1.本发明属于汽车驾驶决策技术领域,具体涉及一种智能网联汽车风险评估方法及个性化决策方法。
背景技术:
2.基于新一代通信技术的智能网联汽车能够有效解决单车自动驾驶所面临的技术瓶颈,是当前自动驾驶和智能交通领域研究的热点。智能决策作为智能网联汽车的重要组成模块,对车辆的安全行驶和道路交通安全有着至关重要的影响。如何在复杂的驾驶场景下,有效评估周围交通参与者所形成的驾驶风险,进而做出合理、有效决策,是当下智能网联汽车所面临的关键问题之一。
3.现有基于驾驶风险评估的车辆智能决策研究,在对驾驶风险进行评估时大多只考虑了主车与周围车辆之间的速度和距离因素,评价指标如碰撞时间、车头时距等。然而,这种决策方法存在一定问题:第一,在进行驾驶风险评估时,考虑的影响因素较少,使得风险评估结果不准确;第二,仅考虑了纵向或横向的单维度驾驶风险,风险评估维度单一;第三,不同类型的驾驶人或乘客具有不同的驾驶风险心理阈值,基于同一驾驶风险标准进行车辆智能决策,无法满足驾驶人或乘客对驾驶舒适性的需求。
4.由此可见,现有的基于风险评估的车辆智能决策方法及相关技术难以满足智能网联汽车的发展需求。
技术实现要素:
5.有鉴于此,本发明提供了一种智能网联汽车风险评估方法及个性化决策方法,使得驾驶风险评估准确,风险考虑维度全面且能够满足不同类型驾驶人或乘客舒适性需求。
6.本发明是通过下述技术方案实现的:
7.一种智能网联汽车风险评估方法,包括:根据智能网联环境下智能网联车辆装备的传感器及车路协同感知设施获取的用于驾驶风险评估的数据,数据包括主车数据和周围车辆数据,利用行车安全场模型分别计算各周围车辆对主车产生的驾驶风险;
8.其中,主车数据包括主车的物理质量、横向坐标、纵向坐标、速度以及加速度;周围车辆数据包括各周围车辆的物理质量、横向坐标、纵向坐标、长度、宽度、速度和加速度。
9.进一步的,根据各周围车辆对主车产生的驾驶风险,分别加权计算主车所受跟驰风险和换道风险。
10.进一步的,所述利用行车安全场模型分别计算各周围车辆对主车产生的驾驶风险的方式为:
11.步骤s11,根据某一周围车辆a的物理质量和速度,计算得到周围车辆a的风险质量;
12.步骤s12,一方面,周围车辆a的风险质量结合主车的横向坐标和纵向坐标以及周围车辆a的横向坐标、纵向坐标、长度和宽度计算得到周围车辆a的势能风险场强;另一方
面,周围车辆a的风险质量结合主车的横向坐标、纵向坐标以及周围车辆a的横向坐标、纵向坐标、长度、宽度和速度计算得到周围车辆a的动能风险场强;
13.步骤s13,将步骤s12中得到的周围车辆a的势能风险场强和动能风险场强结合得到周围车辆a的风险场强;
14.步骤s14,根据步骤s13得到的周围车辆a的风险场强,结合主车的物理质量、速度和加速度以及周围车辆a的速度计算周围车辆a对主车产生的驾驶风险;
15.步骤s15,根据步骤s11-s14分别计算各周围车辆对主车产生的驾驶风险。
16.进一步的,步骤s12中所述周围车辆a的风险质量结合主车的横向坐标和纵向坐标以及周围车辆a的横向坐标、纵向坐标、长度和宽度计算得到周围车辆a的势能风险场强的计算公式为:
[0017][0018]
其中,e
sv_sta
为周围车辆a的势能风险场强,a为大于0的场强系数,m
sv
为步骤s11中得到的周围车辆a的风险质量,x
ev
为主车纵向坐标,x
sv
为周围车辆a的纵向坐标,w
x
为周围车辆a长度的权重系数,l
sv
