1.本技术属于清洁设备技术领域,尤其涉及一种清洁设备。
背景技术:
2.随着智能家用电器的发展,清洁设备(例如:扫地机器人)作为智能家用电器的一种,凭借一定的人工智能,能自动在房间内完成地板清理工作,越来越多的清洁设备等智能家用电器进入用户的家里。
3.清洁设备在自动清扫时,毛发等易缠绕物有几率跑到脚轮结构(例如:万向轮)里面,影响脚轮结构的移动,严重缠绕时会出现清洁设备无法正常工作的情况。部分清洁设备的脚轮结构不可拆卸,不方便进行清理。另一部分清洁设备的脚轮结构的可拆卸连接结构沿垂直于待清洁面(地面)的装设于清洁本体与万向轮之间,导致清洁本体和万向轮在垂直于待清洁面的方向上的配合长度增加,不利于清洁设备的空间布局。
技术实现要素:
4.对于现有技术存在的不足,本技术实施例提供了一种能够在节约装配空间并便于清理的清洁设备。
5.本技术实施例提供了一种清洁设备,所述清洁设备包括:
6.机器主体,用于清洁待清洁面;以及
7.脚轮结构,设于所述机器主体上;
8.所述脚轮结构包括支架、连接轴、轮体及弹性构件;所述支架连接于所述机器主体上,所述连接轴与所述支架转动连接;所述轮体与所述连接轴远离所述支架的一端固定连接;所述弹性构件包括第一部分与第二部分,所述第一部分与所述支架连接,所述第二部分沿所述连接轴的径向与所述连接轴可拆卸连接,以使所述弹性构件沿所述连接轴的径向给所述连接轴施加弹性作用力。
9.在一种可能的实施方式中,所述连接轴的外壁沿所述连接轴的周向设有环形的凹槽,所述弹性构件的第二部分与所述凹槽的侧壁相抵持。
10.在一种可能的实施方式中,所述脚轮结构还包括轴套,所述脚轮结构还包括轴套,所述轴套固定于所述支架上,所述轴套套设于所述连接轴外,所述轴套设有贯通所述轴套侧壁的凹孔,所述凹孔的位置与所述凹槽的位置对应设置,所述第二部分穿设于所述凹孔。
11.在一种可能的实施方式中,所述支架包括支架本体及设于所述支架本体上的底座,所述底座设有收容腔,所述轴套固定收容于所述收容腔内,所述连接轴转动地收容于所述收容腔内,所述底座设有与所述收容腔连通的缺口,所述缺口的位置对应所述凹孔的位置,所述第二部分通过所述缺口伸入所述凹孔。
12.在一种可能的实施方式中,沿所述连接轴的轴向,所述凹槽的高度大于所述第二部分的高度。
13.在一种可能的实施方式中,所述凹槽的内壁具有第一内壁,所述第一内壁设于所
述凹槽远离所述轮体的一侧,所述第一内壁与所述连接轴的轴向之间的夹角的取值范围为[10
°
,80
°
]。
[0014]
在一种可能的实施方式中,所述弹性构件对所述连接轴的弹性作用力的取值范围为[0.49n,4.90n]。
[0015]
在一种可能的实施方式中,所述弹性构件为扭簧。
[0016]
在一种可能的实施方式中,所述扭簧的线径的取值范围为[0.3mm,2mm],所述线径为制造所述扭簧的线材的直径。
[0017]
在一种可能的实施方式中,所述第一部分为压簧,所述第二部分为楔块。
[0018]
在一种可能的实施方式中,所述连接轴远离所述轮体的一端为楔面。
[0019]
本技术提供的清洁设备,通过将弹性构件的第一部分连接于支架上,弹性构件的第二部分沿连接轴的径向与连接轴抵持连接,使得弹性构件不占用连接轴的轴向方向上的空间,有利于减小脚轮结构在连接轴的轴向方向上的尺寸大小,有利于清洁设备的小型化发展以及空间布局。
[0020]
还有,弹性构件的第二部分与连接轴可拆卸连接,以实现连接轴与支架的可拆卸连接,以便于连接轴从支架中拆出。进而在减小脚轮结构及清洁设备沿连接轴的轴向方向上的尺寸大小的同时,亦有利于对清洁设备进行维护保养。
附图说明
[0021]
