1.本发明涉及扫地机器人技术领域,尤其是指一种杀菌除虫扫地机器人。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,随着国内生活水平的不断提高,人们对生活品质的要求提高,智能家居被越来越多的人选择使用,而扫地机器人能凭借一定的人工智能,自动在房间内完成地板清理工作,受到了广泛青睐。
3.现今,人们对于室内清洁度的要求不再满足于清理灰尘碎屑,病毒、细菌、螨虫和蟑螂等微小生物的清理工作也越来越被重视,而现有的扫地机器人通常采用持续输出形式的光源进行杀菌、害虫,缺乏“识别-智能锁定-高效清除-反馈”机制,不仅造成了能源的浪费,杀菌、害虫效率和效果低下,过高的温度还会对装饰(地板、地毯等)结构造成破坏,降低了现有的杀菌、害虫扫地机器人的实用性。而且现有的扫地机器人采取大范围杀菌除螨,不具备识别性和精准清除性,光源需要一直打开进行杀菌除螨,因此不能长时间的进行杀菌除螨工作,否则会损害机体,还存在伤害清扫区域材质和人体健康的可能性。现有的扫地机器人采取单光源进行杀菌除螨,所需要的功率过大,对机器人的负载过大,对机器人的配置要求高,另外,单光源杀菌除螨所需时间过长,导致杀菌除螨效率下降,不能全面的进行杀菌除螨。现有的扫地机器人不具备监测反馈机制,无法实时监测杀菌除螨的温度和时间,红外/紫外光和高温可能会对清扫区域材质和人体产生伤害。且不具备细菌螨虫死亡后的反馈机制,无法确保细菌和螨虫的死亡,而且会导致细菌螨虫已被杀死,但机体还在进行杀菌除螨工作,浪费能源的消耗,另外长时间工作会导致光源部件的损耗,减少机体部件的寿命。现有的扫地机器人对光源的利用不够充分,仅在扫地机器人内部配备紫外光,但并无其他部件与之配合,且紫外光只能对物体表面进行杀菌除虫,对于内部的细菌、害虫无法起到消杀作用,不仅如此,紫外光消毒后不能保持持续杀菌能力,病原体在光合作用或者“暗修复”的机制下存在自我修复的可能。现有的扫地机器人通过液体消毒法进行杀菌除虫,而消毒水等液体消毒法作用时间较长,化学成分较多,且操作安全性较低,同时,收集灰尘的储灰槽内部由于灰尘与潮湿的液体接触,容易导致灰尘沾上水分后粘连在储灰槽的内部,不便于对灰尘进行清理,另一方面,水箱在使用过程中也会滋生大量细菌及藻类,影响生活健康和卫生,最后,通过液体消毒法进行处理的地面会留下水渍,使得后续对地面的清洁工作难度增加,难以排走的水分容易使室内滋生细菌。
4.公开号为cn205994454u的专利公开了一种具有杀菌除螨的功能的新型扫地机器:uv灯与主控模块相连发出用于杀菌除螨的光;公开号为cn108606732a的专利公开了一种具有杀菌功能的扫地机器人:使用雾化喷头释放消毒液并且同时用紫外线杀菌灯对地面上的细菌进行消毒杀菌;公开号为cn209171199u的专利公开了一种具备紫外灯的扫地机器人装置:运用控制模板朝地面方向发射紫外光线,在执行清扫工作的同时能够执行杀菌作业;公开号为cn211582927u的专利公开了一种具有杀菌消毒功能的扫地机器人:通过底部的紫外
线灯进行紫外线消毒,并通过人体感应器实现人来灯灭,同时设有雾化器,可实现清洁、杀菌消毒及加湿;公开号为cn212489764u的专利公开了一种利用臭氧水消毒的扫地机器人:超声波雾化器可将臭氧水雾化为穿透力极强的雾状臭氧水,对地面、空气以及家具内部进行全方位的杀菌消毒;公开号为cn210612037u的专利公开了一种扫地机器人杀菌组件:紫外led灯珠与led电路板连接,向下发射紫外光线进行杀菌;公开号为cn211658066u的专利公开了一种具有第一杀菌装置的扫地机器人:第一紫外灯和吸入口均设置在机体的底部,光触媒涂层设置在与第一紫外灯相对的挡板表面上;以上专利均为通过紫外线、雾状臭氧水或光触媒涂层进行杀菌除虫,其仍然存在上述的伤害清扫区域材质和人体健康的可能性。
技术实现要素:
5.为此,本发明所要解决的技术问题在于克服现有技术中缺乏“识别-智能锁定-高效清除-反馈”机制,导致能源的浪费,杀菌、害虫效率和效果低下和对装饰(地板、地毯等)结构的破坏的问题,因而提供一种易于控制强度、具备识别性和精准消除性、采用多光源且具备反馈机制的杀菌、害虫扫地机器人。
6.为解决上述技术问题,本发明提供了一种杀菌除虫扫地机器人,包括:
7.壳体,所述壳体内设有空腔;
8.感应模块,所述感应模块设置在所述壳体的底部,所述感应模块可选择红外感应器或光电传感器,所述感应模块用于感应细菌、害虫;所述感应模块具备反馈机制,当感应模块感应不到细菌和害虫时,表示细菌害虫已被消杀,感应模块将此信息反馈至主控模块,从而对其他清扫区域进行工作。
9.图像采集模块,所述图像采集模块,所述图像采集模块可选择高分辨率摄像头,对清扫区域进行三维扫描,可以采集清扫区域的图像,并传导至主控板上进行处理分析,将感应器感应到的螨虫位置转换为坐标信息,以机体的中心点为原点,x轴方向为机器人前进方向的垂直方向,y轴方向为机器人的前进方向,z轴方向为清扫区域的垂直方向,表示螨虫在清扫区域的深度;
10.激光发生模块,所述激光发生模块包括第一驱动源和多个激光发生器和,设置在所述壳体的底部,并有旋转机构,可以旋转360
°
,所述第一驱动源设置在所述空腔内且与所述激光发生器相连,所述激光发生模块与主控制板连接,可控制多光源之间的配合;
11.温度传感器,所述温度传感器设置在所述壳体的底部,所述温度传感器用于监测清扫区域的温度;
12.时间继电器,所述时间继电器设置在所述空腔内,接受了信号后开始计时与结束,推动后续的电路工作,其延时性能在设计的范围内是可以调节的,通过设置延长时间,仅通过主控模块中信号的触发开始计时,倒计时结束后自动触发行动信号传送给主控模块;
13.主控模块,所述主控模块设置在所述空腔内,所述感应模块、所述图像采集模块、所述激光发生模块、所述温度传感器和所述时间继电器均与所述主控模块连接;
14.所述图像采集模块采集当前清扫区域的图像,感应模块检测到细菌、害虫时,计算细菌、害虫所在的位置,所述主控模块控制第一驱动源驱动多个激光发生器同时转动,使多个激光发生器集中照射至细菌、害虫所在位置,当时间继电器计时完成或在清扫区域内未
检测到细菌、害虫后,感应模块将此信息反馈至主控模块,从而控制所述激光发生器停止工作。
15.作为本发明的进一步改进,计算细菌、害虫所在的位置时,建立坐标系获得设置在所述图像采集模块采集范围内的参照物的坐标,当所述感应模块检测到细菌、害虫时,所述图像采集模块采集清扫区域的图像,根据采集到的清扫区域的图像中参照物的位置与细菌、害虫的位置进行对比,计算得到细菌、害虫所在的坐标。
16.作为本发明的进一步改进,所述感应模块为细菌、害虫图像特征感应器、红外感应器和光电传感器中的一种或多种。
17.作为本发明的进一步改进,当所述感应模块为红外感应器时,所述感应模块还包括感应探头,所述感应探头转动设置在所述红外感应器上,当所述感应探头未感应到细菌、害虫时,所述感应模块向所述主控模块发出信号,所述主控模块控制壳体移动,对下一个清扫区域进行杀菌、害虫处理。
18.作为本发明的进一步改进,当所述感应模块为光电传感器时,所述光电传感器的发送器用于发射光束,所述光电传感器的接收器用于接收反射或透射返回的光束,当所述接收器接收到的光束与发送器发射光束的强度不同时,则表示清扫区域中包含细菌、害虫,所述主控模块控制所述激光发生模块工作,当所述接收器接收到的光束与发送器发射光束的强度相同时,则表示清扫区域中不包含细菌、害虫或细菌、害虫已被消杀,所述主控模块控制所述激光发生模块停止工作。
19.作为本发明的进一步改进,利用光电容积脉搏波描记法判断清扫区域内是否有细菌、害虫时,根据细菌、害虫中体液透光率的脉动变化和对光的吸收变化判断是否有存活的细菌、害虫。