为周围车辆a的长度,y
ev
为主车纵向坐标,y
sv
为周围车辆a的横向坐标,wy为周围车辆a宽度的权重系数,w
sv
为周围车辆a的宽度,d为主车与周围车辆a的距离矢量,d=(x
ev-x
sv
,y
ev-y
sv
)。
[0019]
进一步的,步骤s12中所述周围车辆a的风险质量结合主车的横向坐标、纵向坐标以及周围车辆a的横向坐标、纵向坐标、长度、宽度和速度计算得到周围车辆a的动能风险场强的计算公式为:
[0020][0021]
其中,e
sv_va
为周围车辆a的动能风险场强,a为大于0的场强系数,m
sv
为步骤s11中得到的周围车辆a的风险质量,x
ev
为主车纵向坐标,x
sv
为周围车辆a的纵向坐标,α为与周围车辆a的速度相关的权重系数,v
sv
为周围车辆a的速度,w
x
为周围车辆a长度的权重系数,l
sv
为周围车辆a的长度,y
ev
为主车纵向坐标,y
sv
为周围车辆a的横向坐标,wy为周围车辆a宽度的权重系数,w
sv
为周围车辆a的宽度,θ为某周围车辆a的速度方向与d的夹角,顺时针方向为正;γ为与夹角θ相关的权重系数;β为与周围车辆a的加速度有关的权重系数,a
sv
为某周围车辆a的加速度,d为主车与周围车辆a的距离矢量,d=(x
ev-x
sv
,y
ev-y
sv
)。
[0022]
进一步的,所述步骤s14的计算公式为:
[0023][0024]
其中,r
ev
为周围车辆a对主车产生的驾驶风险,e
sv
为步骤s13得到的周围车辆a的风险场强,m
ev
为主车的物理质量;wv为主车与周围车辆a的相对速度|v
ev-v
sv
|的权重系数;v
ev
为主车速度;v
sv
为某周围车辆速度;wa为主车加速度的权重系数;a
ev
为主车加速度。
[0025]
进一步的,根据前方周围车辆、左前方周围车辆和右前方周围车辆对主车产生的驾驶风险加权计算主车所受跟驰风险;
[0026]
根据左前方周围车辆、左后方周围车辆、右前方周围车辆和右后方周围车辆对主
车产生的驾驶风险加权计算主车所受换道风险。
[0027]
一种智能网联汽车个性化决策方法,基于上述智能网联汽车风险评估方法,包括:选定驾驶风格,分别将主车所受驾驶风险与驾驶风格对应的驾驶风险阈值进行对比,从而确定主车的驾驶状态。
[0028]
进一步的,所述驾驶风险包括跟驰风险和换道风险,所受驾驶风险阈值包括跟驰风险阈值和换道风险阈值;
[0029]
将主车所受驾驶风险与驾驶风格对应的驾驶风险阈值进行对比,从而确定主车的驾驶状态的方式为:
[0030]
当主车面临的跟驰风险小于等于跟驰风险阈值,主车正常行驶;
[0031]
当主车面临的跟驰风险大于跟驰风险阈值时,将主车面临的左、右侧换道风险与驾驶风格对应的换道风险阈值分别进行对比,分为以下四种情况:
[0032]
若左侧换道风险和右侧换道风险均小于等于换道风险阈值,则主车进行左侧换道或者右侧换道;
[0033]
若左侧换道风险小于等于换道风险阈值且右侧换道风险大于换道风险阈值,则主车进行左侧换道;
[0034]
若左侧换道风险大于换道风险阈值且右侧换道风险小于等于换道风险阈值,则主车进行右侧换道;
[0035]
若左侧换道风险和右侧换道风险均大于等于换道风险阈,则主车执行制动。
[0036]
进一步的,所述跟驰风险阈值和换道风险阈值的确定方式为:基于公开自然驾驶数据集,聚类分析驾驶人真实道路驾驶情况下的跟驰风险和换道风险,将其划分为三类,三个类簇的聚类中心分别相应的作为激进、正常、保守型驾驶风格的跟驰风险阈值和换道风险阈值。