为了更清楚地说明本技术实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本技术实施方式提供的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0022]
图1是本技术一实施方式提供的一种清洁设备的立体组装图;
[0023]
图2是本技术一实施方式提供的一种清洁设备的爆炸示意图;
[0024]
图3是本技术一实施方式提供的一种脚轮结构的爆炸示意图;
[0025]
图4是本技术图3所示的脚轮结构的立体组装图;
[0026]
图5是图4所示的脚轮结构沿a-a方向的剖面图;
[0027]
图6是图5所示的连接轴与轮体的装配图;
[0028]
图7是本技术另一实施方式提供的脚轮结构的装配图;
[0029]
图8是图7所示的脚轮结构沿b-b方向的剖面图。
具体实施方式
[0030]
下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本技术一部分的实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
[0031]
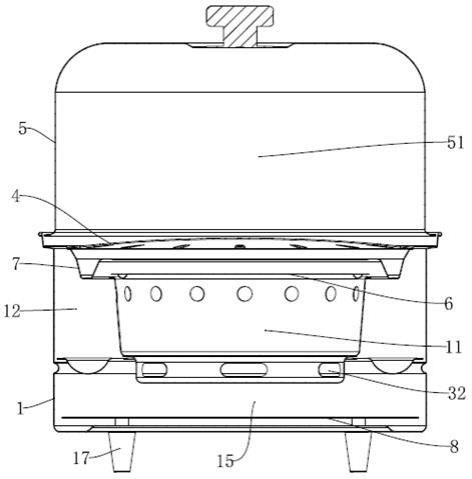
请参阅图1及图2,本技术一实施例提供一种清洁设备100,用于对待清洁面进行清洁。清洁设备100可以为扫地机器人、拖地机器人等自动清洁设备。
[0032]
清洁设备100可以包括机器主体10、滚刷组件20、壳体30、驱动轮模块40、边刷50、
集尘组件70、收容仓80、拖地组件90及脚轮结构110。
[0033]
机器主体10可以是由诸如金属、塑料、泡沫、弹性体、陶瓷、复合材料、其组合等中的一种或多种的材料组成的刚性或半刚性结构。
[0034]
机器主体10上可以设有感知系统、控制系统、驱动系统等,以使清洁设备100实现智能化。
[0035]
感知系统用于感测相关信号和物理量,以确定清洁设备100的位置信息和运动状态信息等。感知系统可包括摄像装置、激光测距装置(laserdirectstructuring,简称lds)以及各类传感装置等。其中,这些传感装置可根据产品需求而作不同的组合,例如:线激光模组,摄像装置和各类传感装置组合,激光测距装置和各类传感装置组合,摄像装置、激光测距装置以及各类传感装置组合。在这些实现方式中,摄像装置包括但不限于1个、2个、3个等。
[0036]
控制系统可以是可编程控制器,还可以是其他通用处理器、数字信号处理器(digital signal processing,简称dsp)、专用集成电路(application specific integrated circuit,简称asic)、现成可编程门阵列(field-programmable gate array,简称fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。例如单板或多板计算机,直接数字控制器(ddc),可编程逻辑控制器(plc)等。可以理解的,在其他示例中,控制器可以是任何计算设备,例如手持计算机,智能电话,平板电脑,膝上型计算机,台式计算机等其他计算设备。
[0037]
控制系统还可以包括存储器,存储器用于存储指令和数据。其中,数据包括但不限于:地图数据、控制清洁设备100操作时产生的临时数据。例如清洁设备100的位置数据、速度数据等。控制系统可以读取存储器中存储的指令执行相应的功能。存储器可以包括随机存取存储器(random access memory,简称ram)和非易失性存储器(non-volatile memory,简称nvm)。非易失性存储器可以包括硬盘驱动器(hard disk drive,简称hdd),固态硬盘(solid state drives,简称ssd),硅磁盘驱动器(silicon disk drive,简称sdd),只读存储器(read-only memory,简称rom),只读光盘(compact disc read-only memory,简称cd-rom),磁带,软盘,光数据存储设备等。
