1.本实用新型涉及冲击力检测技术领域,更具体地说,涉及一种冲击力检测设备。
背景技术:
2.现有技术中的冲击力检测设备,通常只具有撞击功能,也即,通过对产品进行撞击,实现冲击力检测。在进行冲击力检测前,需要人工进行产品信息识别、数据统计与分类等。
3.可见,现有的冲击力检测设备的功能单一,需要人工辅助识别产品信息,给产品冲击力检测带来诸多不便。
4.因此,如何优化冲击力检测设备的结构,使其具有产品信息自动识别的功能,是目前本领域技术人员亟待解决的问题。
技术实现要素:
5.有鉴于此,本实用新型的目的是提供一种冲击力检测设备,其具有产品信息自动识别的功能。
6.为了实现上述目的,本实用新型提供如下技术方案:
7.一种冲击力检测设备,包括:基座;扫码装置,所述扫码装置包括扫码器,所述扫码器的高度和角度均可调地设于所述基座,用于识别工件的识别码;撞击装置,所述撞击装置包括:支架,设有滑槽和可沿第一方向滑动的冲击头,所述滑槽内设有可沿所述第一方向滑动的砝码,且所述砝码位于所述冲击头上方;砝码提升释放机构,设于所述支架,用于驱动所述砝码沿所述第一方向远离所述冲击头运动至预设高度,并释放所述砝码,使所述砝码朝向所述冲击头运动以撞击所述冲击头,以使所述冲击头冲击所述工件;送料装置,设于所述基座,用于带动工件在所述扫码装置和所述撞击装置之间转移。
8.可选地,所述扫码装置还包括:第一升降驱动机构,设于所述基座;第一固定轴,滑动连接所述第一升降驱动机构,所述扫码器可转动地设于所述第一固定轴,所述第一升降驱动机构用于通过所述第一固定轴带动所述扫码器沿第一方向运动。
9.可选地,所述第一固定轴设有第一安装组件,所述第一安装组件包括:第一安装件,转动设于所述第一固定轴,且沿第一转动方向转动,所述第一转动方向为绕所述第一固定轴的轴线转动的方向;第二安装件,转动连接所述第一安装件,且沿第二转动方向转动,所述第二转动方向为绕垂直于所述第一固定轴的轴线转动的方向;其中,所述扫码器包括第一扫码器,所述第一扫码器与所述第二安装件相连。
10.可选地,所述第一固定轴还设有第二安装组件,所述第二安装组件包括:第三安装件,转动设于所述第一固定轴,且沿第一转动方向转动,所述第一转动方向为绕所述第一固定轴的轴线转动的方向;第四安装件,转动连接所述第三安装件,且沿第二转动方向转动,所述第二转动方向为绕垂直于所述第一固定轴的轴线转动的方向;第五安装件,转动连接所述第四安装件,沿第三转动方向的位置可调,所述第三转动方向为绕平行于所述第一固
定轴的轴线转动的方向;其中,所述扫码器还包括第二扫码器,所述第二扫码器与所述第五安装件相连。
11.可选地,所述扫码器的数量为至少两个,设于所述基座的不同位置,用于识别工件不同侧面的识别码。
12.可选地,还包括:拍照台,设于所述基座,用于放置冲击后的工件;图像采集器,设于所述拍照台的上方,用于对冲击后的工件进行拍照。
13.可选地,所述第一升降驱动机构还连接有第二固定轴,所述图像采集器设于所述第二固定轴,所述第一升降驱动机构还用于通过所述第二固定轴带动所述图像采集器沿所述第一方向朝向或远离所述拍照台运动。
14.可选地,所述砝码提升释放机构包括:伸缩机构,所述伸缩机构设有叉托件,用于驱动所述叉托件沿垂直于所述第一方向的第二方向朝向所述砝码运动,以抵接所述砝码;第二升降驱动机构,所述第二升降驱动机构连接所述伸缩机构,用于驱动所述伸缩机构上的叉托件带动所述砝码沿所述第一方向远离所述冲击头运动。
15.可选地,所述撞击装置还包括:第三升降驱动机构,所述第三升降驱动机构连接所述支架,用于驱动所述支架沿所述第一方向往复运动。