[0037]
有益效果:
[0038]
(1)本发明中主车数据包括主车的物理质量、横向坐标、纵向坐标、速度以及加速度;周围车辆数据包括各周围车辆的物理质量、横向坐标、纵向坐标、长度、宽度、速度和加速度。本发明以行车安全场模型为基础,综合考虑主车的物理质量、横向坐标、纵向坐标、速度、加速度和周围车辆的物理质量、横向坐标、纵向坐标、长度、宽度、速度、加速度以及航向角等多个因素,从而准确计算周围各车辆对主车造成的驾驶风险。
[0039]
(2)本发明根据各周围车辆对主车产生的驾驶风险,分别加权计算主车所受跟驰风险和换道风险。本发明通过对周围车辆单车造成的驾驶风险进行加权计算,获得主车受纵向跟驰风险和横向换道风险,综合考虑横、纵两个维度的驾驶风险,进一步保证了行车安全。
[0040]
(3)本发明通过周围车辆a的风险质量结合主车的横向坐标和纵向坐标以及周围车辆a的横向坐标、纵向坐标、长度和宽度,计算得到周围车辆a的势能风险场强。在现实中,车辆尺寸越大,其产生的的风险越大,且对不同的方向具有不同的影响,本发明引入车辆几何属性,解决了原势能场模型将车辆看作只有质量没有尺寸的质点,势能场为圆形,并未考虑车辆的几何尺寸的问题,且以二维高斯函数为基础采用四阶中心矩展平函数的峰顶,从而使得静止车辆的势能场更加准确。
[0041]
(4)本发明通过周围车辆a的风险质量结合主车的横向坐标、纵向坐标以及周围车
辆a的横向坐标、纵向坐标、长度、宽度和速度计算得到周围车辆a的动能风险场强。除了引入了车辆几何属性进行计算,还考虑到周围车辆速度对横、纵两个方向具有不同的影响,在动能场模型中引入周围车辆速度,以计算周围车辆速度在横纵不同方向的影响,进一步提高周围车辆的动能风险场强计算的准确性。
[0042]
(5)本发明根据步骤s13得到的周围车辆a的风险场强,结合主车的物理质量、速度和加速度以及周围车辆a的速度计算周围车辆a对主车产生的驾驶风险,考虑到主车面临的风险与两车的相对速度有关,而非仅与主车速度有关,所以在最终的周围车辆对主车产生的驾驶风险计算公式中,引入辆车相对速度,同时还引入了主车加速度,进一步提升风险评估的准确性。
[0043]
(6)本发明根据前方周围车辆、左前方周围车辆和右前方周围车辆对主车产生的驾驶风险加权计算主车所受跟驰风险;根据左前方周围车辆、左后方周围车辆、右前方周围车辆和右后方周围车辆对主车产生的驾驶风险加权计算主车所受换道风险。因为主车所受跟驰风险的数值大小主要受前方周围车辆、左前方周围车辆和右前方周围车辆的影响,所以无需考虑其他周围车辆对主车产生的驾驶风险;因为主车所受换道风险,其数值大小主要受主车相邻车道车辆影响,所以无需考虑前方周围车辆对主车产生的驾驶风险。
[0044]
(7)本发明通过选定驾驶风格,分别将主车所受驾驶风险与驾驶风格对应的驾驶风险阈值进行对比,从而确定主车的驾驶状态。本发明在驾驶人或乘客选定驾驶风格后,将其对应阈值与主车面临的驾驶风险进行对比判断后,确定主车的驾驶状态,实现了车辆个性化智能决策,使得决策符合驾驶人或乘客对舒适的驾驶风格的要求。
[0045]
