技术特征:
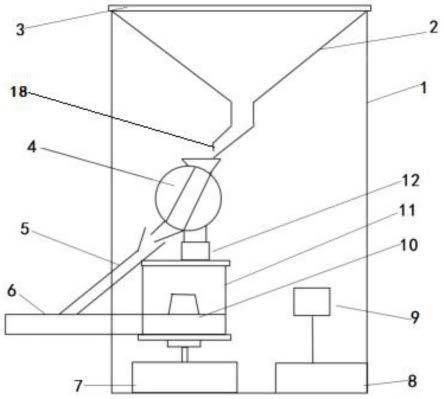
1.一种室内养殖池塘智能投喂装置,其特征在于,包括:机架及设置在所述机架内部的料斗、下料称重装置、抛料装置及控制模块,所述机架的内顶部设置所述料斗,所述料斗的顶部设置有料斗顶盖,所述料斗的底部设置有料斗仓门,所述料斗仓门连接所述下料称重装置,所述下料称重装置连接所述抛料装置,所述下料称重装置及抛料装置电性连接所述控制模块;所述下料称重装置包括下料装置、下料管及称重传感器,所述下料装置的顶部设置有下料装置入口,所述下料装置的内部对应所述下料装置入口设置有可旋转储料槽模块,所述可旋转储料槽模块用于存储饵料及将存储的饵料倾出,所述下料装置的一侧开设有豁口,所述下料管倾斜设置在所述抛料装置的顶部与所述下料装置的一侧之间,所述下料装置的豁口连接所述下料管的进口,所述下料管的出口连接所述抛料装置,所述下料装置的底部设置所述称重传感器,所述称重传感器电性连接所述控制模块;所述抛料装置包括鼓风机、步进电机、出料管及风机外壳,所述机架的内底部固定设置所述步进电机,所述步进电机的输出端固定设置所述鼓风机,所述鼓风机的外侧罩设所述风机壳体,所述风机壳体的一侧连接所述出料管的一端,所述机架的一侧对应所述出料管及下料管开设有环形槽,所述出料管的另一端穿过所述环形槽设置在所述机架的外侧,所述出料管上设置有出料管进口,所述出料管进口连接所述下料管的出口,所述风机壳体的顶部固定设置所述称重传感器,所述鼓风机及步进电机电性连接所述控制模块。2.根据权利要求1所述的室内养殖池塘智能投喂装置,其特征在于,所述料斗仓门上设置有第一伺服电机,所述第一伺服电机驱动连接所述料斗仓门,用于驱动所述料斗仓门开启或者关闭,所述第一伺服电机电性连接所述控制模块。3.根据权利要求2所述的室内养殖池塘智能投喂装置,其特征在于,所述可旋转储料槽模块包括储料槽及第二伺服电机,正对所述下料装置入口的所述下料装置的内部可旋转设置所述储料槽,所述第二伺服电机驱动连接所述储料槽,用于驱动所述储料槽旋转,将存储的饵料倾出。4.根据权利要求3所述的室内养殖池塘智能投喂装置,其特征在于,所述控制模块包括stm32控制器、模拟量变送器、继电器、4g dtu模块及开关电源,所述开关电源用于给各部件供电,所述stm32控制器通过继电器连接所述鼓风机,所述stm32控制器电性连接所述步进电机、第一伺服电机及第二伺服电机,所述称重传感器通过模拟量变送器连接所述stm32控制器,所述stm32控制器通过4g dtu模块连接移动端。5.一种室内养殖池塘智能投喂方法,应用于权利要求1-4任一所述的室内养殖池塘智能投喂装置,其特征在于,包括如下步骤:步骤1:根据不同饵料的半径、体积及重量,在室内无风状态下,建立力学模型,根据力学模型建立饵料喷离出料管初速度、出料管与池塘水面高度、饵料落点位置关系模型;步骤2:利用力学模型及位置关系模型进行试验,获得不同饵料与落点距离及扇形区域关系,并对力学模型及位置关系模型进行修正;步骤3:利用风速仪计算鼓风机不同转速下的风速,根据修正后的力学模型及位置关系模型,获得不同重量、半径下鼓风机转速与饵料喷离出料管初速度间关系;步骤4:整合各个关系模型,获得以饵料半径、重量、需抛射的距离、需抛射的扇面弧度范围、投饵机与池塘高度差为输入量,鼓风机转速、步进电机旋转角度为输出的最终关系模
型,并将其嵌入stm32控制器,使得在人机交互界面中,根据实际需求对输入量进行设置,stm32控制器根据输入量利用最终关系模型计算输出量,并控制鼓风机及步进电机按照输出量运行,实现饵料抛投的精准控制。
技术总结
本发明提供了一种室内养殖池塘智能投喂装置及方法,该装置包括:机架及设置在所述机架内部的料斗、下料称重装置、抛料装置及控制模块,所述机架的内顶部设置所述料斗,所述料斗的顶部设置有料斗顶盖,所述料斗的底部设置有料斗仓门,所述料斗仓门连接所述下料称重装置,所述下料称重装置连接所述抛料装置,所述下料称重装置及抛料装置电性连接所述控制模块。本发明提供的室内养殖池塘智能投喂装置及方法,结构简单,便于实现,能够精准控制投喂距离及范围,加大了饵料抛撒面积,改善了饵料抛撒均匀性的问题,能够对饵料进行准确称重,减轻了饵料的浪费。轻了饵料的浪费。轻了饵料的浪费。
技术研发人员:郝建军 郭冉 张叶梅 夏辉 孙磊 耿硕彪 靳道祥 刘天龙
受保护的技术使用者:河北农业大学
技术研发日:2022.06.18
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。