1.本发明属于医疗设备技术领域,涉及医学检验新设备技术领域,具体涉及一种骨科微创手术用机械臂。
背景技术:
2.关节镜手术是骨科微创手术的一种,是将具有照明装置的透镜金属管通过很小的切口插入关节腔内,并在监视器上将关节腔的内部结构放大,观察关节腔内的病变情况及部位,同时在电视监视下进行全面检查和清理病损部位;同时具有诊断和治疗两种功能。
3.关节镜手术包括肩关节镜手术、肘关节镜手术、髋关节镜手术、膝关节镜手术和踝关节镜手术等。由于肩关节解剖结构特殊,肩关节炎、肱二头肌断裂、骨关节炎等患者在进行肩关节镜手术时,通常需采用侧卧位,为获得良好的手术视野及方便手术操作,常需要使用上肢牵引设备来维持患肢外展设计要求。现有的上肢牵引设备使用绳子连接配重的方式对上肢进行牵引固定,这种固定方式不够稳定,配重也只能使用有限的几个重量;而且现有的上肢牵引设备使用一根竖直的立柱连接在手术台上作为支撑,其支撑结构也不够稳固,进行手术时上肢容易产生晃动,有碍手术顺利进行。
技术实现要素:
4.本发明的目的在于提供一种可稳定牵引上肢的骨科微创手术用机械臂。
5.基于上述目的,本发明采用如下技术方案:一种骨科微创手术用机械臂,包括与手术台相配合的手术调节机械臂,手术调节机械臂包括支撑装置,支撑装置上连接有患肢调节装置,患肢调节装置上连接有患肢固定装置;患肢固定装置包括固定杆,还包括与固定杆相配合的防护袖套。
6.进一步的,支撑装置包括主支撑臂,主支撑臂上设置有与手术台相配合的主固定连接座;主支撑臂设置有转动连接座,转动连接座设置在主固定连接座的上方;转动连接座上连接有辅助支撑臂,辅助支撑臂下部设置有与手术台相配合的副固定连接座;患肢调节装置与主支撑臂连接。
7.进一步的,患肢调节装置包括在主支撑臂上转动连接的上调节臂,上调节臂与主支撑臂垂直,上调节臂设置在转动连接座的上方;上调节臂下方设置有与其平行的下调节臂,下调节臂与主支撑臂转动连接;上调节臂和下调节臂上连接有弧形的竖直角度调节臂;竖直角度调节臂上连接有固定杆,固定杆所在的直线经过竖直角度调节臂的圆心。
8.进一步的,转动连接座包括与主支撑臂连接的水平铰接件,水平铰接件与主支撑臂在水平方向上转动连接;第一铰接件上铰接有竖直铰接件,竖直铰接件与水平铰接件在竖直方向上转动连接;水平铰接件上设置有外突形的弧形连接公端,竖直铰接件上设置有与弧形连接公端同轴的弧形连接母端;竖直铰接件远离水平铰接件的一端与辅助支撑臂固连,辅助支撑臂与副固定连接座转动连接,辅助支撑臂长短可调。
9.进一步的,主支撑臂包括与患肢调节装置和辅助支撑臂连接的上支撑段,还包括
与主固定连接座连接的下支撑段;下支撑段的顶端为水平的支撑调节杆,上支撑段的底端是与支撑调节杆连接的移动调节杆,移动调节杆为水平设置,支撑调节杆和移动调节杆上设置有锁定机构;下支撑段的底端和主固定连接座转动连接;上支撑段的竖直部分长度可调。
10.进一步的,固定杆一端是与防护袖套相连的患肢连接端,另一端为施力端;防护袖套上连接有绑带,施力端连接有拉力计。
11.进一步的,固定杆内设置有与其平行的定位杆;定位杆位于固定杆外的一端设置有定位头,另一端设置有限位滑块;定位杆与固定杆延长度方向的中心线重合;固定杆内开设有与限位滑块连接的滑动通道,患肢连接端开设有与滑动通道连通的限位孔;定位杆上转动连接有螺纹套,螺纹套与定位杆轴向固定设置,螺纹套与患肢连接端螺接。
12.进一步的,竖直角度调节臂上连接有滑动座,滑动座上设置有与竖直角度调节臂相配合的固定器;滑动座与固定杆沿固定杆的长度方向滑动连接;滑动座上转动连接有调节螺母,拉力计上固连有丝杆,丝杆与调节螺母螺接。
13.进一步的,竖直角度调节臂上均布有限位齿,固定器包括与限位齿啮合连接的齿条,齿条上固连有滑动杆,滑动杆远离齿条的一端固连有锁定手柄,滑动杆上套设有压簧;压簧设置在滑动座内。
14.进一步的,滑动座包括与竖直角度调节臂滑动连接的弧形滑槽;滑动座上开设有与固定杆滑动连接的径向限位孔;滑动座包括与压簧固连的限位板,压簧设置在限位板与齿条之间。