[0038]
滚刷组件20可以包括相对于机器主体10可旋转的一个或多个清洁滚布或清洁刷,以收集来自环境的灰尘和碎屑。滚刷组件20可以由与控制系统通信的一个或多个马达驱动。
[0039]
壳体30装设于机器主体10的外围,壳体30可以是刚性或半刚性构件。壳体30可以包括可拆卸连接的顶板301、侧板303及缓冲件305,顶板301盖设于机器主体10远离待清洁面的一侧,侧板303套设于机器主体10的外围,顶板301可以固定到侧板303和/或机器主体10上,以整体上保护清洁设备100内的部件。缓冲件305设于侧板303背离机器主体10的一侧,用于对机器主体10提供缓冲和保护作用。顶板301、侧板303及缓冲件305可以由诸如金属、塑料、泡沫、弹性体、陶瓷、复合材料及其组合等中的一种或多种的材料构成。
[0040]
驱动轮模块40设于机器主体10上,可以由机器主体10支撑。驱动轮模块40用于驱动清洁设备100以沿着待清洁表面移动,例如向前运动、向后运动及旋转的运动操作等。或者,驱动滚刷组件20相对于待清洁面转动,以使清洁设备100清洁待清洁面。驱动轮模块40包括左轮和右轮,驱动轮模块40可以被配置为由马达驱动以沿着待清洁表面推动清洁设备
100,其中马达与控制器通信以控制清洁设备100在环境中的运动,例如向前运动、向后运动的操作等。
[0041]
边刷50可以连接至机器主体10的靠近待清洁面的一侧,并且可以相对于机器主体10旋转,边刷50旋转以接合碎屑以使碎屑朝向和/或远离滚刷组件20边缘移动。
[0042]
集尘组件70可拆卸地安装在机器主体10上,集尘组件70用于收纳污物,集尘组件70可以包括集尘盒701以及集尘盒701与储液装置703组合的一体装置,或者,集尘组件70还可以包括集尘袋,集尘盒701与集尘袋组合的盒体等。储液装置703固定在机器主体10上。储液装置703用于存储清洁液。本实施例中的“清洁液”包括但不限于清水、清洁剂或者清水与清洁剂的组合。
[0043]
收容仓80设于机器主体10上,收容仓80可以以包括电池仓801和控制仓803,电池仓801用于容纳电池包等供电装置,控制仓803用于容纳控制系统的电子元器件,通过在机器主体10上设置收容仓80,以使清洁设备100的布局更加紧凑,有利于清洁设备100的小型化发展。
[0044]
拖地组件90安装于机器主体10靠近待清洁面的一侧,拖地组件90包括拖垫以及拖垫承载体。机器主体10可以呈圆形或d型,拖垫承载体和所承载的拖垫可整体呈弓形或类似弓形的形状,不仅可与机器主体10相适配,也可充分利用机器主体10后部的空间,获得较大的拖地面。若机器主体10为矩形,则拖垫承载体和所承载的拖垫可整体呈矩形或长条状。拖垫承载体用于作为拖垫的承载结构,拖垫通过拖垫承载体而安装于机器主体10上。在某些实施例中,拖垫承载体大致呈扁形的板状结构,其包括用于固定拖垫的固定面和与所述固定面相对的安装面,安装面固定于机器主体10靠近待清洁面的一侧。在一些实施例中,也可以没有拖地组件90。
[0045]
可以理解的,清洁设备100还可以包括其他单元或组件,或者,仅包括上述部分单元或组件,或缺少上述部分单元或者组件。例如,在其他实施例中,清洁设备100也可以不包括拖地组件90,本实施例对此不作限定,仅以上述清洁设备100为例进行说明。