(8)本发明将主车所受驾驶风险与驾驶风格对应的驾驶风险阈值进行对比,从而确定主车的驾驶状态的方式为:当主车面临的跟驰风险小于等于跟驰风险阈值,主车正常行驶;当主车面临的跟驰风险大于跟驰风险阈值时,将主车面临的左、右侧换道风险与驾驶风格对应的换道风险阈值分别进行对比,分为以下四种情况:若左侧换道风险和右侧换道风险均小于等于换道风险阈值,则主车进行左侧换道或者右侧换道;若左侧换道风险小于等于换道风险阈值且右侧换道风险大于换道风险阈值,则主车进行左侧换道;若左侧换道风险大于换道风险阈值且右侧换道风险小于等于换道风险阈值,则主车进行右侧换道;若左侧换道风险和右侧换道风险均大于等于换道风险阈,则主车执行制动。本发明先进行跟驰风险的对比,再进行换道风险风险的对比,在保证个性化决策的同时,同时保证了主车的行车安全。
[0046]
(9)本发明基于公开自然驾驶数据集,聚类分析驾驶人真实道路驾驶情况下的跟驰风险和换道风险,将其划分为三类,三个类簇的聚类中心分别相应的作为激进、正常、保守型驾驶风格的跟驰风险阈值和换道风险阈值。通过聚类分析还可以不受三种类型的限制,可进一步划分类型,满足不同驾驶风格的需求。
附图说明
[0047]
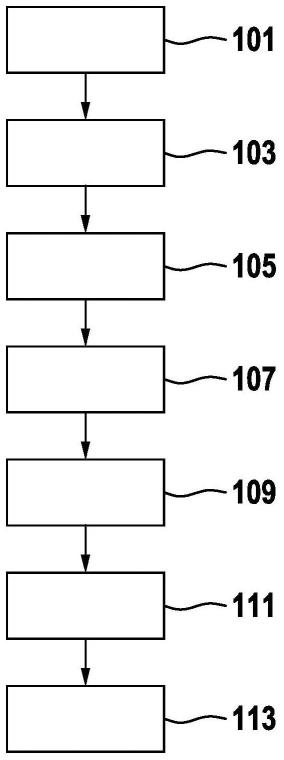
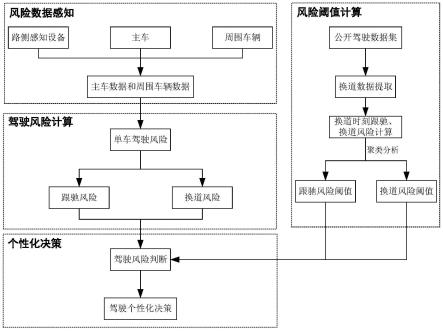
图1为本发明提供的基于多维风险评估的智能网联汽车个性化决策框架图;
[0048]
图2是为本发明周围车辆分布示意图;
[0049]
图3为本发明车辆个性化智能决策流程图。
具体实施方式
[0050]
下面结合附图并举实施例,对本发明进行详细描述。
[0051]
实施例1:
[0052]
本实施例提供了一种智能网联汽车风险评估方法,参见附图1,包括:根据智能网联环境下智能网联车辆装备的传感器及车路协同感知设施获取的用于驾驶风险评估的数据,数据包括主车数据和周围车辆数据,利用行车安全场模型分别计算各周围车辆对主车产生的驾驶风险;其中,主车数据包括主车的物理质量、横向坐标、纵向坐标、速度以及加速度;周围车辆数据包括各周围车辆的物理质量、横向坐标、纵向坐标、长度、宽度、速度和加速度。
[0053]
本实施例以行车安全场模型为基础,综合考虑主车的物理质量、横向坐标、纵向坐标、速度、加速度和周围车辆的物理质量、横向坐标、纵向坐标、长度、宽度、速度、加速度以及航向角等多个因素,从而准确计算周围各车辆对主车造成的驾驶风险。
[0054]
进一步的,参见附图2,周围车辆包括:前方周围车辆,左前方周围车辆、左后方周围车辆、右前方周围车辆和右后方周围车辆,周围车辆数量最大值为5个,最小值为0个;
[0055]
前方周围车辆fv,被定义为位于主车所在车道前方120m内,纵向距离最小的车辆;
[0056]
左前方周围车辆lfv,被定义为位于主车左侧相邻车道前方120m内,纵向距离最小的车辆;
[0057]
左后方周围车辆lrv,被定义为位于主车左侧相邻车道后方120m内,纵向距离最小的车辆;
[0058]
右前方周围车辆rfv,被定义为位于主车右侧相邻车道前方120m内,纵向距离最小的车辆;
[0059]
右后方周围车辆rrv,被定义为位于主车右侧相邻车道后方120m内,纵向距离最小的车辆。
[0060]
进一步的,利用行车安全场模型分别计算各周围车辆对主车产生的驾驶风险的方式为:
[0061]
步骤s11,根据某一周围车辆a的物理质量和速度,计算得到周围车辆a的风险质量,依据公式如下:
[0062][0063]
其中,m
sv
为周围车辆a的风险质量,m
sv
为周围车辆a的物理质量,v
sv
为周围车辆a的速度;
