1.本实用新型涉及医疗器械领域,特别涉及一种平衡急救担架车。
背景技术:
2.在突发性灾难的紧急救援或医疗紧急救援中,伤员的及时运送和护理是非常重要的,担架在这些紧急救援过程中起着举足轻重的作用。随着科技的进步和时代的发展,担架的类型从以前功能单一的担架发展到现在的走轮式担架、铲式担架等等,担架的种类越来越多,功能也越来越丰富。
3.目前,担架车是医院里最常用的一种运送病人的工具,大部分的医院从院外将病人接回院内的过程中,病人几乎都是躺在担架车上,并且难免会出现路面坎坷、崎岖不平的现象。由于担架车小,在上坡、下坡的过程中患者重心不稳,极易倾倒,饱受颠簸之苦,存在极大的安全隐患。
技术实现要素:
4.本实用新型的目的是提供一种平衡急救担架车,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
5.本实用新型解决其技术问题的解决方案是:提供一种平衡急救担架车,包括:车床、车床支架、调整机构、控制模块、水平倾角获取模块和电源模块,所述电源模块为蓄电池,所述电源模块用于为水平倾角获取模块、控制模块、调整机构提供电力支持;
6.所述水平倾角获取模块安装在所述车床的底部,所述水平倾角获取模块为基于adxl345的水平倾角获取模块,用于获取所述车床的水平倾角;
7.所述控制模块,用于根据水平倾角获取模块得到的水平倾角,根据所述水平倾角对调整机构进行控制,以调整车床的水平倾角,以使得车床的水平倾角始终为0。
8.进一步,所述调整机构包括四条伸缩杆,分别为第一伸缩杆、第二伸缩杆、第三伸缩杆、第四伸缩杆,每条伸缩杆的结构相同,所述伸缩杆包括细杆和粗杆,所述细杆和粗杆滑动连接,所述粗杆内安装有步进电机,所述步进电机用于带动所述细杆做垂直方向上的往复运动,所述步进电机与所述控制模块之间连接有四个继电器,四个继电器分别为第一继电器、第二继电器、第三继电器、第四继电器;
9.所述第一继电器的一端分别与所述控制模块、电源模块的负极连接,其另一端与所述步进电机的第一驱动端连接;
10.所述第二继电器的一端分别与所述控制模块、所述电源模块的正极连接,其另一端与所述步进电机的第一驱动端连接;
11.所述第三继电器的一端分别与所述控制模块、所述电源模块的负极连接,其另一端与所述步进电机的第二驱动端连接;
12.所述第四继电器的一端分别与所述控制模块、所述电源模块的正极连接,其另一端与所述步进电机的第二驱动端连接;
13.所述控制模块设有八个io口,所述八个io口分别为第一io口、第二io口、第三io口、第四io口、第五io口、第六io口、第七 io口、第八io口,所述第一io口至第四io口分别与第一伸缩杆、第二伸缩杆对应的第一继电器、第二继电器、第三继电器、第四继电器连接,第五io口至第八io口分别与和第三伸缩杆、第四伸缩杆对应的第一继电器、第二继电器、第三继电器、第四继电器连接;
14.所述控制模块将八个io口均配置为输出模式以对所述继电器的闭合和断开进行控制,当水平倾角大于0时,所述控制模块控制第一伸缩杆、第二伸缩杆伸长和第三伸缩杆、第四伸缩杆缩短,直至水平倾角等于0;当水平倾角小于0时,所述控制模块控制第一伸缩杆、第二伸缩杆缩短和第三伸缩杆、第四伸缩杆伸长,直至水平倾角等于 0。
15.进一步,所述细杆和所述粗杆位于同一中心轴,所述粗杆的直径大于所述细杆的直径,所述细杆位于所述伸缩杆接近车床支架的一端,所述细杆的一端与所述车床支架固定连接。
16.进一步,所述粗杆远离所述车床支架的一端安装有万向脚轮,所述粗杆接近车床支架的一端设有开口,所述开口的直径与所述细杆的直径一致,所述细杆通过所述开口套接在所述粗杆上,所述细杆套接于所述粗杆的一端表面设有螺纹并与所述步进电机连接。
17.进一步,所述第一伸缩杆、第三伸缩杆安装在所述车床支架的一侧,所述第二伸缩杆、第三伸缩杆安装在所述车床支架的另一侧,所述车床支架的两侧均安装有扶手。
18.进一步,所述控制模块为基于stc89c52rc单片机的控制系统。