[0046]
脚轮结构110为设置于机器主体10上的前轮的组件,脚轮结构110用于在待清洁面上平衡和引导清洁设备100。其中脚轮结构110可以为万向轮,脚轮结构110可以被配置为由马达驱动以控制清洁设备100的旋转运动,以使脚轮结构110承载机器主体10在待清洁面上移动。可以理解的,本技术提供的脚轮结构110还适用于行李箱、移动座椅等具有脚轮结构110的设备。
[0047]
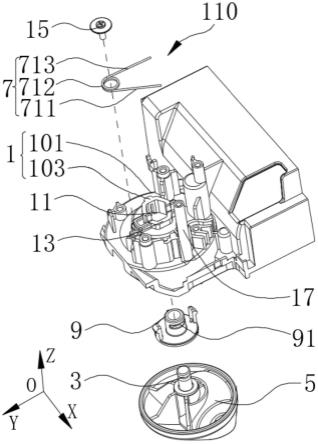
请结合参阅图1、图3与图4,脚轮结构110包括支架1、连接轴3、轮体5及弹性构件7。支架1与机器主体10连接,以使脚轮结构110与机器主体10靠近待清洁的一侧连接。连接轴3与支架1转动连接,轮体5与连接轴3连接,以使轮体5能够相对支架1转动。弹性构件7包括连接设置的第一部分711与第二部分713,第一部分711与支架1连接,第二部分713与连接轴3沿连接轴3的径向可拆卸连接,以使弹性构件7沿连接轴3的径向给连接轴3施加弹性作用力(预压力)。
[0048]
通过将弹性构件7的第一部分711与支架1连接,以使弹性构件7的安装不影响脚轮结构110在连接轴3的轴向方向上的配合尺寸,有利于减小脚轮结构110在连接轴3的轴向方向上的尺寸,进而便于清洁设备100的空间布局及小型化发展。通过弹性构件7的第二部分713与连接轴3之间形成可拆卸连接结构,当脚轮结构110中卷绕有毛发等杂质时,便于用户
将连接轴3、轮体5等零部件从清洁设备100上拆出,进而方便对脚轮结构110进行清理和维修。
[0049]
请参阅图3、图4及图5,设第一方向为垂直于连接轴3的轴向方向,第二方向为连接轴3的轴向方向,第一方向与第二方向垂直,第一方向对应图中x轴方向,第二方向对应图中z轴方向。
[0050]
支架1包括支架本体101及设于支架本体101上的底座103。弹性构件7的第一部分711连接在支架本体101上。底座103设有收容腔11,用于收容连接轴3。底座103设有与收容腔11连通的缺口13,用于通过弹性构件7,以方便弹性构件7与连接轴3之间的组装与拆卸。
[0051]
连接轴3的一端与轮体5固定连接,连接轴3的另一端转动地收容于收容腔11内,使得轮体5可相对支架1转动。连接轴3的外壁沿连接轴3的周向设有环形的凹槽31,用于与弹性构件7的第二部分713配合连接。沿连接轴3的轴向方向(z轴方向)上,凹槽31的开口高度d大于第二部分713的高度,以方便第二部分713的出入。
[0052]
本实施方式中,凹槽31的内壁包括第一内壁311与第二内壁313。第一内壁311设于凹槽31远离轮体5的一侧,用于与第二部分713接触。第一内壁311相对连接轴3的轴向倾斜设置,第一内壁311与连接轴3的轴向之间的夹角α的取值范围为[10
°
,80
°
],以提高第二部分713与第一内壁311抵持力度及接触稳定性,减少连接轴3从支架1中脱落的概率。在一些实施例中,α的取值可以为20
°
、30
°
、40
°
、50
°
、60
°
、70
°
中任意一个值。
[0053]
当夹角α较大时,增加第二部分713与凹槽31的配合难度,不利于第二部分713与凹槽31之间的抵持配合。当夹角α较小时,容易导致第二部分713从凹槽31中脱落,影响连接轴3与支架1的连接稳定性,降低脚轮结构110在工作过程中的可靠度。通过限制夹角α的大小,在便于第二部分713与凹槽31之间卡接配合的前提下,有利于提高第二部分713与连接轴3之间的配合稳定性,进而提高脚轮结构110工作的可靠度。
[0054]
可以理解,本技术不限定第一内壁311与连接轴3的轴向之间的夹角的取值范围。