16.本实用新型提供的冲击力检测设备,工作时,将工件放置于送料装置,通过送料装置将工件移送到扫码装置的扫码位,然后,利用扫码装置对工件的识别码进行扫码识别,扫码装置完成扫码后,再通过送料装置将工件移送到撞击装置的撞击位,利用撞击装置对工件进行冲击检测。
17.可以看出,该冲击力检测设备在对工件进行冲击检测前,能够利用扫码装置对工件进行自动扫码识别,代替人工对工件信息进行识别,这有利于对产品信息进行自动数据统计与分类等,扩展了冲击力检测设备的功能,而且,利用送料装置实现工件在扫码装置和撞击装置之间的转移,给工件冲击力检测带来诸多便利,提高了整体检测效率,减轻了人工劳动强度。
附图说明
18.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其它的附图。
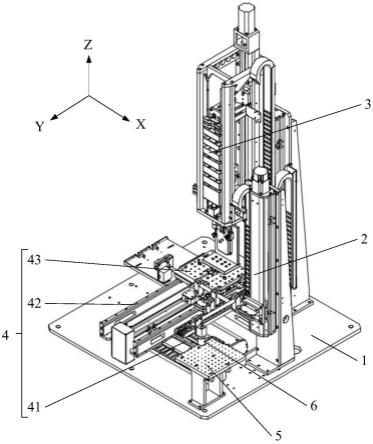
19.图1为本实用新型具体实施例所提供的冲击力检测设备的结构示意图;
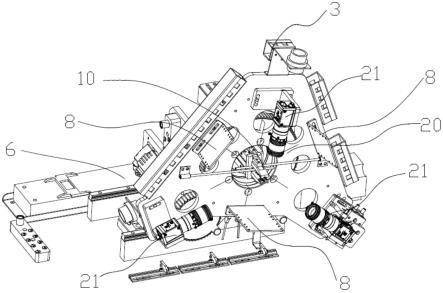
20.图2为图1中扫码装置的结构示意图;
21.图3为第一安装组件和第一固定轴的结构示意图;
22.图4为图1中撞击装置的结构示意图;
23.图5为图4中砝码提升释放机构的结构示意图。
24.图1至图5中的附图标记如下:
25.1为基座、2为扫码装置、21为扫码器、211为第一扫码器、212为第二扫码器、22为第一升降驱动机构、23为第一固定轴、24为第一安装组件、241为第一安装件、2411为第一卡槽、2412为第一连接槽、2413为第一连接板、2414为第二连接板、2415为第二连接槽、2416为
第三连接板、2417为第四连接板、242为第二安装件、2421为第三卡槽、2422为第三连接槽、2423为第五连接板、2424为第六连接板、243为连接轴、244为第一连接螺栓、245为第二连接螺栓、246为第三连接螺栓、25为第二安装组件、251为第三安装件、252为第四安装件、253为第五安装件、26为第二固定轴、27为固定块、28为第六安装件、29为第七安装件、3为撞击装置、31为支架、32为冲击头、33为滑槽、34为砝码、35为砝码提升释放机构、351为伸缩机构、3511为叉托件、352为第二升降驱动机构、36为第三升降驱动机构、4为送料装置、41为第一直线滑台、42为第二直线滑台、43为治具、5为拍照台、6为图像采集器。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
27.本实用新型的核心是提供一种冲击力检测设备,其具有产品信息自动识别的功能。
28.请参考图1-图5,图1为本实用新型具体实施例所提供的冲击力检测设备的结构示意图;图2为图1中扫码装置的结构示意图;图3为第一安装组件和第一固定轴的结构示意图;图4为图1中撞击装置的结构示意图;
29.图5为图4中砝码提升释放机构的结构示意图。
30.如图1所示,本实用新型实施例提供一种冲击力检测设备,包括基座1、扫码装置2、撞击装置3和送料装置4,扫码装置2、撞击装置3和送料装置4分别设于基座1,扫码装置2用于识别工件的识别码;撞击装置3位于扫码装置2的一侧,用于对工件进行冲击检测;送料装置4用于带动工件在扫码装置2和撞击装置3之间转移。
31.工作时,将工件放置于送料装置4,通过送料装置4将工件移送到扫码装置2的扫码位,然后,利用扫码装置2对工件的识别码进行扫码识别,扫码装置2完成扫码后,再通过送料装置4将工件移送到撞击装置3的撞击位,利用撞击装置3对工件进行冲击检测。
32.可以看出,该冲击力检测设备在对工件进行冲击检测前,能够利用扫码装置2对工件进行自动扫码识别,代替人工对工件信息进行识别,这有利于对产品信息进行自动数据统计与分类等,扩展了冲击力检测设备的功能,而且,利用送料装置4实现工件在扫码装置2和撞击装置3之间的转移,给工件冲击力检测带来诸多便利,提高了整体检测效率,减轻了人工劳动强度。