[0064]
步骤s12,一方面,周围车辆a的风险质量结合主车的横向坐标和纵向坐标以及周围车辆a的横向坐标、纵向坐标、长度和宽度计算得到周围车辆a的势能风险场强,计算公式如下:
[0065][0066]
其中,e
sv_sta
为周围车辆a的势能风险场强,a为大于0的场强系数,m
sv
为步骤s11中得到的周围车辆a的风险质量,x
ev
为主车纵向坐标,x
sv
为周围车辆a的纵向坐标,w
x
为周围车辆a长度的权重系数,l
sv
为周围车辆a的长度,y
ev
为主车纵向坐标,y
sv
为周围车辆a的横向坐
标,wy为周围车辆a宽度的权重系数,w
sv
为周围车辆a的宽度,d为主车与周围车辆a的距离矢量,d=(x
ev-x
sv
,y
ev-y
sv
);
[0067]
另一方面,周围车辆a的风险质量结合主车的横向坐标、纵向坐标以及周围车辆a的横向坐标、纵向坐标、长度、宽度和速度计算得到周围车辆a的动能风险场强,计算公式如下:
[0068][0069]
其中,e
sv_va
为周围车辆a的动能风险场强,α为与周围车辆a的速度相关的权重系数,v
sv
为周围车辆a的速度;θ为某周围车辆a的速度方向与d的夹角,顺时针方向为正;γ为与夹角θ相关的权重系数;β为与周围车辆a的加速度有关的权重系数,a
sv
为某周围车辆a的加速度;
[0070]
步骤s13,将步骤s12中得到的周围车辆a的势能风险场强和动能风险场强结合得到周围车辆a的风险场强,计算公式如下:
[0071]esv
=e
sv_sta
e
sv_va
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
公式(4)
[0072]
其中,e
sv
为某周围车辆a的风险场强,e
sv_sta
为步骤s12中得到的周围车辆a的势能风险场强,e
sv_va
为步骤s12中得到的周围车辆a的动能风险场强;
[0073]
步骤s14,根据步骤s13得到的周围车辆a的风险场强,结合主车的物理质量、速度和加速度以及周围车辆a的速度计算周围车辆a对主车产生的驾驶风险,计算公式如下:
[0074][0075]
其中,r
ev
为周围车辆a对主车产生的驾驶风险,e
sv
为步骤s13得到的周围车辆a的风险场强,m
ev
为主车的物理质量;wv为主车与周围车辆a的相对速度|v
ev-v
sv
|的权重系数;v
ev
为主车速度;v
sv
为某周围车辆速度;wa为主车加速度的权重系数;a
ev
为主车加速度。
[0076]
步骤s15,根据步骤s11-s14(即行车安全场模型)分别计算各周围车辆对主车产生的驾驶风险。
[0077]
进一步的,周围车辆数据还包括周围车辆的航向角,当周围车辆a的航向角不为0
°
时,需对周围车辆a坐标进行变换,坐标变换公式为:
[0078][0079]
其中,x'
sv
为变换后的周围车辆a的纵向坐标,y'
sv
为变换后的周围车辆a的横向坐标,为周围车辆a的航向角,逆时针为正。
[0080]
将变换后的周围车辆a的坐标x'
sv
、y'
sv
分别替换原周围车辆a的坐标x
sv
,y
sv
进行计算。
[0081]
实际行车环境中存在车辆航向角不为0
°
的情况,如变道切入场景中,其车身不与道路方向平行,此时,运动车辆的风险场需进行一定角度的偏转,从而更为准确地描述周围车辆对主车所产生的驾驶风险。
[0082]
实施例2:
[0083]