15.与现有技术相比,本发明具有如下有益效果:1、与使用绳子和配重拉紧患肢相比,使用固定杆和防护袖套配合固定患肢更加稳定,不会因为配重晃动导致患肢产生较大的晃动,有利于肩关节镜手术稳定进行。支撑装置设置主支撑臂和辅助支撑臂,两个支撑臂和手术床配合可形成三角形结构,使患肢调节装置更加稳定,避免主支撑臂晃动影响手术进行。
16.2、在竖直角度调节臂上设置固定杆,使固定杆可沿着竖直角度调节臂转动,使患肢在竖直方向的张开角度可调。将设置在上调节臂和下调节臂上,将上调节臂和下调节臂均设置为可绕主支撑臂转动,使竖直角度调节臂与固定杆可带动患肢沿着水平方向转动,方便调节患肢的位置以适应手术。固定杆所在直线经过竖直角度调节臂的圆心,使固定杆绕竖直角度调节臂做圆周转动,使固定杆与手臂绕肩关节的转动能够重合,进而能够带动手臂(患肢)稳定转动。
17.3、转动连接座的水平铰接件使辅助支撑臂能够绕主支撑臂进行水平转动,竖直铰接件使辅助支撑臂能够绕主支撑臂进行竖直转动,方便调节辅助支撑臂与手术台连接的位置,选择合适的位置支撑可提高支撑的稳定性。弧形连接公端和弧形连接母端配合可增大接触面积,使水平铰链和竖直铰链的连接更稳定。
18.4、将主支撑臂分为上下两部分,并设置水平的支撑调节杆和移动调节杆,使上支撑段可伸长、缩短、绕主固定连接座旋转,上支撑臂与上调节臂和下调节臂配合可方便调节竖直角度调节臂和固定杆的位置与角度,可快速调节固定杆和患肢的相对位置,提高患肢固定的效率。
19.5、定位杆为固定杆的延长杆,将定位杆拉出固定杆后,定位头的位置为竖直角度
调节臂的圆心位置,将定位头调节到与肩关节重合即可固定患肢调节装置和患肢,定位头可快速调节固定杆的位置;限位孔和限位滑块配合可防止定位杆移出固定杆,螺纹套与患肢连接端螺接并与螺纹杆轴向固定,可在收起定位杆后将定位杆与固定杆连接,使固定杆稳定工作。
20.6、使用拉力计可在患肢绑到固定杆后对患肢施加拉力,滑动座与固定器配合可带动固定杆在竖直角度调节臂上滑动并将其固定在合适的位置;调节螺母可驱动丝杆移动,进而带动拉力计移动,对患肢施加拉力;拉力计与连杆配合能够在手术过程中稳定将患肢固定,可避免采用配重方式所产生的晃动;同时使用调节螺母与丝杆带动拉力计可调节出不同拉力值,不被配重的特定重量所限定。
21.7、固定器设置齿条和压簧,可对齿条持续施加弹力,将齿条压在限位齿上,使滑动座与竖直角度调节臂固连;滑动座的弧形滑槽可限制滑动座的位置,与齿条配合可实现快速固定;径向限位孔与拉力计配合可限制固定杆的位置,使固定杆在竖直角度调节臂上保持稳定。
22.综上所述,本发明能够在肩关节镜手术过程中使患肢的固定更加稳定,并且可对患肢提供合适的拉力值,使肩关节镜手术能够更加顺利的进行。
附图说明
23.图1为本发明实施例1的示意图;图2为本发明实施例1的锁定机构示意图;图3为图2的局部放大图;图4为本发明实施例1的转动连接座的示意图;图5为本发明实施例1的竖直铰接件示意图;图6为本发明实施例1的球面凹槽与转动球连接的示意图;图7为图1的局部放大图;图8为本发明实施例1的固定杆与定位杆连接的示意图;图9为本发明实施例1的固定器结构示意图;图10为本发明实施例1的滑动座内壁结构示意图;图11为本发明实施例1的直线滑槽内部结构示意图;图12为本发明实施例2的数学模型示意图。
24.图中:主支撑臂101、主固定连接座102、转动连接座103、辅助支撑臂104、副固定连接座105、上支撑段106、下支撑段107、支撑调节杆108、移动调节杆109、连接滑槽110、粗糙连接面111、固定环112、连接杆113、卡箍114、螺杆115、省力手柄116、套环117、水平铰接件118、竖直铰接件119、销轴120、弧形连接公端121、弧形连接母端122、球面凹槽123、转动球124、上调节臂201、下调节臂202、竖直角度调节臂203、固定杆204、弧形定位臂206、弧形支撑臂207、患肢连接端208、防护袖套209、绑带210、定位杆211、定位头212、限位滑块213、滑动通道214、限位孔215、螺纹套216、定位环217、滑动座218、调节螺母219、丝杆220、直线滑槽221、滑孔222、滑动段223、限位齿224、齿条225、锁定手柄226、滑动杆227、压簧228、弧形滑槽229、上限位板230、下限位板231、径向限位孔232、拉力计233、挡板234、支撑筒235。