[0055]
在其他的实施方式中,凹槽31在连接轴3的轴向方向上的剖面可以呈三角形状或者梯形形状,本技术对此不做限制。
[0056]
本实施方式中,连接轴3远离轮体5的一端的边缘为楔面(斜面),换而言之,连接轴3远离轮体5的一端(连接轴3与收容腔11配合时最先靠近支架1的一端)为倒角端或者圆角端。通过在连接轴3的顶端设置倒角或者圆角,方便连接轴3与支架1的组装。连接轴3可以与轮体5一体设置,连接轴3也可以与轮体5分体设置。
[0057]
第二部分713与连接轴3沿径向连接,使得弹性构件7沿连接轴3的径向向连接轴3施加弹性作用力(或预压力),即弹性构件7的弹性作用力方向与连接轴3的轴向方向大致呈90
°
,降低轮体5偏斜的可能性。
[0058]
弹性构件7对连接轴3的弹性作用力较小时,容易导致连接轴3从支架1的收容腔11中脱落。弹性构件7对连接轴3的弹性作用力过大时,用户将连接轴3从支架1的收容腔11中取出较困难。本实施方式中,弹性构件7施加给连接轴3的弹性作用力的取值范围为[50g,500g],在一些实施例中,弹性构件7施加给连接轴3的弹性作用力的取值可以为70g、90g、100g、120g、140g、180g、200g、250g、300g、350g、400g、450g中的任意一个。换句话说,弹性构件7施加给连接轴3的弹性作用力的取值范围为[0.49n,4.90n]。通过限制弹性构件7的弹性作用力的大小,在保证连接轴3不易从支架1的收容腔11中脱落的前提下,方便用户将连接
轴3从支架1的收容腔11中拆出,有利于减小脚轮结构110的拆卸难度,提高脚轮结构110的拆卸效率。
[0059]
本实施方式中,弹性构件7为扭簧,弹性构件7还包括第三部分712,第一部分711与第三部分712的一端连接,第二部分713与第三部分712的另一端连接。支架1还包括凸设于支架本体101上的固定件15与抵持件17。第三部分712固定于固定件15上,以对弹性构件7进行限位。第一部分711与抵持件17相抵持,进而将第一部分711固定于支架1上。
[0060]
抵持件17与固定件15之间的连线相对于凹槽31与固定件15之间的连线的角度小于弹性构件7在自然状态下第一部分711与第二部分713之间的角度,以使弹性构件7安装于支架1上时弹性构件7的第二部分713对连接轴3的凹槽31具有一定的弹性作用力。
[0061]
弹性构件7具有线径参数,弹性构件7的线径为制造弹性构件7的线材的直径。本实施方式中,弹性构件7的线径的取值范围为[0.3mm,2mm]。在一些实施例中,弹性构件7的线径的取值范围可以为0.4mm、0.5mm、0.6mm、0.7mm、0.8mm、0.9mm、1.0mm、1.1mm、1.2mm、1.3mm、1.4mm、1.5mm、1.6mm、1.7mm、1.8mm、1.9mm中的任意一值。当弹性构件7的线径过小时,弹性构件7不能对连接轴3的凹槽31提供足够的弹性力,容易导致连接轴3从支架1的收容腔11中脱落,当弹性构件7的线径过大时,用户拆卸扭簧较困难,容易提高用户将连接轴3从支架1的收容腔11中取出难度。通过限制扭簧的线径的尺寸大小,在保证连接轴3不易从支架1的收容腔11中脱落的前提下,方便用户将连接轴3从支架1的收容腔11中拆出,有利于减小脚轮结构110的拆卸难度,提高脚轮结构110的拆卸效率。
[0062]
需要理解的是,固定件15仅用于限制第三部分712在z轴方向上的移动,并不限制第三部分712绕z轴方向的转动,以实现扭簧的弹性功能,进而实现脚轮结构110的可拆卸功能。固定件15可以是介子螺丝等可从支架1上拆卸的结构,以便于扭簧受损时可以及时更换新的扭簧。抵持件17与第一部分711之间可以是可拆卸连接固定,也可以是抵持接触。