33.需要说明的是,本实施例对扫码装置2的具体结构不做限定,只要扫码装置2能够识别工件的识别码即可,例如,在一些实施例中,扫码装置2包括扫码器21,扫码器21设于基座1的预设位置,利用扫码器21对工件的识别码进行自动扫码识别。
34.如图2所示,可以理解的是,不同型号的工件的识别码的高度及方位等可能存在不同,为了使扫码装置2能够对不同工件上不同高度及不同方位的识别码进行识别,提升扫码装置2的通用性,在一些实施例中,扫码装置2包括扫码器21,扫码器21的高度和角度均可调地设于基座1。也就是说,本实施例通过调整扫码器21的高度,可以使扫码器21对不同工件的不同高度的识别码进行识别;通过调整扫码器21的角度,可以使扫码器21对不同工件的
不同方位的识别码进行识别,从而使扫码装置2能够对不同工件上不同高度及不同方位的识别码进行识别,提升了扫码装置2的通用性。
35.需要说明的是,本实施例对扫码器21的高度调节的具体方式不做限定,例如,可以是这样的方案,基座1设有带有多个安装位置的调节板,不同安装位置的高度不同;扫码器21可安装于调节板的不同安装位置上,以实现扫码器21高度的调节。
36.请继续参考图2,考虑到扫码器21高度调节的方便性,在一些实施例中,扫码装置2还包括第一升降驱动机构22和第一固定轴23,第一升降驱动机构22设于基座1,用于输出沿第一方向的运动;第一固定轴23与第一升降驱动机构22滑动连接;扫码器21设于第一固定轴23。可以理解的是,当第一升降驱动机构22工作时,第一升降驱动机构22能够带动第一固定轴23沿第一方向往复运动,从而使第一固定轴23带动扫码器21沿第一方向运动,以调节扫码器21高度位置。也就是说,本实施例可利用第一升降驱动机构22带动扫码器21自动调节高度。
37.如图1所示,在一些实施例中,第一方向为z轴方向。
38.另外,上述实施例对扫码器21角度调节的具体方式不做限定,例如,可以是扫码器21可调节角度的设于第一固定轴23,也可以是第一固定轴23可调节角度的设于第一升降驱动机构22的输出端,或者是第一升降驱动机构22可调节角度的设于基座1。具体地调节方式,可以是通过可拆卸地方式改变扫码器21、第一固定轴23和/或第一升降驱动机构22的安装角度,使扫码器21、第一固定轴23和/或第一升降驱动机构22固定于不同的安装角度,从而实现扫码器21角度的调节。
39.请继续参考图2,考虑到扫码器21角度调节的方便性,在一些实施例中,第一固定轴23设有第一安装组件24,第一安装组件24包括第一安装件241和第二安装件242,第一安装件241转动设于第一固定轴23,且第一安装件241沿第一转动方向转动,第一转动方向为绕第一固定轴23的轴线转动的方向;第二安装件242转动连接第一安装件241,第二安装件242沿第二转动方向转动,第二转动方向为绕垂直于第一固定轴23的轴线转动的方向;其中,扫码器21包括第一扫码器211,第一扫码器211与第二安装件242相连。和/或,第一固定轴23设有第二安装组件25,第二安装组件25包括第三安装件251、第四安装件252和第五安装件253,第三安装件251转动设于第一固定轴23,且第三安装件251沿第一转动方向转动,第一转动方向为绕第一固定轴23的轴线转动的方向;第四安装件252转动连接第三安装件251,第四安装件252沿第二转动方向转动,第二转动方向为绕垂直于第一固定轴23的轴线转动的方向;第五安装件253转动连接第四安装件252,第五安装件253沿第三转动方向转动,第三转动方向为绕平行于第一固定轴23的轴线转动的方向;其中,扫码器21包括第二扫码器212,第二扫码器212与第五安装件253相连。