19.进一步,所述车床支架的侧边设有按键组,所述按键组包括手动模式选择键、自动模式选择键、倾角减小键、倾角增大键和电源键,所述按键组和所述控制模块连接,所述控制模块用于检测所述按键组被按下的情况,并根据所述按键组被按下的情况控制调整机构的工作;
20.所述电源键用于开启和关闭所述担架车;
21.所述手动模式选择键和所述自动模式选择键用于控制所述担架车置于所选的工作模式,当所述担架车置于手动模式时,所述倾角减小键和所述倾角增大键工作;当所述担架车置于自动模式时,所述倾角减小键和所述倾角增大键不工作;
22.所述倾角减小键用于当所述担架车置于手动模式的工作状态下,控制所述车床的水平倾角减小;
23.所述倾角增大键用于当所述担架车置于手动模式的工作状态下,控制所述车床的水平倾角增大。
24.进一步,还包括:显示模块,所述车床支架的侧边还安装有显示屏,所述显示模块分别与所述控制模块、所述显示屏连接,所述显示模块用于控制所述显示屏的显示,所述显示屏用于实时显示所述车床的水平倾角的参数。
25.本实用新型的有益效果是:提供一种平衡急救担架车,包括车床、车床支架、调整机构、控制模块、水平倾角获取模块和电源模块,所述电源模块为蓄电池,所述电源模块用于为水平倾角获取模块、控制模块、调整机构提供电力支持;所述水平倾角获取模块安装在所述车床的底部,所述水平倾角获取模块为基于adxl345的水平倾角获取模块,用于获取所述车床的水平倾角;所述控制模块,用于根据水平倾角获取模块得到的水平倾角,根据所述水平倾角对调整机构进行控制,以调整车床的水平倾角,以使得车床的水平倾角始终为0。
26.本实用新型通过将控制模块的八个io口配置为输出模式以对调整机构的每条伸缩杆对应的继电器进行控制,继电器的通断决定电机的转向改变以控制伸缩杆伸长或缩短,以使得车床的水平倾角始终为 0,达到了平衡急救担架车在上坡、下坡的过程中保持平衡的目的,有效地消除了在上坡、下坡的过程中患者重心不稳、担架车极易倾倒的安全隐患。
附图说明
27.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单说明。显然,所描述的附图只是本实用新型的一部分实施例,而不是全部实施例,本领域的技术人员在不付出创造性劳动的前提下,还可以根据这些附图获得其他设计方案和附图。
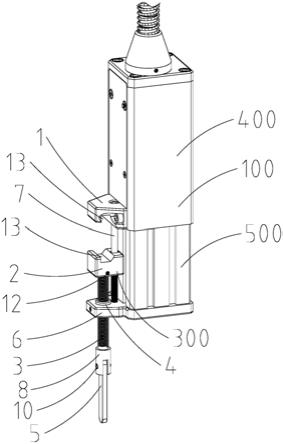
28.图1是一种平衡急救担架车的结构示意图;
29.图2是一种平衡急救担架车的单条伸缩杆的剖视图;
30.图3是一种平衡急救担架车的单条伸缩杆的步进电机及其对应的继电器、电源模块、控制模块的电路图;
31.图4是一种平衡急救担架车的四条伸缩杆的步进电机、继电器、控制模块的电路图;
32.图5a是一种平衡急救担架车处于上坡时的平衡前和平衡后的状态图;
33.图5b是一种平衡急救担架车处于下坡时的平衡前和平衡后的状态图;
34.图6是一种平衡急救担架车处于手动模式的工作状态下的工作流程图;
35.图7是一种平衡急救担架车处于自动模式的工作状态下的工作流程图。
具体实施方式
36.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
37.需要说明的是,虽然在系统示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于系统中的模块划分,或流程图中的顺序执行所示出或描述的步骤。说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
38.本技术提供的一种平衡急救担架车,请参照图1至图7对本技术实施例进行说明与介绍,一种平衡急救担架车,包括:车床100、车床支架200、控制模块u1、水平倾角获取模块、电源模块1000和调整机构,车床100设置在车床支架200上,所述水平倾角获取模块设置在车床支架200的底部,所述控制模块u1分别与水平倾角获取模块、电源模块1000连接,电源模块1000为蓄电池,电源模块1000 为水平倾角获取模块、控制模块u1、调整机构的工作提供电力支持;
