1.本发明涉及机器人领域,特别涉及一种智能家居清洁环保机器人。
背景技术:
2.随着我国经济的快速发展,使得我国人民的经济水平有了较高的提升,对于生活的品质也有了不同的理解,在现代家居中,扫地机器人的出现给人们的生活带来了巨大的便利,扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。
3.现有的家用扫地机器人一般都只能通过吸尘装置来清理小型垃圾或者灰尘,但是对于较大的垃圾,这类家用扫地机器人就起不到太大的作用,往往还是需要人为对这些垃圾进行处理,并且大部分扫地机器人只具备吸收垃圾的功能,没有洒水拖地等的功能。
技术实现要素:
4.本发明的目的就是解决现有技术中的问题,提出了一种智能家居清洁环保机器人,可有效解决背景技术中存在的问题。
5.为实现上述目的,本发明的技术方案为一种智能家居清洁环保机器人,包括环保机器人本体以及和环保机器人本体固定在一起的水箱,所述水箱能够储存水,所述环保机器人本体顶部设置有台座,所述台座前端固定设置有识别设备,所述台座顶部设置有机械手,所述台座内侧连接有垃圾桶,识别设备可以识别垃圾,机械手能够拾取垃圾,垃圾桶能够储存垃圾;所述水箱背部设置有拖地机构,拖地机构能够进行拖地,所述拖地机构包括气缸、活塞杆、滑板、连接板、拖布,所述气缸通过螺栓固定在水箱上,且内部连接有活塞杆,所述活塞杆一端和滑板活塞杆,所述滑板和连接板固定在一起,所述滑板和连接板之间形成拖布卡位,所述拖布固定在拖布卡位中。
6.作为优选,所述水箱内部设置有控水机构,所述控水机构包括电机、螺杆、滑杆、滑块和盖板,所述电机固定在水箱内部,所述螺杆与电机的输出轴连接,所述滑块和盖板固定在一起,且滑块连接在螺杆和滑杆上,所述盖板贴合在水箱底部。
7.作为优选,所述水箱底部设置有若干出水孔,所述出水孔能够完全被盖板覆盖住,所述水箱侧壁上还设置有刻度表,所述水箱底部还设置有注水口。
8.作为优选,所述控水机构和出水孔起着出水和控水的作用。
9.作为优选,所述环保机器人本体还设置有防撞装置,所述防撞装置可以保护环保机器人本体,所述防撞装置包括弧形连接板、若干减震弹簧和弧形挡板,所述弧形连接板固定在环保机器人本体前端,所述减震弹簧位于弧形连接板与弧形挡板之间用于连接弧形连接板与弧形挡板,所述弧形挡板外侧还设置有缓冲垫,所述缓冲垫采用硅胶材质制成。
10.作为优选,所述环保机器人本体顶部设置有桶槽,所述桶槽内部设置有电磁石,所述垃圾桶底部设置有铁圈,所述垃圾桶底部设置有铁圈,所述垃圾桶固定在桶槽中,所述垃圾桶形状为圆形或者矩形,相应的桶槽的形状也为圆形或者矩形。
11.作为优选,所述环保机器人本体底部前端还设置有重力万向轮,所述环保机器人本体底部后端以及水箱底部都设置有平衡轮,所述重力万向轮能够起着移动和改变方向的作用,所述重力万向轮有着平衡和辅助设备移动的作用。
12.作为优选,所述环保机器人本体底部还设置有边刷,所述边刷有两个,分别位于重力万向轮的两侧,所述边刷有着集中和清扫小型垃圾和灰尘的作用。
13.作为优选,所述环保机器人本体底部还设置有吸尘机构,所述吸尘机构能够对小型垃圾和灰尘进行吸收处理。
14.与现有技术相比,本发明具有如下有益效果:
15.1.本发明设置有水箱,水箱内部设置有控水机构,水箱底部设置有出水孔,控水机构中的盖板可以完全覆盖住出水孔,通过盖板覆盖出水孔和不覆盖出水孔来到达是否洒水的目的,水箱背部的拖地机构中的拖布在活塞杆的作用下能够与底面接触进行拖地,通过设计的拖地机构和控水机构能够达到洒水拖地的目的,使得环保机器人功能更加多样化。
