1.本技术涉及压电驱动装置技术领域,特别涉及一种尺蠖式压电驱动器。
背景技术:
2.尺蠖式压电驱动器以其具有小体积、大推力、高精度、大行程、快速响应及高可靠性等性能优势,被广泛应用于诸多领域,相对于其他类型的压电驱动器具有不可替代的优越性。
3.但现有的小体积尺蠖式压电驱动器,输出推力及掉电保持力均不高,而驱动力大的尺蠖式驱动器外形体积又较大,无法满足小体积的空间需求。
技术实现要素:
4.本技术的目的是提供一种尺蠖式压电驱动器,能够在小体积范围内实现大推力及大掉电保持力。
5.为实现上述目的,本技术提供如下技术方案:
6.一种尺蠖式压电驱动器,包括:左钳位单元、右钳位单元、预紧单元和驱动单元,所述左钳位单元和所述右钳位单元位于所述预紧单元内,所述预紧单元用于对所述左钳位单元和所述右钳位单元施加预紧力,所述驱动单元分别与所述左钳位单元和所述右钳位单元连接,所述左钳位单元、所述驱动单元和所述右钳位单元在时序控制下可在所述预紧单元内左右运动,所述左钳位单元、所述驱动单元和所述右钳位单元的伸缩方向与其运动方向相同。
7.优选地,所述驱动单元包括驱动压电叠堆,所述预紧单元包括柔性预紧外壳,所述左钳位单元包括左摩擦块、多个左压电叠堆,所述右钳位单元包括右摩擦块、多个右压电叠堆,所述左摩擦块和所述右摩擦块位于所述柔性预紧外壳内,所述柔性预紧外壳用于对所述左摩擦块和所述右摩擦块施加预紧力;所述驱动压电叠堆、所述左压电叠堆和所述右压电叠堆在上电状态下可产生伸长运动,其伸长方向与所述柔性预紧外壳的轴向方向相同。
8.优选地,所述驱动单元还包括柔性预紧拉簧和预紧补偿环,所述柔性预紧拉簧的两端分别与左摩擦块和所述右摩擦块连接,所述驱动压电叠堆的两端分别设有一个所述预紧补偿环,所述预紧补偿环用于通过调整其轴向尺寸,以调整所述驱动压电叠堆的预紧力。
9.优选地,所述预紧单元还包括预紧压块和预紧螺钉,所述预紧压块位于所述柔性预紧外壳的内侧,所述预紧螺钉螺纹连接在所述柔性预紧外壳的侧壁上,所述预紧螺钉用于控制所述预紧压块移动,以调整所述预紧单元对所述左钳位单元和所述右钳位单元的预紧力。
10.优选地,所述柔性预紧外壳包括两个分别位于所述预紧压块两侧的柔性铰链。
11.优选地,所述预紧单元还包括预紧耐磨陶瓷片,所述预紧压块上与所述左钳位单元和所述右钳位单元相对的一面设有所述预紧耐磨陶瓷片,所述柔性预紧外壳内与所述预紧压块上相对的一面设有所述预紧耐磨陶瓷片。
12.优选地,所述左摩擦块和所述右摩擦块的外侧分别设有与所述预紧耐磨陶瓷片相对应的钳位耐磨陶瓷片。
13.优选地,所述左摩擦块和所述右摩擦块分别为柔性整体式摩擦块。
14.与现有技术相比,上述技术方案具有以下优点:
15.本技术所提供的一种尺蠖式压电驱动器,包括:左钳位单元、右钳位单元、预紧单元和驱动单元,左钳位单元和右钳位单元位于预紧单元内,预紧单元用于对左钳位单元和右钳位单元施加预紧力,驱动单元分别与左钳位单元和右钳位单元连接,左钳位单元、驱动单元和右钳位单元在时序控制下可在预紧单元内左右运动,左钳位单元、驱动单元和右钳位单元的伸缩方向与其运动方向相同,可以在小体积范围内实现较大的推力,同时压电驱动器在掉电状态下,通过预紧单元可以对左钳位单元和右钳位单元提供较大的钳位摩擦力。
附图说明
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
17.图1为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的结构原理示意图;
18.图2为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的x向剖视结构示意图;
19.图3为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的z向剖视结构示意图;
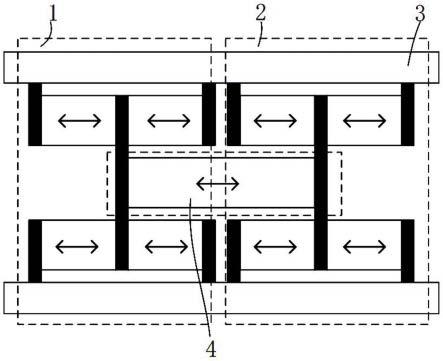