[0063]
脚轮结构110还包括轴套9,轴套9固定收容于收容腔11内,轴套9套设于连接轴3外。轴套9夹设于连接轴3与收容腔11的内侧壁之间。连接轴3相对支架1转动时,轴套9可用于减少连接轴3在垂直连接轴3的轴向的方向上的偏移,进而提高轮体5相对支架1转动稳定性。另外,轴套9还可以用于减少连接轴3与收容腔11的内壁之间的磨损。
[0064]
轴套9的至少部分周侧面与缺口13对应设置,轴套9的侧壁上贯通设有凹孔91。凹孔91的位置与凹槽31的位置对应设置。凹孔91的位置对应缺口13的位置,以穿设第二部分713。弹性构件7的第二部分713依次经支架1的缺口13、轴套9的凹孔91与连接轴3的凹槽31抵持。
[0065]
在其他的实施方式中,脚轮结构110的轴套9可以省略,连接轴3直接与支架1连接,本技术对此不做限制。
[0066]
在其他的实施方式中,弹性构件7的数量不仅限于一个,弹性构件7的数量可以是多个,包括但不限于2个、3个等,本技术对此不做限制。当弹性构件7的数量为多个时,多个弹性构件7皆设于与z轴方向垂直的平面上,且多个弹性构件7沿连接轴3的周向均匀排布。对应的支架1上的缺口13也为多个,轴套9上的凹孔91也为多个。连接轴3为转轴的情况下,凹槽31仍然为环形凹槽31。通过多个弹性构件7与连接轴3卡接连接,且多个弹性构件7沿连接轴3的周向均匀排布,有利于提高连接轴3与支架1的连接稳定性,进而提高脚轮结构110的工作可靠度。
[0067]
请参阅图7及图8,在本技术的又一实施方式中,弹性构件7包括连接设置的第一部分73与第二部分75,第一部分73与第二部分75沿x轴方向设置于支架1上。其中,第一部分73为压簧,第二部分75为楔块。第一部分73的远离第二部分75的一端与支架1上固定连接,第二部分75远离第一部分73的一端依次经支架1的缺口13、轴套9的凹孔91与连接轴3的凹槽31卡接连接。
[0068]
可以理解的是,第一部分73远离第二部分75的一端与固定件15固定连接,以使固定件15抵持于第一部分73远离第二部分75的一端,第二部分75远离第一部分73的一端与连接轴3的凹槽31卡接连接,以使连接轴3的凹槽31抵持于第二部分75远离第一部分73的一端。
[0069]
当弹性构件7(第二部分75和第一部分73)装配于支架1上时,由于弹性构件7的两端分别受到连接轴3与固定件15的抵持,以使第一部分73处于压缩状态,通过第一部分73的弹性力作用于连接轴3的凹槽31上,以使连接轴3与支架1固定连接。
[0070]
支架1的表面上还设有与缺口13连通设置的导向部19。导向部19为槽状结构。第一部分73与第二部分75均活动地收容于导向部19内,第一部分73远离第二部分75的一端固定于导向部19的侧壁上。导向部19用于对弹性构件7的运动进行导向及限位。
[0071]
在其他的实施方式中,弹性构件7可以包括多个连接的第一部分73与第二部分75组合,本技术对此不做限制。多个第一部分73与第二部分75组合皆设于垂直于z轴方向的平面上,且多个第一部分73与第二部分75组合沿连接轴3的周向均匀排布。通过设置多个连接的第一部分73与第二部分75组合,且多个第一部分73与第二部分75组合沿连接轴3的周向均匀排布,有利于提高连接轴3与支架1的连接稳定性,进而提高脚轮结构110的工作可靠度。
[0072]
以上是本技术的部分实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本技术的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。