16.2.本发明通过识别装置、机械手、边刷和吸尘机构能够对大型垃圾。小型垃圾已经灰尘进行分别处理。
17.3.本发明设置有防撞装置,通过防撞装置和重力万向轮,使得环保机器人在碰到障碍物时能够自动调整方向。
附图说明
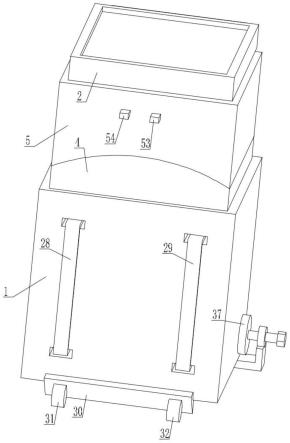
18.图1是本发明整体结构示意图;
19.图2是本发明背部结构示意图;
20.图3是本发明仰视示意图;
21.图4是本发明俯视示意图;
22.图5是本发明局部剖视图。
23.图中:1—环保机器人本体、2—水箱、3—台座、4—识别设备、5—识别设备、6—垃圾桶、7—拖地机构、71—气缸、72—活塞杆、73—滑板、74—连接板、75—拖布、76—拖布卡位、8—控水机构、81—电机、82—螺杆、83—滑杆、84—滑块、85—盖板、9—出水孔、10—刻度表、11—注水口、12—桶槽、13—电磁石、14—平衡轮、15—边刷、16—吸尘机构、17—防撞装置、171—弧形连接板、172—减震弹簧、173—弧形挡板、174—缓冲垫、18—重力万向轮
24.本发明的特征及优点将通过实施例结合附图进行详细说明。
具体实施方式
25.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
26.如图1-5所示,一种智能家居清洁环保机器人,包括环保机器人本体1以及和环保机器人本体1固定在一起的水箱2,所述环保机器人本体1底部前端还设置有重力万向轮18,重力万向轮18有着改变方向的作用,所述环保机器人本体1底部后端以及水箱2底部都设置有平衡轮14,平衡轮14起着平衡和辅助移动的作用。
27.本实施例中,所述环保机器人本体1顶部设置有台座3,所述台座3前端固定设置有识别设备4,所述台座3顶部设置有机械手5,所述台座3内侧连接有垃圾桶6,所述环保机器
人本体1顶部设置有桶槽12,所述桶槽12内部设置有电磁石13,所述机械手5底部设置有铁圈,所述垃圾桶6固定在桶槽12中,所述垃圾桶6形状为圆形或者矩形,相应的桶槽12的形状也为圆形或者矩形,具体来说,为了能够使得本发明具有清理大型垃圾的功能,在环保机器人本体1上增加了识别设备4、机械手5和垃圾桶6,智能家居清洁环保机器人在运行的时候,会通过识别设备4对周围环境进行识别,当发现较大的垃圾时,智能家居清洁环保机器人会移动到垃圾附近,并通过机械手5将垃圾拾起并丢入到垃圾桶6中,当垃圾桶6中的垃圾装满或者需要集中处理时,可将电磁铁13断电,这时电磁铁13失去磁性,就能把垃圾桶6从桶槽12中取出,利用机械手5对较大的垃圾进行处理,减轻了用户的工作量也保证了用户的安全。
28.本实施例中,所述环保机器人本体1底部还设置有边刷15,所述边刷15有两个,分别位于重力万向轮18的两侧,所述环保机器人本体1底部还设置有吸尘机构16,具体来说,通过边刷15和吸尘机构16能够对小型垃圾和灰尘进行清理,边刷15能够对小型垃圾和灰尘进行清扫,然后通过吸尘机构16进入到环保机器人本体1中。