39.所述水平倾角获取模块安装在所述车床100的底部,用于获取所述车床100的水平倾角θ;
40.所述控制模块u1,用于根据水平倾角获取模块得到的水平倾角θ,根据所述水平倾
角θ对调整机构进行控制,以调整车床100的水平倾角θ,以使得车床100的水平倾角θ始终为0。
41.在这个实施例中,水平倾角θ为车床100与水平方向构成的夹角,即车床100与x轴构成的夹角,车床100与x轴的正方向构成的倾角θ大于0,车床100与x轴的负方向构成的倾角θ小于0。
42.作为优选的实施例,所述控制模块u1为基于stc89c52rc单片机的控制系统。
43.作为优选的实施例,所述控制模块u1和所述水平倾角获取模块实现通信的方式为i2c原理。
44.作为优选的实施例,所述水平倾角获取模块为基于adxl345的水平倾角获取模块,所述adxl345为加速度传感器。在这个实施例中,所述adxl345利用重力加速度与其在x、y、z三轴的分量关系,计算得出三轴与重力加速度的夹角,进而得出水平倾角。设重力加速度在 x轴的分量为a
x
、重力加速度在y轴的分量为ay、重力加速度在z轴的分量为az,通过下述公式可计算得出水平倾角θ的值:
[0045][0046]
特别地,所述水平倾角获取模块基于有关adxl345的现有技术实现,所述现有技术为
[0047]
https://wenku.baidu.com/view/c5233cd628ea81c758f578af.html? fr=income2-doc-search所述的内容。
[0048]
进一步作为优选的实施方式,所述调整机构包括四条伸缩杆,分别为第一伸缩杆300、第二伸缩杆400、第三伸缩杆500和第四伸缩杆600。第一伸缩杆300的一端、第三伸缩杆500的一端分别与车床支架200的一侧连接,第二伸缩杆400的一端、第四伸缩杆600的一端分别与车床支架200的另一侧连接,所述车床支架200的两侧均安装有扶手210;第一伸缩杆300、第二伸缩杆400、第三伸缩杆500 和第四伸缩杆600远离车床支架200的一端均安装有万向脚轮700,所述万向脚轮700用于使所述担架车实现全方位运动。
[0049]
请参考图2,所述第一伸缩杆300、第二伸缩杆400、第三伸缩杆500和第四伸缩杆600的结构一致,以第一伸缩杆300为例进行说明。所述伸缩杆均包括细杆310和粗杆320,粗杆320内安装有步进电机900,细杆310和粗杆320滑动连接,所述细杆310和粗杆320 位于同一中心轴,粗杆320的直径大于细杆310的直径,细杆310位于伸缩杆接近车床支架200的一端,细杆310的一端与车床支架200 固定。
[0050]
粗杆320远离车床支架200的一端与万向脚轮700连接,粗杆 320接近车床支架200的一端设有开口,开口的直径与细杆310的直径一致,细杆310通过开口套接在粗杆320上,细杆310套接于粗杆320的一端的表面设有螺纹,并与步进电机900连接;步进电机900 用于带动细杆310在垂直方向上做上下反复运动。
[0051]
请参考图3,所述步进电机900与所述控制模块u2之间连接有四个继电器,分别为第一继电器k1、第二继电器k2、第三继电器k3、第四继电器k4,所述第一继电器k1的一端分别与所述控制模块u1、所述电源模块1000的负极,其另一端与所述步进电机900的第一驱动端连接;
[0052]
所述第二继电器k2的一端分别与所述控制模块u1、所述电源模块1000的正极,其
另一端与所述步进电机900的第一驱动端连接;
[0053]
所述第三继电器k3的一端分别与所述控制模块u1、所述电源模块1000的负极,其另一端与所述步进电机900的第二驱动端连接;
[0054]
所述第四继电器k4的一端分别与所述控制模块u1、所述电源模块1000的正极,其另一端与所述步进电机900的第二驱动端连接。
[0055]