本技术又一实施例,一种智能网联汽车风险评估方法,参见附图1,还包括:根据各
周围车辆对主车产生的驾驶风险,分别加权计算主车所受跟驰风险和换道风险。
[0084]
本实施例通过对周围车辆单车造成的驾驶风险进行加权计算,获得主车受纵向跟驰风险和横向换道风险,综合考虑横、纵两个维度的驾驶风险,进一步保证了行车安全。
[0085]
进一步的,因为主车所受跟驰风险的数值大小主要受前方周围车辆、左前方周围车辆和右前方周围车辆的影响,所以根据前方周围车辆、左前方周围车辆和右前方周围车辆对主车产生的驾驶风险加权计算主车所受跟驰风险,具体计算方法为:
[0086]rcf
=w
lfrsv_lf
w
mfrsv_mf
w
rfrsv_rf
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
公式(7)
[0087]
其中,r
cf
为主车所受跟驰风险,w
lf
为左前方周围车辆对应的驾驶风险权重系数,r
sv_lf
为左前方周围车辆对主车产生的驾驶风险,w
mf
为前方周围车辆对应的驾驶风险权重系数,r
sv_mf
为前方周围车辆对主车产生的驾驶风险,w
rf
为右前方周围车辆对应的驾驶风险权重系数,r
sv_rf
为右前方周围车辆对主车产生的驾驶风险;
[0088]
进一步的,因为主车所受换道风险,其数值大小主要受主车相邻车道车辆影响,所以根据左前方周围车辆、左后方周围车辆、右前方周围车辆和右后方周围车辆对主车产生的驾驶风险加权计算主车所受换道风险,具体计算方法为:
[0089][0090]
其中,r
lc_l
为主车左侧车道面临的换道风险,w
lf
为左前方周围车辆对应的驾驶风险权重系数,r
sv_lf
为左前方周围车辆对主车产生的驾驶风险,w
lr
为左后方周围车辆对应的驾驶风险权重系数,r
sv_lr
为左后方周围车辆对主车形成的驾驶风险;r
lc_r
为右侧车道面临的换道风险,w
rf
为右前方周围车辆对应的驾驶风险权重系数,r
sv_rf
为右前方周围车辆对主车产生的驾驶风险,w
rr
为右后方周围车辆对应的驾驶风险权重系数,r
sv_rr
为右后方周围车辆对主车形成的驾驶风险。
[0091]
实施例3:
[0092]
本技术又一实施例,一种智能网联汽车个性化决策方法,基于实施例1以及2中的一种智能网联汽车风险评估方法,参见附图1,包括:选定驾驶风格,分别将主车所受驾驶风险与驾驶风格对应的驾驶风险阈值进行对比,从而确定主车的驾驶状态。
[0093]
本实施例在驾驶人或乘客选定驾驶风格后,将其对应阈值与主车面临的驾驶风险进行对比判断,实现考虑驾驶人或乘客舒适性的车辆个性化智能决策。
[0094]
进一步的,所述驾驶风险包括跟驰风险和换道风险,所受驾驶风险阈值包括跟驰风险阈值和换道风险阈值;
[0095]
参见附图3,将主车所受驾驶风险与驾驶风格对应的驾驶风险阈值进行对比,从而确定主车的驾驶状态的方式为:
[0096]
当主车面临的跟驰风险小于等于跟驰风险阈值,主车正常行驶;
[0097]
当主车面临的跟驰风险大于跟驰风险阈值时,将主车面临的左、右侧换道风险与驾驶风格对应的换道风险阈值分别进行对比,分为以下四种情况:
[0098]
若左侧换道风险和右侧换道风险均小于等于换道风险阈值,则主车进行左侧换道或者右侧换道;
[0099]
若左侧换道风险小于等于换道风险阈值且右侧换道风险大于换道风险阈值,则主
车进行左侧换道;