20.作为本发明的进一步改进,所述激光发生模块设有多个,且在主控模块控制下时刻保持同一焦点,当所述图像采集模块采集当前清扫区域的图像,计算细菌所在的位置后,所述主控模块控制多个激光发生模块的激光发生器均转向细菌、害虫的位置。
21.作为本发明的进一步改进,还包括位移传感器,所述位移传感器设置在所述壳体的底部,所述位移传感器用于检测所述壳体是否移动。
22.作为本发明的进一步改进,还包括红外反射探测器,所述红外反射探测器设置在所述壳体的侧面。
23.作为本发明的进一步改进,还包括蓄电池和充电接口,所述蓄电池设置在所述空腔内,所述充电接口设置在所述壳体上且与所述蓄电池电连接。
24.本发明的上述技术方案相比现有技术具有以下优点:
25.本发明的一种杀菌除虫扫地机器人通过感应模块感应到细菌、害虫后,通过感应模块感应到细菌、害虫后,通过图像采集模块采集清扫区域的图像,定位细菌、害虫位置,并将其转化为坐标信息,主控模块控制多个激光发生器集中照射细菌、害虫位置,进行集中杀菌、害虫,主控模块控制温度传感器进行测温,时间继电器用于控制激光发生器的工作时间,避免激光发生器工作时间过长而导致清扫区域温度升高过高,当感应模块感应不到细菌、害虫时,表示细菌、害虫已被消杀,感应模块向主控模块反馈信号,主控模块控制该杀菌、害虫扫地机器人对下一个清扫区域进行杀菌工作,通过时间继电器对激光发生器的工作时间进行限定,能够避免清扫区域温度升高过高的情况,使得该杀菌、害虫扫地机器人在
使用过程中不会对材料造成破坏,同时没有紫外灯管结垢后不便于清理的问题,从而提高了该杀菌除虫扫地机器人的实用性。
26.本发明的一种杀菌除虫扫地机器人中设置的各个部件之间相互配合,设置的反馈机制对信号进行转换、传输和反馈,每个部件再根据信号做出相应的反应,使得机器人不仅可以正常完成清扫工作,还可以精准的进行定点消杀细菌和害虫,采用红外或紫外激光进行定点照射杀灭害虫细菌,其杀菌除虫效率大大提高。
27.另外,本发明设置的反馈机制可以大大节省能源的消耗,只有在发现细菌和害虫的时候激光发射器才会开启进行杀菌除螨,当害虫死亡时激光发射器自动关闭,这也防止了红外或紫外光对清扫区域和人体产生危害。多光源的设置使得每个光源所需功率减小,减少机器人的负载,能够进行长时间的杀菌除虫,多光源之间的配合使得光源可以集束在同一位置进行照射,其杀菌除虫效果远远高于单光源,杀菌除虫所需时间也大大减少。监测反馈机制利用温度传感器和时间继电器来实时监测机体杀菌除虫的温度和时间,防止过高的温度对清扫区域材质和人体造成伤害。害虫死亡反馈机制的设置使得机体能够确保细菌、害虫的消杀,而且能够在杀死害虫后,关闭激光发射器并自动对其他位置进行扫描识别,可以减少能源的消耗,降低机体的负载,减少对光源部件的损耗。
附图说明
28.为了使本发明的内容更容易被清楚的理解,下面根据本发明的具体实施例并结合附图,对本发明作进一步详细的说明,其中:
29.图1是本发明优选实施例中杀菌、害虫扫地机器人的底部结构示意图;
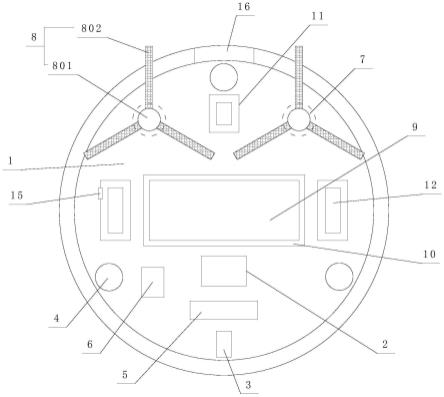
30.图2是本发明优选实施例中杀菌、害虫扫地机器人的顶部结构示意图;
31.图3是本发明优选实施例中机器人与市售机器人杀菌、除螨能力图;
32.图4是本发明优选实施例中杀菌除虫扫地机器人在杀菌、除虫时的流程图。
33.说明书附图标记说明:1、壳体;2、感应模块;3、图像采集模块;4、激光发生模块;5、温度传感器;6、无线通讯模块;7、第二驱动源;8、清扫刷;801、旋转轴;802、毛刷;9、清扫口;10、集尘箱;11、万向轮;12、驱动轮;13、盖板;14、显示屏;15、位移传感器;16、红外反射探测器;17、充电接口。
具体实施方式
34.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