在这个实施例中,所述控制模块u1根据水平倾角θ控制四个继电器的断开和闭合,步进电机900的正转条件为其第一驱动端为高电平、其第二驱动端为低电平;步进电机900反转的条件为其第一驱动端为低电平、其第二驱动端为高电平。当所述控制模块u1输出高电平至第一继电器k1、第四继电器k4,并输出低电平至第二继电器k2、第三继电器k3时,第一继电器k1、第四继电器k4闭合,第二继电器k2、第三继电器k3断开,其步进电机900的第一驱动端为低电平,第二驱动端为高电平,此时步进电机900反转,步进电机900所对应的伸缩杆缩短。
[0056]
当所述控制模块u1输出高电平至第二继电器k2、第三继电器k3,并输出低电平至第一继电器k1、第四继电器k4时,第二继电器k2、第三继电器k3闭合,第一继电器k1、第四继电器k4断开,其步进电机900的第一驱动端为高电平,第二驱动端为低电平,此时步进电机900正转,步进电机900所对应的伸缩杆伸长。
[0057]
当所述控制模块u1输出低电平至第一继电器k1、第二继电器k2、第三继电器k3、第四继电器k4时,四个继电器均断开时,其步进电机900的转动状态不变,步进电机900所对应的伸缩杆的状态也不变。
[0058]
请参考图4,所述控制模块u1设有八个io口,分别为第一io 口p1.0、第二io口p1.1、第三io口p1.2、第四io口p1.3、第五 io口p1.4、第六io口p1.5、第七io口p1.6和第八io口p1.7,第一io口p1.0至第四io口p1.3分别与第一伸缩杆300、第二伸缩杆 400相对应的第一继电器k1、第二继电器k2、第三继电器k3、第四继电器k4连接,第五io口p1.4至第八io口p1.7分别与第三伸缩杆500、第四伸缩杆600相对应的第一继电器k1、第二继电器k2、第三继电器k3、第四继电器k4连接。所述控制模块u1通过将第一 io口p1.0至第八io口p1.7配置为输出模式以对每个伸缩杆对应的四个继电器进行控制,当水平倾角θ大于0时,所述控制模块u1控制第一伸缩杆300、第二伸缩杆400伸长,并控制第三伸缩杆500、第四伸缩杆600缩短,直至水平倾角θ等于0;当水平倾角θ小于0 时,所述控制模块u1控制第一伸缩杆300、第二伸缩杆400缩短,并控制第三伸缩杆500、第四伸缩杆600伸长,直至水平倾角θ等于0。
[0059]
进一步作为优选的实施方式,所述车床支架200上还设有按键组 800,所述按键组800包括手动模式选择键、自动模式选择键、倾角减小键、倾角增大键和电源键,按键组800和控制模块u1连接,控制模块u1用于检测按键组800被按下的情况,并根据按键组800被按下的情况控制调整机构的工作;
[0060]
所述电源键用于开启和关闭所述担架车;
[0061]
所述手动模式选择键和所述自动模式选择键用于控制所述担架车置于所选的工作模式,当所述担架车置于手动模式时,所述倾角减小键和所述倾角增大键工作;当所述担架车置于自动模式时,所述倾角减小键和所述倾角增大键不工作;
[0062]
所述倾角减小键用于当所述担架车置于手动模式的工作状态下,控制所述车床100的水平倾角θ减小;
[0063]
所述倾角增大键用于当所述担架车置于手动模式的工作状态下,控制所述车床100的水平倾角θ增大。
[0064]
进一步作为优选的实施方式,所述平衡急救担架车还设有显示模块,所述车床支架200的侧面还安装有显示屏,显示模块分别与控制模块u1、显示屏连接,显示模块用于控制显示屏的显示,显示屏用于实时显示所述车床100的水平倾角θ。
[0065]
本技术提供的一种平衡急救担架车处于上坡、下坡时保持担架车的平衡的原理如下:
[0066]
图5a为是一种平衡急救担架车处于上坡时的平衡前和平衡后的状态图,下表为平衡急救担架车处于上坡时平衡前后的状态表,其中“1”表示闭合,“0”表示断开,请参考图5a和下表。
[0067][0068]