40.如图2所示,在一些实施例中,第一转动方向为绕x轴转动的方向;第二转动方向为绕y轴转动的方向;第三转动方向与第一转动方向相同,为绕x轴转动的方向。
41.也就是说,本实施例通过调整第一安装件241相对第一固定轴23的位置,可调节第一扫码器211绕第一固定轴23转动方向的角度,通过调整第二安装件242相对第一安装件241的位置,可以调节第一扫码器211绕垂直于第一固定轴23的轴线转动方向的角度;由此可见,本实施例可实现第一扫码器211沿两个方向的角度调节,使第一扫码器211的角度调节更灵活。
42.另外,本实施例通过调整第三安装件251相对第一固定轴23的位置,可调节第二扫码器212绕第一固定轴23转动方向的角度,通过调整第四安装件252相对第三安装件251的位置,可以调节第二扫码器212绕垂直于第一固定轴23的轴线转动方向的角度;通过调整第五安装件253相对第四安装件252的位置,可以调节第二扫码器212绕平行于第一固定轴23的轴线转动方向的角度;由此可见,本实施例可实现第二扫码器212沿三个方向的角度调节,使第二扫码器212的角度调节更灵活;进一步地,由于第三安装件251沿第一转动方向的位置可调,第一转动方向为绕第一固定轴23转动的方向,第五安装件253沿第三转动方向的位置可调,第三转动方向为绕平行于第一固定轴23的轴线转动的方向,因此,使得第二扫码器212绕第一固定轴23转动方向的角度调节范围更广。
43.需要说明的是,本实施例对第一安装件241沿第一转动方向的位置可调的具体实现方式不做限定。如图3所示,考虑到结构的简单及便于实现性,在一些实施例中,第一安装件241设有第一卡槽2411和与第一卡槽2411连通的第一连接槽2412,第一卡槽2411用于穿设第一固定轴23,第一连接槽2412自第一卡槽2411延伸至第一安装件241的端部,使第一安装件241上形成相对设置的第一连接板2413和第二连接板2414,第一连接板2413和第二连接板2414通过第一连接螺栓244锁紧固定;当第一连接螺栓244锁紧第一连接板2413和第二连接板2414时,使第一连接板2413和第二连接板2414相互靠近,第一连接槽2412收缩,此时,使第一卡槽2411抱紧第一固定轴23,实现第一安装件241与第一固定轴23的固定;当松开第一连接螺栓244时,可通过转动第一安装件241,使第一卡槽2411相对第一固定轴23转动,实现第一扫码器211角度的调整,当调整到位后,再通过第一连接螺栓244锁紧第一连接板2413和第二连接板2414即可。
44.请继续参考图3,另外,上述实施例对第二安装件242沿第二转动方向的位置可调的具体实现方式不做限定,考虑到结构的简单及便于实现性,在一些实施例中,第一安装件241设有第二卡槽(图未示)和与第二卡槽连通的第二连接槽2415,第二连接槽2415自第二卡槽延伸至第一安装件241的另一端部,使第一安装件241上形成相对设置的第三连接板2416和第四连接板2417;第二安装件242设有第三卡槽2421和与第三卡槽2421连通的第三连接槽2422,第三连接槽2422自第三卡槽2421延伸至第二安装件242的端部,使第二安装件242上形成相对设置的第五连接板2423和第六连接板2424;第二卡槽和第三卡槽2421同轴设置,且第二卡槽和第三卡槽2421内穿设有连接轴243;第三连接板2416和第四连接板2417通过第二连接螺栓245锁紧固定;第五连接板2423和第六连接板2424通过第三连接螺栓246锁紧固定。当第二连接螺栓245将第三连接板2416和第四连接板2417锁紧,且第三连接螺栓246将第五连接板2423和第六连接板2424锁紧时,第一安装件241和第二安装件242分别抱紧连接轴243,实现第一安装件241和第二安装件242的固定连接;当松开第二连接螺栓245或第三连接螺栓246时,可调节第一安装件241和第二安装件242的相对安装角度,实现第二扫码器212角度的调节,当调整到位后,再通过第二连接螺栓245将第三连接板2416和第四连接板2417锁紧,并通过第三连接螺栓246将第五连接板2423和第六连接板2424锁紧即可。