[0100]
若左侧换道风险大于换道风险阈值且右侧换道风险小于等于换道风险阈值,则主车进行右侧换道;
[0101]
若左侧换道风险和右侧换道风险均大于等于换道风险阈,则主车执行制动。
[0102]
进一步的,跟驰风险阈值和换道风险阈值的确定方式为:基于公开自然驾驶数据集,聚类分析驾驶人真实道路驾驶情况下的跟驰风险和换道风险,将其划分为三类,三个类簇的聚类中心分别相应的作为激进、正常、保守型驾驶风格的跟驰风险阈值和换道风险阈值;具体步骤如下:
[0103]
步骤s31:根据现有公开自然驾驶数据集,利用公式(1)-(7)计算得到驾驶人真实道路驾驶情况下的跟驰风险,即驾驶人执行换道初始时刻的跟驰风险;利用公式(1)-(6)和(8)计算得到驾驶人真实道路驾驶情况下的换道风险,即驶人执行换道初始时刻的换道风险
[0104]
步骤s32:将步骤s31中得到的驾驶人真实道路驾驶情况下的跟驰风险和换道风险输入聚类分析算法,类簇数设置为3,将得到的三个类簇中心,分别定义为激进、正常、保守型驾驶人或乘客的三种驾驶风格对应的跟驰风险阈值和换道风险阈值,具体参见表ⅰ:
[0105]
表1各驾驶风格对应的风险阈值
[0106] 保守型正常型激进型跟驰风险阈值r
cfrcf_crcf_mrcf_r
换道风险阈值r
lcrlc_crlc_mrlc_r
[0107]
实施例4:
[0108]
本技术一具体实施例,基于选定驾驶风格为保守型,利用本发明所述方法,对单向三车道场景下一种智能网联汽车风险评估方法及个性化决策方法进行介绍,具体步骤如下:
[0109]
步骤一:智能网联环境下,基于智能网联汽车自身装备的传感器及车路协同感知设施,获取主车的物理质量、横向坐标、纵向坐标、速度以及加速度;周围各车辆的物理质量、横向坐标、纵向坐标、长度、宽度、速度、加速度以及航向角;
[0110]
步骤二:根据公式(1)-(6)计算得到各周围车辆对主车产生的驾驶风险;
[0111]
步骤三:根据步骤二中的各周围车辆对主车产生的驾驶风险,一方面结合公式(7)加权平均计算得到主车所受跟驰风险r
cf
;另一方面结合公式(8)加权平均计算得到主车左、右侧车道面临的换道风险r
lc_l
和r
lc_r
;
[0112]
步骤四:保守型的跟驰风险阈值为r
cf_c
,换道风险阈值为r
lc_c
;
[0113]
将步骤三得到的跟驰风险r
cf
与保守型的跟驰风险阈值为r
cf_c
进行对比:
[0114]
当主车面临的跟驰风险小于等于跟驰风险阈值,即r
cf
≤r
cf_c
时,主车正常驾驶;
[0115]
当主车面临的跟驰风险大于跟驰风险阈值,即r
cf
》r
cf_c
时,将左、右侧车道面临的换道风险r
lc_l
和r
lc_r
分别与换道风险阈值为r
lc_c
进行对比判断,分为以下四种情况:
[0116]
若r
lc_l
≤r
lc_c
或r
lc_r
≤r
lc_c
,则主车向左侧或右侧进行换道;
[0117]
若r
lc_l
≤r
lc_c
且r
lc_l
》r
lc_c
,则主车向左侧进行换道;
[0118]
若r
lc_l
》r
lc_c
且r
lc_r
≤r
lc_c
,则主车向有单侧进行换道;
[0119]
若r
lc_l
》r
lc_c
且r
lc_l
》r
lc_c
,则主车执行制动。
[0120]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。