35.需要说明的是,当元件被称为“设置于”、“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当元件被称为“固设于”另一个元件,或与另一个元件“固定连接”,它们之间可以是可拆卸固定方式也可以是不可拆卸的固定方式。当一个元件被认为是“连接”、“转动连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。所使用的术语“垂直的”、“水平的”、“左”、“右”、“上”、“下”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
36.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具
体的实施方式的目的,不是旨在约束本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
37.本发明中所述“第一”、“第二”、“第三”等类似用于不代表具体的数量及顺序,仅仅是用于名称的区分。
38.在一些实施例中,参照图1和图4所示,本发明的一种杀菌除虫扫地机器人,包括:
39.壳体1,所述壳体1内设有空腔;
40.感应模块2,所述感应模块2设置在所述壳体1的底部,所述感应模块2用于感应细菌、害虫,所述感应模块2可选择红外感应器或光电传感器;所述感应模块2具备反馈机制,当感应模块感应不到细菌和害虫时,表示细菌害虫已被消杀,感应模块将此信息反馈至主控模块,从而对其他清扫区域进行工作;
41.图像采集模块3,所述图像采集模块3设置在所述壳体1上,所述图像采集模块3用于采集清扫区域的图像,对清扫区域进行三维扫描,采集清扫区域图像,将感应到的害虫的位置转换为坐标数据(以机体的中心点为原点,x轴方向为机器人前进方向的垂直方向,y轴方向为机器人的前进方向,z轴方向为清扫区域的垂直方向,表示害虫在清扫区域的深度),坐标数据反馈给主控模块;
42.激光发生模块4,所述激光发生模块4包括激光发生器和第一驱动源,所述激光发生器设置在所述壳体1的底部,所述第一驱动源设置在所述空腔内且与所述激光发生器相连,三个激光发射器设置有旋转机构,并与主控制板连接,可以旋转360
°
相互配合,三束激光同时运作。主控模块控制调整三处激光发射器的方向和角度,使得发射器发射的三束光源集中于害虫的坐标位置进行照射并通过调节光源使得光准确集束在害虫所在深度;
43.温度传感器5,所述温度传感器5设置在所述壳体1的底部,所述温度传感器5用于监测清扫区域的温度;
44.时间继电器,所述时间继电器设置在所述空腔内,控制杀菌除虫的时间;
45.主控模块,所述主控模块设置在所述空腔内,所述感应模块2、所述图像采集模块3、所述激光发生模块4、所述温度传感器5和所述时间继电器均与所述主控模块连接;
46.其中,主控模块可采用微控制芯片模块、可程序化数字电路模块和嵌有操作系统的系统芯片模块等具备运算及控制功能的电子模块实现,用于收发控制指令并进行相应的计算。主控模块主要为单片机,其电性连接万向轮11、驱动轮12、各项传感器、时间继电器、感应模块、图像采集模块和激光发生器,主控模块通过分析各项传感器传送来的信息控制激光发生器运作的时常,判断是否停止激光发生器的运作,通过传感器搭配开关组件控制激光发生器开启或停止;
47.温度传感器5将清扫区域中的温度通过转换器转换为可输出信号(电流或电压信号)到主控模块的单片机进行处理分析,随后单片机将信号指令传送到时间继电器处,时间继电器即开始倒计时,计时完成后传送到主控模块中来控制机器人的运动,其工作原理以pt100为例,pt100是铂热电阻器,它的阻值随着温度的上升而呈近似匀速增长,pt100表示它在0℃时的阻值为100ω,100℃时的阻值为138.5ω,常见的感温元件有陶瓷元件、玻璃元件和云母元件;
48.图像采集模块3是高分辨率摄像头,对清扫区域进行三维扫描,可以采集清扫区域的图像,并传导至主控模块上进行处理分析,将感应模块2感应到的细菌、害虫位置转换为