45.需要说明的是,第三安装件251与第一固定轴23的连接方式和第一安装件241与第一固定轴23的连接方式相同;第四安装件252与第三安装件251的连接方式和第二安装件242与第一安装件241的连接方式相同;第五安装件253与第四安装件252的连接方式也和第二安装件242与第一安装件241的连接方式相同,在此不再赘述。
46.另外,需要说明的是,上述各个实施例中,对扫码器21的具体数量不做限定,扫码器21的数量可以为一个,也可以为两个以上,当扫码器21的数量为一个时,可以为第一扫码器211,也可以为第二扫码器212;当扫码器21的数量为两个以上时,可以包括至少一个第一扫码器211和至少一个第二扫码器212。
47.当第一扫码器211的数量为两个以上时,不同的第一扫码器211在第二安装件242上的安装角度可以不同;当第二扫码器212的数量为两个以上时,不同的第二扫码器212在第五安装件253上的安装角度可以不同;这样,有利于使不同的第一扫码器211具有不同的安装角度;使不同的第二扫码器212具有不同的安装角度;从而可以使不同的第一扫码器211或第二扫码器212对应工件的不同侧面。
48.在一些实施例中,扫码器21的数量为至少两个,设于基座1的不同位置,用于识别工件不同侧面的识别码。
49.例如,如图2所示,在一些实施例中,扫描器的数量为三个,其中,第一扫码器211的数量为一个,第二扫码器212的数量为两个,两个第二扫码器212分别在对应的第五安装件253上的安装角度不同,第一扫码器211用于识别工件正面的识别码;一个第二扫码器212用于识别工件后面的识别码;另一个第二扫码器212用于识别工件侧面的识别码。可以理解的是,第一扫码器211和两个第二扫码器212分别位于基座1上对应扫码位的不同位置,以当工件被送料装置4移送至扫码位时,能够对应工件的不同侧面,实现对工件不同侧面的识别码的识别。
50.另外,可以理解的是,当撞击装置3对工件进行冲击检测后,人工将工件从送料装置4取下,可通过肉眼观察冲击效果,例如,是否存在压痕或压裂等;人工也可以将工件送到专门的拍照检测装置,利用拍照检测装置对工件的冲击效果进行检测。
51.如图1所示,考虑到对冲击效果检测的方便性,在一些实施例中,冲击力检测设备还包括拍照台5和图像采集器6,拍照台5设于基座1,用于放置冲击后的工件;图像采集器6设于拍照台5的上方,用于对冲击后的工件进行拍照。也就是说,当撞击装置3对工件进行冲击检测后,人工将工件从送料装置4取下,然后将工件放置到拍照台5上,利用图像采集器6对工件进行拍照,这有利于利用图像采集器6保存并上传工件的冲击效果。可见,本实施例将拍照台5和图像采集器6集成于冲击力检测设备,使冲击力检测设备还具有拍照检测冲击效果的功能,方便人工操作。
52.进一步地,如图2所示,为了方便调整图像采集器6的高度位置,以便于图像采集器6能够对不同高度的工件进行拍照检测,在一些实施例中,第一升降驱动机构22还连接有第二固定轴26,图像采集器6设于第二固定轴26,第一升降驱动机构22还用于通过第二固定轴26带动图像采集器6沿第一方向朝向或远离拍照台5运动。也就是说,本实施例利用第一升降驱动机构22带动第二固定轴26沿第一方向运动,从而使第二固定轴26带动图像采集器6沿第一方向运动,以调节图像采集器6高度,实现图像采集器6对不同高度工件的检测,通用性高。
