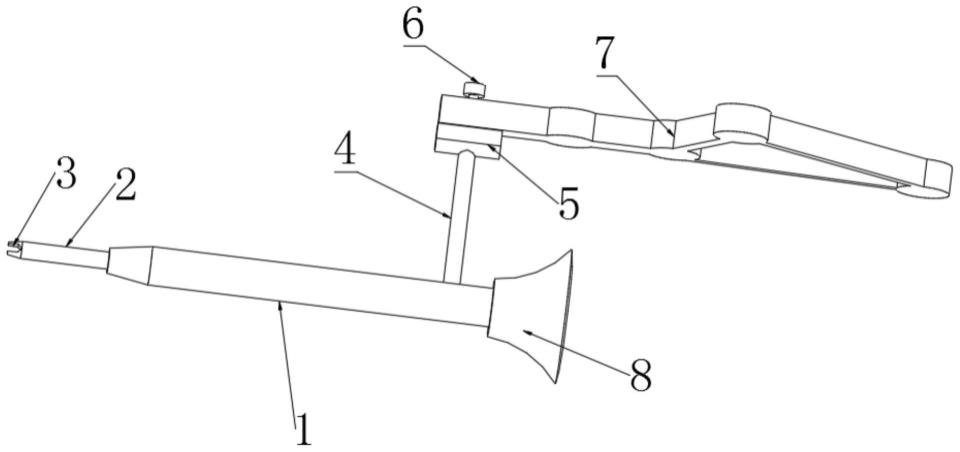
5.(二)技术方案为实现以上目的,本发明通过以下技术方案予以实现:一种新型骨科机器人术中实时导航导向器,包括针杆,所述针杆下端面固定连接有探针,所述探针一端设置有圆齿型凹槽,所述针杆外表面固定连接有连接杆,所述连接杆一端固定连接有弧形块,所述弧形块通过固定螺栓固定连接有光学信号接收器,所述探针一端安装有螺钉卡槽。
6.优选的,所述螺钉卡槽内腔与外界追踪系统连接。
7.优选的,所述光学信号接收器共设置有4个。
8.有益效果本发明提供了一种新型骨科机器人术中实时导航导向器。具备以下有益效果:(1)、该新型骨科机器人术中实时导航导向器,通过新型导向器可以采取手动操作,比起传统导向器下的操作,进行细小调整时更为灵活。
9.(2)、该新型骨科机器人术中实时导航导向器,通过手术的关键步骤由主刀医生进行,机器人导航导向器进行辅助,可以避免机器算法偏差或系统故障造成的不当操作。
10.(3)、该新型骨科机器人术中实时导航导向器,通过手术操作流程进一步可视化,更加保证了手术操作的安全性。
11.(4)、本导航导向器,增长了导杆长度,改进了导向器尖端的尖齿形态,并进行了导杆中空设计,可用于机器人导航经皮椎间孔镜手术的穿刺引导,解决了机器人手术不能用于经皮椎间孔镜手术的问题。
附图说明
12.图1为本发明整体结构示意图;图2为本发明另一视角整体结构示意图;图3为本发明使用流程结构示意图。
13.图中:1、针杆;2、探针;3、圆齿型凹槽;4、连接杆;5、弧形块;6、固定螺栓;7、光学信号接收器;8、螺钉卡槽。
具体实施方式
14.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
15.请参阅图1-3,本发明提供一种技术方案:实施例一:一种新型骨科机器人术中实时导航导向器,包括针杆1,针杆1下端面固定连接有探针2,探针2一端设置有圆齿型凹槽3,针杆1外表面固定连接有连接杆4,连接杆4一端固定连接有弧形块5,弧形块5通过固定螺栓6固定连接有光学信号接收器7,探针2一端安装有螺钉卡槽8。螺钉卡槽8内腔与外界追踪系统连接。光学信号接收器7共设置有4个。
16.工作时,使用时,首先将探针2经皮切口进入皮下抵达椎体骨骼表面后,探针需要通过配合光学跟踪系统及三维成像规划植入通道,必要时还可能需要进一步进行凿骨等操作,故需要足够的长度以及对探针结构进行改良,由于探针的前端,由原本单一的尖齿增加
设计了圆齿型凹槽3,从而可以应对不同的操作要求,同时由于在现有的探针2长度上进行了改进,将探针2,加长的探针2能够为手术提供更充分的操作机会,由于探针的尾端,留有一个可以与追踪系统连接的螺钉卡槽8。且该螺钉卡槽8采用一个高分子合成材料制成套头,增大了尾端的接触面积,可以在进行凿骨等操作时通过叩击尾端套头来达到深层次进针的操作,足够的接触面积也保证了叩击敲打的准确率,最后该装置通过四个光学信号接收器7配合外界的新型跟踪系统可以确保手术操作流程进一步可视化,更加保证了手术操作的安全性,但是该新型跟踪系统是基于原有的导航定位工具包。当用于经皮椎间孔镜手术的导航时,使用时,首先在距离后正中线约8-12cm(视病人胖瘦、手术节段和不同病理类型而定)处,做1cm皮肤切口,并置入加长型针杆1(28cm),在导航可视化引导下将探针2放置到椎间孔区,采用圆齿型凹槽3解除椎间孔区,沿着中空设计的导杆,置入导丝或克氏针,再移除导航导向器,沿着导丝或克氏针置入软组织扩张器和工作通道,实施一次精准穿刺置管。
17.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
技术特征:
1.一种新型骨科机器人术中实时导航导向器,包括针杆(1),其特征在于:所述针杆(1)下端面固定连接有探针(2),所述探针(2)一端设置有圆齿型凹槽(3),所述针杆(1)外表面固定连接有连接杆(4),所述连接杆(4)一端固定连接有弧形块(5),所述弧形块(5)通过固定螺栓(6)固定连接有光学信号接收器(7),所述探针(2)一端安装有螺钉卡槽(8)。2.根据权利要求1所述的一种新型骨科机器人术中实时导航导向器,其特征在于:所述螺钉卡槽(8)内腔与外界追踪系统连接。3.根据权利要求1所述的一种新型骨科机器人术中实时导航导向器,其特征在于:所述光学信号接收器(7)共设置有4个。
技术总结
本发明公开了一种新型骨科机器人术中实时导航导向器,包括针杆,所述针杆下端面固定连接有探针,所述探针一端设置有圆齿型凹槽,所述针杆外表面固定连接有连接杆,所述连接杆一端固定连接有弧形块,所述弧形块通过固定螺栓固定连接有光学信号接收器,所述探针一端安装有螺钉卡槽,本发明涉及脊柱治疗技术领域。该新型骨科机器人术中实时导航导向器,解决了传统的骨科机器人术中实时导航导向器使用时缺乏反馈触觉和使用时出现局限性的问题。缺乏反馈触觉和使用时出现局限性的问题。缺乏反馈触觉和使用时出现局限性的问题。
技术研发人员:陈博来 林涌鹏 李永津
受保护的技术使用者:广东省中医院(广州中医药大学第二附属医院、广州中医药大学第二临床医学院、广东省中医药科学院)
技术研发日:2022.07.26
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。