坐标信息。
49.时间继电器位于空腔内,在主控模块中的处理器上,并与主控模块中的单片机相连接,是一种利用电磁原理或机械动作原理来延迟触头闭合或分断的自动控制电路,自吸引线圈得到信号起至触头动作中间有一段延时,当它接受了启动信号后开始计时,计时结束后它的工作触头进行开或合的动作,从而推动后续的电路工作,时间继电器的延时性能在设计的范围内是可以调节的,方便调整它的延时时间长短,通过设置延长时间,仅通过主控模块中的单片机处理并发送的信号触发,被触发后开始倒计时,倒计时结束后自动触发行动信号传送给主控模块,主控模块再控制机器人的运动。
50.当温度传感器5检测到的清扫区域的温度低于预设值时,所述主控模块控制所述时间继电器和所述感应模块2开始工作,当所述感应模块2检测到细菌时,所述图像采集模块3采集当前清扫区域的图像,计算细菌、害虫所在的位置,所述主控模块控制第一驱动源驱动激光发生器转动,使激光发生器照射至细菌、害虫所在位置,主控模块控制温度传感器5进行测温,时间继电器用于控制激光发生器的工作时间,避免激光发生器工作时间过长而导致清扫区域温度升高过高,当感应模块2感应不到细菌或害虫时,表示细菌害虫已被消杀,感应模块2将此信息反馈至主控模块,从而对其他清扫区域进行工作;
51.当所述感应模块2检测到细菌、害虫时,所述图像采集模块3采集此时的清扫区域的图像,所述主控模块以壳体1的中心点为原点,以壳体1的前进方向的垂直方向为x轴,以壳体1的前进方向为y轴,以清扫区域的垂直方向为z轴建立坐标系,得到细菌的坐标,所述主控模块控制第一驱动源驱动激光发生器转动,使激光发生器照射至细菌、害虫坐标处。
52.该杀菌、害虫扫地机器人在使用时,通过感应模块2感应清扫区域内的细菌、害虫,当感应到清扫区域内的细菌、害虫后,主控模块控制图像采集模块3工作,图像采集模块3采集此时清扫区域内的图像,并建立以壳体1的中心点为原点,以壳体1的前进方向的垂直方向为x轴,以壳体1的前进方向为y轴,以清扫区域的垂直方向为z轴的坐标系,通过三轴的坐标即可确定细菌、害虫的空间坐标点,将该空间坐标点反馈至主控模块,主控模块通过第一驱动源驱动几处激光发生器转动,使得几处激光发生器之间相互配合,集中朝向细菌、害虫所在的空间坐标处,从而对清扫区域内存在细菌的地方集中加热、升温,使得细菌、害虫内部的dna被破坏,从而实现杀菌、害虫效果;
53.通过时间继电器控制激光发生器的作用时长,从而对清扫区域内的加热时长以及最终需要达到的加热温度进行控制,避免过高的升温导致清扫区域内的材料被破坏的问题;
54.实施例一:
55.本实施例中的感应模块2为红外感应器,红外感应器可以感应到微小至70μm的细菌、害虫,其通过红外感应探头探测清扫区域内细菌、害虫的辐射,其探头可以转向任何一个方向覆盖整个清扫区域,其靠探测细菌、害虫发射的光线来进行工作,探头收集螨虫聚集在感应源上的辐射,当感应到细菌、害虫的辐射后,红外感应器的热释电元件向主控模块释放电荷,处理分析后得到检测的细菌、害虫位置,主控模块控制图像采集模块3工作,图像采集模块3进行三维扫描,通过数模转换器将采集到的的图像数据转换为电信号传输至主控模块处识别分析,从而将细菌所在的位置转换为坐标,以机器人的中心点为原点,x轴方向为机器人前进方向的垂直方向,y轴方向为机器人的前进方向,z轴方向为清扫区域的垂直
方向,表示害虫在清扫区域的深度,坐标的信息传送至主控模块,处理分析后加强激光发生器的功率,控制三处光源的照射方向和角度,使得三束激光集中于细菌、害虫的坐标位置进行照射,数秒钟内使得细菌、害虫所在位置处的温度快速提升,通过温度传感器5实时监测细菌、害虫所在位置处温度达到50℃以上,并通过时间继电器来控制除螨的时间来保证害虫彻底死亡,结束三光源集中照射模式;在未感应到细菌、害虫时,主控模块控制激光发生器自动降低功率的同时向周围扫描,减少能耗,当红外感应器没有感应到细菌、害虫的存在时,则表示细菌、害虫已被消杀,三束光源向四周发散照射,从而对其他清扫区域继续工作,本杀菌除虫模式通过图像识别和分析来确定清扫区域内是否存在细菌、害虫,且能够确定细菌、害虫的坐标,然后引导激光发生器11照射细菌、害虫所在的位置,在数秒钟内迅速达到杀菌、除虫的温度从而实现精确杀菌、除虫;