当所述平衡急救担架车处于上坡时,按下手动模式选择键,所述担架车置于手动模式的工作状态下。水平倾角获取模块获取车床100 的水平倾角θ并反馈至控制模块u1,显示屏实时显示所述车床100 的水平倾角θ,此时水平倾角θ大于0。医护人员根据倾角θ按下倾角减小键,控制模块检测到倾角减小键被按下,第一io口p1.0和第四io口p1.3输出低电平使第一伸缩杆300、第二伸缩杆400对应的第一继电器k1、第四继电器k4断开,第二io口p1.1和第三io口 p1.2输出高电平使第一伸缩杆300、第二伸缩杆400对应的第二继电器k2、第三继电器k3闭合;第五io口p1.4和第八io口p1.7输出高电平使第三伸缩杆500、第四伸缩杆600对应的第一继电器k1、第四继电器k4闭合,第六io口p1.5和第七io口p1.6输出低电平使第三伸缩杆500、第四伸缩杆600对应的第二继电器k2、第三继电器 k3断开,此时第一伸缩杆300、第二伸缩杆400的步进电机900正转,第一伸缩杆300、第二伸缩杆400伸长;第三伸缩杆500、第四伸缩杆600的步进电机900反转,第三伸缩杆500、第四伸缩杆600缩短,直至水平倾角θ降低为0,所述八个io口均输出低电平,使步进电机900保持现状不变。
[0069]
当按下自动模式选择键时,所述担架车置于自动模式的工作状态下。水平倾角获取模块获取车床100的水平倾角θ并反馈至控制模块,显示屏实时显示车床100的水平倾角θ,控制模块u1判断所述水平倾角θ是否大于0。
[0070]
由于此时担架车处于上坡情境下,水平倾角θ必大于0,第一io 口p1.0和第四io口p1.3输出低电平使第一伸缩杆300、第二伸缩杆400对应的第一继电器k1、第四继电器k4断开,第二io口p1.1 和第三io口p1.2输出高电平使第一伸缩杆300、第二伸缩杆400对应的第二继电器k2、第三继电器k3闭合;第五io口p1.4和第八io 口p1.7输出高电平使第三伸缩杆500、第四伸缩杆600对应的第一继电器k1、第四继电器k4闭合,第六io口p1.5和第七io口
p1.6 输出低电平使第三伸缩杆500、第四伸缩杆600对应的第二继电器k2、第三继电器k3断开,此时第一伸缩杆300、第二伸缩杆400的步进电机900正转,第一伸缩杆300、第二伸缩杆400伸长;第三伸缩杆 500、第四伸缩杆600的步进电机900反转,第三伸缩杆500、第四伸缩杆600缩短,直至水平倾角θ降低为0,所述八个io口均输出低电平,使步进电机900保持现状不变。
[0071]
图5b是一种平衡急救担架车处于下坡时的平衡前和平衡后的状态图,下表为平衡急救担架车处于下坡时平衡前后的状态表,其中“1”表示闭合,“0”表示断开,请参考图5b和下表。
[0072][0073]
当所述平衡急救担架车处于下坡时,按下手动模式选择键,所述担架车置于手动模式的工作状态下。水平倾角获取模块获取车床100 的水平倾角θ并反馈至控制模块,显示屏实时显示所述车床100的水平倾角θ,此时水平倾角θ小于0。医护人员根据水平倾角θ按下倾角增大键,控制模块u1检测到倾角增大键被按下,第一io口p1.0、第四io口p1.3输出高电平,第一伸缩杆300、第二伸缩杆400对应的第一继电器k1、第四继电器k4闭合,第二io口p1.1、第三io口 p1.2输出低电平,第一伸缩杆300、第二伸缩杆400对应的第二继电器k2、第三继电器k3断开;第五io口p1.4、第八io口p1.7输出低电平,第三伸缩杆500、第四伸缩杆600对应的第一继电器k1、第四继电器k4断开,第六io口p1.5和第七io口p1.6输出高电平,第三伸缩杆500、第六伸缩杆600对应的第二继电器k2、第三继电器 k3闭合,此时第一伸缩杆300、第二伸缩杆400的步进电机900反转,第一伸缩杆300、第二伸缩杆400缩短;第三伸缩杆500、第四伸缩杆600的步进电机900正转,第三伸缩杆500、第四伸缩杆600伸长,直至水平倾角θ增大为0,所述八个io口均输出低电平,使步进电机900保持现状不变。
[0074]