53.需要说明的是,本实用新型实施例对第一固定轴23及第二固定轴26分别与第一升降驱动机构22的连接方式不做限定,请继续参考图2,考虑到连接的方便性,在一些实施例中,第一升降驱动机构22连接有固定块27,固定块27连接有第六安装件28,第六安装件28与第一固定轴23的连接方式和第一安装件241与第一固定轴23的连接方式相同,在此不再赘
述。本实施例通过第一固定轴23与第六安装件28的连接,实现第一固定轴23与第一升降驱动机构22输出端的间接连接。
54.请继续参考图2,考虑到第一固定轴23固定的稳定性,在上述实施例的基础之上,还可以进一步设置第七安装件29,使第七安装件29与固定块27连接,通过第七安装件29来进一步固定第一固定轴23,第一固定轴23与第七安装件29的连接方式,可以和第一固定轴23与第六安装件28的连接方式相同。
55.另外,在一些实施例中,第二固定轴26安装于第六安装件28,第二固定轴26与第六安装件28的连接方式和第一固定轴23与第六安装件28的连接方式相同,在此不再赘述。
56.另外,在本实用新型的各个实施例中,对第一升降驱动机构22的具体结构不做限定,在一些实施例中,第一升降驱动机构22为滑台模组。
57.进一步地,上述各个实施例对撞击装置3的具体结构不做限定,只要能够对工件进行冲击检测即可。
58.如图4所示,在一些实施例中,撞击装置3包括支架31、冲击头32、滑槽33、砝码34和砝码提升释放机构35,支架31主要起到支撑作用,冲击头32、滑槽33和砝码提升释放机构35均设于支架31,其中,冲击头32可沿第一方向滑动地设于支架31,砝码34可沿第一方向滑动地设于滑槽33且位于冲击头32的上方,砝码提升释放机构35用于驱动砝码34沿第一方向上升至预设高度时,释放砝码34,使砝码34在自身重力下朝向冲击头32运动,以撞击冲击头32。
59.也就是说,当送料装置4将工件输送到撞击位时,工件位于冲击头32的下方,此时,利用砝码提升释放机构35带动砝码34沿第一方向提升到预设高度,然后,再将砝码34释放,使砝码34自由下落在冲击头32上,通过冲击头32撞击工件,实现对工件的冲击检测。
60.需要说明的是,本实施例对砝码34的具体数量和规格不做限定,在一些实施例中,滑槽33设有多种不同规格的砝码34,以使多个砝码34同时作用,对冲击头32产生撞击。可以理解的是,当滑槽33内设有多个砝码34时,砝码提升释放机构35可以通过提升或释放最下方的一个砝码34,使多个砝码34整体被提升或下降。
61.另外,本实施例对砝码提升释放机构35的具体结构不做限定,只要能够将砝码34提升至预设高度后再使砝码34下降即可。
62.如图5所示,在一些实施例中,砝码提升释放机构35包括伸缩机构351和第二升降驱动机构352,伸缩机构351的伸出端设有叉托件3511,伸缩机构351用于驱动叉托件3511沿垂直于第一方向的第二方向朝向或远离砝码34运动;当叉托件3511朝向沿第二方向朝向砝码34运动时,能够伸入砝码34的底部,以抵接砝码34;当叉托件3511沿第二方向远离砝码34运动时,能够释放砝码34;第二升降驱动机构352的输出端与伸缩机构351相连,用于驱动伸缩机构351沿第一方向往复运动,以使伸缩机构351通过叉托件3511带动砝码34沿第一方向运动。工作时,第二升降驱动机构352带动伸缩机构351沿第一方向下降到位于滑槽33最下方的砝码34的位置,然后,伸缩机构351带动叉托件3511沿第二方向朝向砝码34运动,使叉托件3511伸入至砝码34的底部以抵接砝码34,第二升降驱动机构352再带动伸缩机构351沿第一方向上升至预设高度,使叉托件3511将砝码34托起至预设高度,然后,伸缩机构351带动叉托件3511沿第二方向远离砝码34运动以释放砝码34,使砝码34在自身重力作用下,自由下落到冲击头32上,使冲击头32对工件产生冲击力,实现对工件的冲击检测。可以看出,