56.实施例二:
57.本实施例中的感应模块2为光电传感器,其采用光电容积脉搏波描记法来识别细菌、害虫,利用光的反射原理,根据细菌、害虫中的体液(如血液或淋巴液)的透光率的脉动变化,折算成电信号将信号反馈给主控模块,光电传感器内部的发送器发射光束射向清扫区域,光束通过透射或反射的方式被光电传感器内部的接收器接收,并转换为电信号,再经过数模转换器转换成数字信号,当光束射向细菌、害虫的时候,细菌、害虫内部的体液对光的吸收有所变化,使得光电传感器的接收器接收到的光强度有所变化,光电传感器再将其转化为电信号,经过数模转换器转换为数字信号反馈到主控模块,主控模块控制图像采集模块3采集清扫区域的图像,随后进行定位消杀,使得三束光源集中于细菌、害虫的坐标位置进行照射并通过调节光源使得光集束在细菌、害虫所在深度,其中当光源集束产生过高的温度时,被温度传感器5感应到,主控模块降低光源的功率,并且时间继电器可以控制杀菌除螨的时间,从而防止过高的温度对清扫区域产生损害;当光电传感器发射的光束在细菌的坐标处经过反射、透射后被接受的光强度不发生变化时,则表示细菌、害虫已被消杀,光电传感器将此信息反馈至主控模块,主控模块控制杀菌除虫扫地机器人移动后,对下一个清扫区域进行杀菌、害虫处理;
58.需要说明的是,激光发生模块4设有多个,且在主控模块控制下时刻保持同一焦点,激光发生器中的激光是从组成物质的原子中发射出来的,原子获得能量后处于不稳定状态,原子中的电子吸收能量后从低能级跃迁到高能级,再从高能级回落到低能级时,所释放的能量以光子的形式放出,被激发出来的光子束(激光)中的光子光学特性高度一致,本发明中的多个激光发生器均连接有旋转机构,并与主控模块连接,使得激光发生器可以旋转360
°
,通过多个低功耗的激光发生器对细菌、害虫坐标处进行快速升温,能够在未发现细菌、害虫时降低功耗,同时,在发现细菌、害虫后能够保证快速而高效消杀,另一方面,通过采用低功耗的激光发生器,能够在未发现细菌、害虫时防止其对清扫区域以及人体造成伤害,通过采用多个激光发生模块4能够扩大激光发生的范围,同时,采用多光源集束照射细菌、害虫进行消杀,具有高效性,降低单个光源的功率,而且光源只在发现细菌、害虫时开启进行杀菌除虫,可以减少能源的消耗,降低机体的负载,减少对光源部件的损耗。
59.在其中一实施例中,计算细菌、害虫所在的位置时,建立坐标系获得设置在所述图像采集模块3采集范围内的参照物的坐标,当所述感应模块2检测到细菌、害虫时,所述图像采集模块3采集清扫区域的图像,根据采集到的清扫区域的图像中参照物的位置与细菌的
位置进行对比,计算得到细菌、害虫所在的坐标。
60.通过设置参照物进行对比,能够得到更精确的细菌、害虫坐标参数。
61.在其中一实施例中,参照图1所示,还包括:
62.第二驱动源7,所述第二驱动源7设置在所述空腔内;
63.两个清扫刷8,所述清扫刷8设置在所述壳体1的底部,所述第二驱动源7与所述清扫刷8相连;
64.清扫口9和集尘箱10,所述集尘箱10设置在所述空腔内,所述清扫口9设置在所述壳体1的底部且与所述集尘箱10连通,两个清扫刷8分别设置在所述清扫口9的两侧,两个清扫刷8的转动方向相反以使灰尘向清扫口9移动;
65.负压装置,所述负压装置设置在所述集尘箱10内。
66.通过设置两个清扫刷8且相互反向的转动,能够将灰尘扫向清扫口9,使得灰尘在负压装置的作用下经过清扫口9进入集尘箱10内。
67.在其中一实施例中,参照图1所示,还包括:
68.万向轮11,所述万向轮11设置在所述壳体1底部的中心处;
69.两个驱动轮12,所述驱动轮12设置在所述壳体1底部,两个驱动轮12分别位于所述清扫口9的两侧。
70.驱动轮12及驱动电机主要用来保证机器人的移动,万向轮11位于壳体1的前端,驱动轮12位于壳体1底部的两侧,万向轮可以转动360
°
,主控模块控制机器人转向时,万向轮11可以移动来避免机器人碰到障碍物,当前清扫区域清扫完毕后,壳体1需要移动至下一个清扫区域处,驱动轮12驱动壳体1移动,通过万向轮11调节壳体1的朝向,从而实现360
°
的转向动作,进一步提高了该杀菌、害虫扫地机器人的工作效率。
71.在其中一实施例中,参照图2所示,所述壳体1的顶部还设有通孔,所述通孔内铰接有盖板13,所述通孔与所述集尘箱10连通。
72.通过设置盖板13能够便于倾倒集尘箱10内的灰尘垃圾,从而进一步提高使用便捷性;
73.优选的,参照图2所示,在盖板13上设置一按钮,通过按钮的按动来控制盖板13的开启,从而能够进一步提高盖板13使用的便捷性。
74.在其中一实施例中,参照图1所示,所述清扫刷8包括:
75.旋转轴801,所述旋转轴801与所述第二驱动源7的输出端连接,所述第二驱动源7驱动所述旋转轴801转动;
76.多组毛刷802,多组毛刷802围绕所述旋转轴801的中心线等角度分布。
77.通过设置等角度分布的多组毛刷802,使得灰尘被第一组毛刷802扬起后,能够被第二组毛刷802带动至清扫口9,从而提高了集尘率。
78.在其中一实施例中,参照图2所示,还包括显示屏14,所述显示屏14设置在所述壳体1的顶部,所述显示屏14与所述主控模块信号连接。
79.通过显示屏14显示各项数据,能够便于用户在使用过程中得知各项信息,例如电量、当前运动状态、当前清扫区域的温度和无线连接状况。
80.在其中一实施例中,参照图1所示,还包括位移传感器15,所述位移传感器15设置在所述壳体1的底部,所述位移传感器15用于检测所述壳体1是否移动。
81.通过设置位移传感器15判断壳体1是否存在较大的高度上的位移或检测驱动轮12的位置变化,以此判断该杀菌除虫扫地机器人是否被拿起,当位移传感器15检测到杀菌、害虫扫地机器人被拿起时,将信息反馈至主控模块,主控模块控制激光发生器停止工作,避免对人体造成伤害。
82.在其中一实施例中,参照图1和图2所示,还包括红外反射探测器16,所述红外反射探测器16设置在所述壳体1的侧面。
83.红外反射探测器16设置在壳体1的最前面,与主控模块中的单片机连接,主要用来躲避障碍物,通过设置在侧面的红外反射探测器16的发光管发射红外信号,红外信号遇到障碍物后反射,根据反射回来的信号强度来判断壳体1与障碍物之间的距离,从而便于控制壳体1的移动方向,红外反射探测器16的接收管接收的光强随障碍物的距离的变化而变化。
84.在其中一实施例中,参照图2所示,还包括蓄电池和充电接口17,所述蓄电池设置在所述空腔内,所述充电接口17设置在所述壳体1上且与所述蓄电池电连接。
85.通过设置蓄电池增加续航的同时,通过充电接口17保证该杀菌、害虫扫地机器人的耐用性,从而进一步提高了该杀菌、害虫扫地机器人的实用性。
86.在其中一实施例中,参照图1所示,还包括无线通讯模块6,所述无线通讯模块6用于连接移动终端。
87.通过无线通讯模块6连接移动终端,使得用户能够通过移动终端操控命令机器人的启动,同时,用户也可以随意控制扫地机器人的运动路径,从而实现远距离操控。
88.实施例三:
89.参照图3所示,对比其他传统扫地机器人采取的杀菌除螨方式,本发明所采取的扫描式识别定位来进行定点消杀细菌和螨虫的这种方式可以带来优异的效果。
90.下表1为5种现有机器人与本发明杀菌率与除螨率的对比。控制工作时间相同:1个小时,在大小为10平米的范围内工作,将所测得的杀菌率与除螨率进行分析对比:
91.表1.现有机器人与本发明杀菌率与除螨率的对比表