当按下自动模式选择键时,所述担架车置于自动模式的工作状态下。水平倾角获取模块获取车床100的水平倾角θ并反馈至控制模块 u1,显示屏实时显示车床100的水平倾角θ,控制模块u1判断所述水平倾角θ是否大于0。由于此时担架车处于下坡情境下,倾角θ必定小于0,第一io口p1.0、第四io口p1.3输出高电平,第一伸缩杆300、第二伸缩杆400对应的第一继电器k1、第四继电器k4闭合,第二io口p1.1、第三io口p1.2输出低电平,第一伸缩杆300、第二伸缩杆400对应的第二继电器k2、第三继电器k3断开;第五io 口p1.4、第八io口p1.7输出低电平,第三伸缩杆500、第四伸缩杆 600对应的第一继电器k1、第四继电器k4断开,第六io口p1.5和第七io口p1.6输出高电平,第三伸缩杆500、第四伸缩杆600对应的第二继电器k2、第三继电器k3闭合,此时第一伸缩杆300、第二伸缩杆400的步进电机900反转,第一伸缩杆300、第二伸缩杆400 缩短;第三伸缩杆500、第四伸缩杆600的步进电机900正转,
第三伸缩杆500、第四伸缩杆600伸长,直至水平倾角θ增大为0,所述八个io口均输出低电平,使步进电机900保持现状不变。
[0075]
特别地,当第一继电器k1、第二继电器k2、第三继电器k3、第四继电器k4均断开时,步进电机900的状态不变。
[0076]
基于上述实施例,图6为一种平衡急救担架车处于手动模式的工作状态下的工作流程图,请参考图6,所述处于手动模式的工作状态下的工作流程包括:
[0077]
s100、按下电源键以开启平衡急救担架车,水平倾角获取模块获取车床的水平倾角并反馈至控制模块,显示屏实时显示所述水平倾角;按下手动模式选择键使平衡急救担架车置于手动模式的工作状态下;
[0078]
s110、控制模块检测倾角减小键或倾角增大键是否被按下;
[0079]
如果是,则执行步骤s111;
[0080]
s111、当控制模块检测到倾角减小键被按下时,控制模块控制第一伸缩杆、第二伸缩杆伸长,并控制第三伸缩杆、第四伸缩杆缩短;当控制模块检测到倾角增大键被按下时,控制模块控制第一伸缩杆、第二伸缩杆缩短,并控制第三伸缩杆、第四伸缩杆伸长。
[0081]
如果否,则执行步骤s112;
[0082]
s112、第一伸缩杆、第二伸缩杆、第三伸缩杆、第四伸缩杆的步进电机的工作状态均不变。
[0083]
基于上述实施例,图7为一种平衡急救担架车处于自动模式的工作状态下的工作流程图,请参考图7,所述处于自动模式的工作状态下的工作流程包括:
[0084]
s200、按下电源键以开启平衡急救担架车,水平倾角获取模块获取车床的水平倾角并反馈至控制模块,显示屏实时显示所述水平倾角;按下自动模式选择键使平衡急救担架车置于自动模式的工作状态下;
[0085]
s210、控制模块判断所述水平倾角是否大于0;
[0086]
如果是,则执行步骤s220;
[0087]
s220、控制模块控制控制第一伸缩杆、第二伸缩杆伸长,并控制第三伸缩杆、第四伸缩杆缩短。
[0088]
基于上述实施例,在步骤s210中,控制模块判断所述水平倾角是否大于0,该方法还可以通过以下步骤实现:
[0089]
如果控制模块判断所述水平倾角未大于0,则执行以下步骤:
[0090]
s230、控制模块判断所述水平倾角是否小于0;
[0091]
如果是,则执行步骤s231;
[0092]
s231、控制模块控制第一伸缩杆、第二伸缩杆缩短,并控制第三伸缩杆、第四伸缩杆伸长。
[0093]
如果否,则执行步骤s232;
[0094]
s232、第一伸缩杆、第二伸缩杆、第三伸缩杆、第四伸缩杆的步进电机的工作状态均不变。
[0095]
以上对本实用新型的较佳实施方式进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本实用新型精神的前提下还可做出种种的等同变型或替换,这些等同的变型或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。