这种结构简单,便于实现。
63.如图1所示,在一些实施例中,第二方向为y轴方向。
64.另外,本实施例对叉托件3511的具体结构不做限定,只要能够伸入至砝码34的底部以抵接砝码34即可,例如,如图5所示,在一些实施例中,叉托件3511为板状件。当然,在另一些实施例中,叉托件3511也可以包括至少两个杆状件。
65.在一些实施例中,第二升降驱动机构352为滑台模组。
66.在一些实施例中,伸缩机构351为气缸。
67.当然,砝码提升释放机构35也可以是升降驱动机构加负压吸盘的方案,或是升降驱动机构加磁铁的方案。也即,通过负压吸盘的负压吸力或磁铁的磁吸力吸附最下方的砝码34,然后,利用升降驱动机构带动负压吸盘或磁铁上升,将砝码34抬升至预设高度,然后,通过使负压吸盘的负压吸力消失或使磁铁的磁吸力消失,释放砝码34,使砝码34自由下落到冲击头32上。
68.需要说明的是,本实施例对支架31的具体结构不做限定,只要能够起到支撑作用即可。在一些实施例中,支架31为框架式结构,砝码提升释放机构35设于支架31内部。
69.另外,本实施例对冲击头32与支架31的具体连接方式不做限定,在一些实施例中,冲击头32通过滑动轴承与支架31相连。
70.如图4所示,进一步地,为了使撞击装置3能够适应不同高度的工件,在一些实施例中,撞击装置3还包括第三升降驱动机构36,第三升降驱动机构36连接支架31,用于驱动支架31沿第一方向往复运动。也就是说,本实施例利用第三升降驱动机构36驱动支架31带动冲击头32、滑槽33、砝码34和砝码提升释放机构35整体升降,以使冲击头32与任意高度的工件之间具有合适的相对位置,从而使撞击装置3能够适应不同高度的工件,提升撞击装置3的通用性。
71.在一些实施例中,第三升降驱动机构36为滑台模组。
72.请继续参考图4,另外,为了便于增减或更换砝码34,在一些实施例中,滑槽33的顶部设有用于供砝码34进出的开口。也就是说,本实施例通过从滑槽33的开口处增减砝码34或更换不同规格的砝码34,来调整砝码34对冲击头32施加的冲击力,使得撞击装置3对工件施加的冲击力可调。
73.需要说明的是,在上述各个实施例中,对送料装置4的具体结构不做限定,只要能够实现工件的输送即可。在一些实施例中,送料装置4能够定位至上料位、扫码位和撞击位。当送料装置4定位到上料位时,方便对工件进行上、下料;当送料装置4定位到扫码位时,方便扫码装置2对工件进行扫码识别;当送料装置4定位到撞击位时,方便撞击装置3对工件进行冲击检测。
74.如图1所示,在一些实施例中,送料装置4包括:第一直线滑台41、第二直线滑台42和治具43,第一直线滑台41连接第二直线滑台42,第一直线滑台41与第二直线滑台42形成十字滑台;治具43设于第二直线滑台42,且治具43用于放置工件;其中,第一直线滑台41沿第三方向设置,第二直线滑台42沿第二方向设置,第一直线滑台41能够通过第二直线滑台42和治具43带动工件沿第三方向往复运动,第二直线滑台42能够通过治具43带动工件沿第二方向往复运动,从而实现工件在扫码装置2和撞击装置3之间转移。其中,第三方向垂直于第一方向和第二方向。如图1所示,在一些实施例中,第三方向为x轴方向。
75.请参考图1-5,上述的冲击力检测设备的工作过程为:
76.利用第一直线滑台41和第二直线滑台42带动治具43运动至上料位,人工将工件放置于治具43上。
77.利用第一直线滑台41和第二直线滑台42带动治具43运动至扫码位,利用扫码装置2对治具43上的工件的识别码进行扫码识别。
78.其中,在利用扫码装置2对治具43上的工件的识别码进行扫码识别之前,通过第一升降驱动机构22带动第一固定轴23沿第一方向往复运动,使第一固定轴23带动扫码器21沿第一方向运动,以调节扫码器21高度位置,确保扫码器21具有合适的高度。另外,通过调整第一安装件241相对第一固定轴23的位置,调节第一扫码器211绕第一固定轴23转动方向的角度,和/或,通过调整第二安装件242相对第一安装件241的位置,调节第一扫码器211绕垂直于第一固定轴23的轴线转动方向的角度,从而确保第一扫码器211具有合适的拍摄角度。进一步地,通过调整第三安装件251相对第一固定轴23的位置,调节第二扫码器212绕第一固定轴23转动方向的角度,和/或,通过调整第四安装件252相对第三安装件251的位置,调节第二扫码器212绕垂直于第一固定轴23的轴线转动方向的角度,和/或,通过调整第五安装件253相对第四安装件252的位置,调节第二扫码器212绕平行于第一固定轴23的轴线转动方向的角度,从而确保第二扫码器212具有合适的拍摄角度。进而利用第一扫码器211和第二扫码器212对工件不同侧面的识别码进行扫码识别。
79.扫码完成后,利用第一直线滑台41和第二直线滑台42带动治具43运动至撞击位,利用撞击装置3对工件进行冲击检测。
80.其中,在治具43带动工件运动至撞击位之前,利用第三升降驱动机构36驱动支架31带动冲击头32、滑槽33、砝码34和砝码提升释放机构35整体升降,以使冲击头32具有合适的高度位置,以适应当前工件。当治具43带动工件运动至撞击位时,第二升降驱动机构352带动伸缩机构351沿第一方向下降到位于滑槽33最下方的砝码34的位置,然后,伸缩机构351带动叉托件3511沿第二方向朝向砝码34运动,使叉托件3511伸入至砝码34的底部以抵接砝码34,第二升降驱动机构352再带动伸缩机构351沿第一方向上升至预设高度,使叉托件3511将砝码34托起至预设高度,然后,伸缩机构351带动叉托件3511沿第二方向远离砝码34运动以释放砝码34,使砝码34在自身重力作用下,自由下落到冲击头32上,使冲击头32对工件产生冲击力,实现对工件的冲击检测。冲击检测完成后,利用第一直线滑台41和第二直线滑台42带动治具43运动至上料位,人工将工件从治具43取下,再将工件放置于拍照台5上,通过第一升降驱动机构22带动第二固定轴26沿第一方向运动,使第二固定轴26带动图像采集器6沿第一方向运动,调节图像采集器6至合适的高度,利用图像采集器6对工件进行拍照,从而可利用图像采集器6保存并上传工件的冲击效果。
81.拍照完成后,将工件从拍照台5即可。
82.还需要说明的是,在本说明书中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。
83.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其它实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
84.以上对本实用新型所提供的冲击力检测设备进行了详细介绍。本文中应用了具体
个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以对本实用新型进行若干改进和修饰,这些改进和修饰也落入本实用新型权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。