20.图4为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的内部结构示意图;
21.图5为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的柔性预紧外壳的结构示意图;
22.图6为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的左钳位单元的结构示意图。
具体实施方式
23.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
24.请参考图1~图6,图1为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的结构原理示意图;图2为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的x向剖视结构示意图;图3为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的z向剖视结构示意图;图4为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的内部
结构示意图;图5为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的柔性预紧外壳的结构示意图;图6为本技术一种具体实施方式所提供的一种尺蠖式压电驱动器的左钳位单元的结构示意图。
25.本技术实施例所提供的一种尺蠖式压电驱动器,包括:左钳位单元1、右钳位单元2、预紧单元3和驱动单元4,左钳位单元1和右钳位单元2位于预紧单元3内,预紧单元3用于对左钳位单元1和右钳位单元2施加预紧力,驱动单元3分别与左钳位单元1和右钳位单元2连接,左钳位单元1、驱动单元4和右钳位单元2在时序控制下可在预紧单元3内左右运动,左钳位单元1、驱动单元4和右钳位单元2的伸缩方向与其运动方向相同。其中驱动单元4包括驱动压电叠堆16;预紧单元3包括柔性预紧外壳7;左钳位单元1和右钳位单元2分别包括摩擦块8和多个钳位压电叠堆15,分别记为左摩擦块、左压电叠堆、右摩擦块、右压电叠堆,例如可以在左摩擦块的径向两侧分别设置两个左压电叠堆,右摩擦块的径向两侧分别设置两个右压电叠堆,左摩擦块和右摩擦块优选为柔性整体式摩擦块,分别包括四组平行铰链8a、8b、8c、8d,平行铰链的设置位置与压电叠堆位于相应摩擦块的不同侧部;左摩擦块和右摩擦块位于柔性预紧外壳7内,柔性预紧外壳7可以对左摩擦块和右摩擦块施加预紧力,柔性预紧外壳7的两端设有端盖5,端盖5可以对左钳位单元1和右钳位单元2起到限位作用;左钳位单元1、右钳位单元2和驱动单元4结构上为一整体,在时序控制下可沿柔性预紧外壳7的轴向左右移动;驱动压电叠堆16、左压电叠堆和右压电叠堆在上电状态下可产生伸长运动,其伸长方向与柔性预紧外壳7的轴向方向相同,即各压电叠堆的伸长方向与压电驱动器的运动方向相同,压电驱动器最大输出力取决于压电叠堆伸长时产生的推力,可以在小体积范围内实现较大的推力,同时压电驱动器在掉电状态下,通过柔性预紧外壳7可以对左钳位单元1和右钳位单元2提供较大的钳位摩擦力,适合在光刻投影物镜等对体积及可靠性要求较高的场景中应用。
26.在一些实施例中,如图4所示,驱动单元4还包括柔性预紧拉簧11和预紧补偿环9,柔性预紧拉簧11的两端分别与左摩擦块和右摩擦块连接,例如可以通过螺栓14进行连接,驱动压电叠堆16的两端分别设有一个预紧补偿环9,预紧补偿环9用于通过调整其轴向尺寸,以调整驱动压电叠堆16的预紧力。
27.下面对尺蠖式压电驱动器的运动原理进行说明:
28.尺蠖式压电驱动器向右运动时:
29.先让左钳位单元1断电,此时左钳位单元1与预紧单元3间通过静摩擦力保持相对位置不变;