92.名称单位时间内除螨率(%)单位时间内杀菌率(%)机器人17080机器人23050机器人34080机器人42060机器人5030本发明9998
93.具体测量方式:
94.(1)除螨率测试
95.将相同数量试验用螨虫分别均匀分散到每个机器人的试验载体上,试验载体可选用面积为10平方米的地毯,然后启动每个机器人对所在试验区域进行杀菌除螨工作,工作相同时间(1h)后,对试验区域内的活螨虫和死螨虫进行计数,在光学显微镜下观察尘螨的活动情况,以终不活动为灭活认定,计算除螨率:
96.除螨率=(试验尘螨数-存活尘螨数)/试验尘螨数
×
100%
97.(2)杀菌率测试
98.对上述每个机器人杀菌除螨后的实验区域和没经过机器人杀菌除螨的原样进行采样,采样方法是用5cm
×
5cm的标准灭菌规格板,放在试验区域表面,采样面积≥100cm2,在规格板内横竖往返均匀涂擦各5次,并随之转棉拭子,剪去手接触部位后,将棉拭子投入10ml含相应中和剂的无菌洗脱液试管内,立即送检。细菌总数检测方法:将采样管在混匀器上振荡20s或用力振打80次,用无菌吸管吸取待检样品接种于灭菌平皿,每一样本接种2个平皿,内加入已溶化的45℃~48℃的营养琼脂15ml~18ml,边倾注边摇匀,待琼脂凝固,置36℃
±
1℃温箱培养48h,计数菌落数,并根据公式计算每个机器人的杀菌率。
99.细菌总数(cfu/cm2)=(平板上菌落数
×
稀释倍数)/采样面积
100.杀菌率=(原样细菌总数-杀菌后细菌总数)/原样细菌总数
×
100%。下表2为5种现有机器人与本发明优缺点的对比:
101.表2.现有机器人与本发明优缺点的对比表
102.103.104.105.[0106][0107]
普通杀菌除螨的扫地机器人采取大范围杀菌除螨,不具备识别性和精准清除性,光源需要一直打开进行杀菌除螨,因此不能长时间的进行杀菌除螨工作,否则会损害机体,还存在伤害清扫区域材质和人体健康的可能性。普通杀菌除螨的扫地机器人采取单光源进行杀菌除螨,所需要的功率过大,对机器人的负载过大,对机器人的配置要求高,另外,单光源杀菌除螨所需时间过长,导致杀菌除螨效率下降,不能全面的进行杀菌除螨。普通杀菌除螨的扫地机器人不具备监测反馈机制,无法实时监测杀菌除螨的温度和时间,红外/紫外光和高温可能会对清扫区域材质和人体产生伤害。且普通杀菌除螨的扫地机器人不具备细菌螨虫死亡后的反馈机制,无法确保细菌和螨虫的死亡,而且会导致细菌螨虫已被杀死,但机体还在进行杀菌除螨工作,浪费能源的消耗,另外上时间工作会导致光源部件的损耗,减少机体部件的寿命。普通的光源杀菌除螨机器人对光源的利用不够充分,仅在扫地机器人内部配备紫外光,但并无其他部件与之的配合。市场上现有的扫地机器人杀菌率大约在30%-80%左右,除螨率为0-70%,只有少数可达70%。
[0108]
而本发明采用红外感应器或光电传感器来识别螨虫,具备特异识别性,可以准确识别螨虫的位置;采用高分辨率摄像头来捕捉定位螨虫的位置,具有精准特效性;采用多光源集束照射螨虫进行消杀,具有高效性,降低每个光源的功率,而且光源只在发现螨虫时开启进行除螨,可以减少能源的消耗,降低机体的负载,减少对光源部件的损耗;采用监测反馈机制利用温度传感器和时间继电器来实时监测机体杀菌除螨的温度和时间,防止过高的温度对清扫区域材质和人体造成伤害;采用螨虫死亡反馈机制的设置使得机体能够确保细菌螨虫的消杀,而且能够在杀死螨虫后,关闭激光发射器并自动对其他位置进行扫描识别螨虫,可以减少能源的消耗,减少对光源部件的损耗。而本发明的机器人杀菌率和除螨率高达99%,几乎可以杀死全部细菌及螨虫,与定点杀菌相结合,在减少能源消耗的同时,使得杀菌率达到最大值。
[0109]
显然,上述实施例仅仅是为清楚地说明所作的举例,并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