29.本实施例中,所述水箱2内部设置有控水机构8,所述控水机构8包括电机81、螺杆82、滑杆83、滑块84和盖板85,所述电机81固定在水箱2内部,所述螺杆82与电机81的输出轴连接,所述滑块84和盖板85固定在一起,且滑块84连接在螺杆82和滑杆83上,滑块84在电机8和螺杆82的作用下能够在螺杆82和滑杆83上进行移动,带动盖板85进行移动,所述盖板85贴合在水箱2底部,所述水箱2底部设置有若干出水孔9,所述出水孔9能够完全被盖板85覆盖住,盖板85的移动能够达到覆盖和不覆盖出水孔9的目的,当盖板85覆盖住所有的出水孔9时,这时水就不会从出水孔9中流出了,出水孔9设置有多排,通过盖板85覆盖多少排出水孔9能够起到调节出水量的作用,所述水箱2侧壁上还设置有刻度表10,所述水箱2底部还设置有注水口11,刻度表10能够观察水箱2中的水量,当水不够时可以从注水口11中添加,具体来说,为了使智能家居清洁环保机器人能够自动洒水,设计了水箱2、控水机构8和出水孔9,并在水箱2内部设置了控水机构8和出水孔9,在清洁过程中,如果需要洒水,就通过电机8控制盖板85移动,使得盖板85不覆盖出水孔9,这时水就能从水箱2中流出,就能对地面进行洒水,在清理垃圾的同时能够对地面进行洒水,减少了用户的工作量。
30.本实施例中,所述水箱2背部设置有拖地机构7,所述拖地机构7包括气缸7、活塞杆72、滑板73、连接板74和拖布75,所述气缸71通过螺栓固定在水箱2上,且内部连接有活塞杆72,所述活塞杆72一端和滑板73活塞杆72,所述滑板73和连接板74固定在一起,所述滑板73和连接板74之间形成拖布卡位76,所述拖布75固定在拖布卡位76中,活塞杆72运动时能够带动滑板73、连接板74和拖布75进行运动,具体来说,为了使智能家居清洁环保机器人能够自动洒水,设计了拖地机构7,拖布75为可替换式,卡在拖布卡位76中,当需要进行拖地时,将拖布75套在拖布卡位76中,通过活塞杆72向下运动,带动拖布75一起向下运动,直到接触到地面,这样智能家居清洁环保机器人在行驶的过程中就能够进行拖地,当不需要拖地时可通过活塞杆72回收,可以将拖布75带离地面。
31.本实施例中,拖地机构7位于出水孔9的后方,这样刚好再洒水之后进行拖地,能够将地面打扫的更加干净。
32.本实施例中,所述环保机器人本体1还设置有防撞装置17,所述防撞装置17包括弧形连接板171、若干减震弹簧172和弧形挡板173,减震弹簧172起着减震的作用,在受到撞击
时,减震弹簧172会发生形变,减少了冲击力,保护了环保机器人本体1,所述弧形连接板171固定在环保机器人本体1前端,所述减震弹簧172位于弧形连接板171与弧形挡板173之间用于连接弧形连接板171与弧形挡板173,所述弧形挡板173外侧还设置有缓冲垫174,所述缓冲垫174采用硅胶材质制成,缓冲垫174起着缓冲减震的作用,在受到撞击时,增加了缓冲力,保护了环保机器人本体1,具体来说,为了保护环保机器人本体1,在环保机器人本体1的前端设置了防撞装置17,当环保机器人本体1碰到障碍物时减震弹簧172和缓冲垫174一起起着缓冲减震的作用,保护了环保机器人本体1,延长了使用寿命,在由于还设置有重力万向轮18,所以在受到撞击时,智能家居清洁环保机器人还好改变方向。
33.需要注意的是,本发明为一种智能家居清洁环保机器人,其工作原理为:
34.当智能家居清洁环保机器人开始工作时,识别设备4能够识别周围的大型垃圾,这时就会控制机械手5对大型垃圾进行拾取,并将其丢入到垃圾桶6中,智能家居清洁环保机器人在移动的过程中边刷15会不断的扫着小型垃圾和灰尘,然后吸尘机构16会将小型垃圾和灰尘吸入到环保机器人本体中;如果需要洒水时,可通过控制盖板85不完全将出水孔6覆盖住,这时水仅能从出水孔6流出;如果需要进行拖地时,可通过控制活塞杆72向下移动带动拖布75接触地面,从而进行拖地;本发明功能强大,清洁能力强,能够满足用户各种需求,减轻了用户的劳动量。
35.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。