30.右钳位单元2上电,在控制系统作用下右钳位单元2内的左压电叠堆相向往复运动,此时右钳位单元2与预紧单元3间产生一组大小相等方向相反的滑动摩擦力;
31.驱动单元4上电,此时由于驱动单元4左侧摩擦力大于右侧的摩擦力,驱动单元4内的驱动压电叠堆在控制系统作用下带动右钳位单元2向右运动一步;
32.右钳位单元2断电、左钳位单元1上电,在控制系统作用下左钳位单元1内的左压电叠堆相向往复运动,此时左钳位单元1与预紧单元3间产生一组大小相等方向的滑动摩擦力;
33.驱动单元4断电,在柔性预紧拉簧11作用下带动左钳位单元1向右运动一步;重复上述过程可实现压电驱动器向右的连续步进运动。
34.尺蠖式压电驱动器向左运动时:
35.先让右钳位单元1断电,此时右钳位单元2与预紧单元3间通过静摩擦力保持相对位置不变;
36.左钳位单元1上电,在控制系统作用下左钳位单元1内的左压电叠堆相向往复运动,此时左钳位单元1与预紧单元3间产生一组大小相等方向相反的滑动摩擦力;
37.驱动单元4上电,此时由于驱动单元4右侧摩擦力大于左侧的摩擦力,驱动单元4内的驱动压电叠堆在控制系统作用下带动左钳位单元1向左运动一步;
38.左钳位单元1断电、右钳位单元2上电,在控制系统作用下右钳位单元2内的右压电叠堆相向往复运动,此时右钳位单元1与预紧单元3间产生一组大小相等方向的滑动摩擦力;
39.驱动单元4断电,在柔性预紧拉簧11作用下带动右钳位单元2向左运动一步;重复上述过程可实现压电驱动器向左的连续步进运动。
40.尺蠖式压电驱动器静态时,在预紧力fn作用下,在钳位单元与外壳的接触面上会产生摩擦力f,驱动单元左右两侧产生的摩擦力分别为f
l
=fr=f
max
=0.5μfn41.其中,f
l
为作用于左钳位单元1的静摩擦力,fr为作用于右钳位单元2的静摩擦力,μ为摩擦因数;则尺蠖式压电驱动器掉电保持力为f
hold
=f
l
fr=2f
max
42.尺蠖式压电驱动器运动时,其能够产生的最大输出力f
max
=f
p
,f
p
为驱动单元4能够产生的推力。
43.在一些实施例中,如图5所示,预紧单元3还包括预紧压块6和预紧螺钉10,预紧压块6位于柔性预紧外壳7的内侧,预紧螺钉10螺纹连接在柔性预紧外壳7的侧壁上,例如可以在柔性预紧外壳7的内顶部设置用于放置预紧压块6的凹槽,预紧螺钉10连接在柔性预紧外壳7的顶部,其中柔性预紧外壳7的内顶部和内底部均优选为平面,相应地左摩擦块和右摩擦块的上下面也为平面,预紧压块6的结构优选为沿柔性预紧外壳7的轴向延伸的板块状结构,预紧螺钉10的个数也优选为多个。通过旋拧预紧螺钉10,可以控制预紧压块6移动,以调整预紧单元3对左钳位单元和右钳位单元的预紧力。其中,柔性预紧外壳7包括两个分别位于预紧压块6两侧的柔性铰链7a、7b,在调节预紧螺钉10的作用下柔性铰链产生变形,进而产生z-向的正压力,在左钳位单元1、右钳位单元2和预紧单元3间产生摩擦力。
44.进一步地,如图6所示,预紧单元3还包括预紧耐磨陶瓷片12,预紧压块6上与左钳位单元1和右钳位单元2相对的一面设有预紧耐磨陶瓷片12,柔性预紧外壳7内与预紧压块6上相对的一面也设有预紧耐磨陶瓷片12,可以通过粘贴的方式来固定预紧耐磨陶瓷片12。左摩擦块和右摩擦块的外侧分别设有与预紧耐磨陶瓷片12相对应的钳位耐磨陶瓷片13,也可以通过粘贴的方式来固定钳位耐磨陶瓷片13。通过预紧耐磨陶瓷片12和钳位耐磨陶瓷片13可以减少左摩擦块、右摩擦块和柔性预紧外壳7之间的磨损。
45.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
46.以上对本技术所提供的一种尺蠖式压电驱动器进行了详细介绍。本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利
要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。