具体实施方式
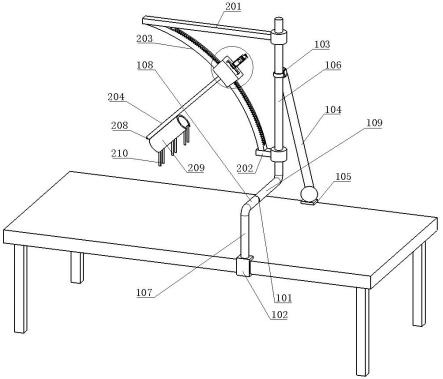
25.实施例1一种骨科微创手术用机械臂,包括与手术台相配合的手术调节机械臂,手术调节机械臂包括支撑装置,支撑装置上连接有患肢调节装置,患肢调节装置上连接有患肢固定装置;患肢固定装置包括固定杆204,还包括与固定杆204相配合的防护袖套209。
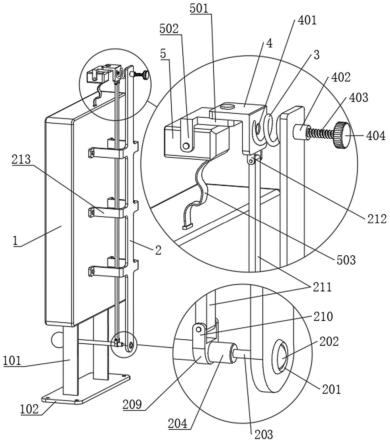
26.如图1所示,支撑装置包括主支撑臂101,主支撑臂101上设置有与手术台相配合的主固定连接座102;主支撑臂101上设置有转动连接座103,转动连接座103设置在主固定连接座102的上方;转动连接座103上连接有辅助支撑臂104,辅助支撑臂104下部设置有与手术台相配合的副固定连接座105;患肢调节装置与主支撑臂101连接。
27.如图2-3所示,主支撑臂101包括与患肢调节装置和辅助支撑臂104连接的上支撑段106,还包括与主固定连接座102连接的下支撑段107;上支撑段106的上部为和下支撑段107的下部均为竖直设置;下支撑段107的顶端为水平设置的支撑调节杆108,上支撑段106的底端是与支撑调节杆108连接的移动调节杆109,移动调节杆109为水平设置,支撑调节杆108和移动调节杆109之间为滑动连接,支撑调节杆108和移动调节杆109上设置有锁定机构;下支撑段107的底端和主固定连接座102转动连接;上支撑段106的竖直部分长度可调(采用现有技术调节长短,上支撑段106调节长短时,其连接的辅助支撑臂104和竖直角度调节臂203随其一同升高或者降低)。
28.移动调节杆109内开设有与其平行的连接滑槽110,移动调节杆109通过连接滑槽110套设在支撑调节杆108上,移动调节杆109、连接滑槽110和支撑调节杆108均为同轴设置的圆柱状结构。锁定机构包括在支撑调节杆108外环面上设置的一段粗糙连接面111,粗糙连接面111设置在支撑调节杆108远离移动调节杆109的一端;移动调节杆109靠近支撑调节杆108的一端固连有与其同轴的固定环112,固定环112上均布有与其轴线平行的连接杆113,连接杆113环绕固定环112均布;连接杆113为条状结构,连接杆113在其径向方向有弹性,向四周产生形变。连接杆113在轴向(长度方向)不发生形变或形变量小。多个连接杆113远离固定套的一端连接有卡箍114,卡箍114通过拧动螺杆115调节直径,卡箍114的螺杆115上设置有与其铰接的省力手柄116,省力手柄116可转动至与螺杆115在同一直线上,方便收放省力手柄116且不影响螺杆115转动。
29.如图4-6所示,转动连接座103包括与主支撑臂101固连的套环117,套环117在上支撑段106的上部套设。所述套环117上连接有水平铰接件118,水平铰接件118与套环117在水平方向上转动连接;第一铰接件上铰接有竖直铰接件119,竖直铰接件119与水平铰接件118通过水平的销轴120在竖直方向上转动连接;水平铰接件118上设置有外突形的弧形连接公端121,竖直铰接件119上设置有与弧形连接公端121同轴的弧形连接母端122;弧形连接公端121是在水平铰接件118远离套环117的一端设置的圆弧状的外突结构,弧形连接母端122是在竖直铰接件119与水平铰接件118相连接的一端设置的圆弧形槽状结构;竖直铰接件119远离水平铰接件118的一端与辅助支撑臂104固连,辅助支撑臂104与副固定连接座105在竖直和水平方向均转动连接,辅助支撑臂104长短可调,辅助支撑臂104包括滑动连杆和与滑动连杆滑动连接的固定连杆,滑动连杆和固定连杆上设置有锁定机构,滑动连杆和固定连杆上设置的锁定机构与支撑调节杆108和移动调节杆109上设置的锁定机构相同。副固定座上固连有球面凹槽123,球面凹槽123内转动连接有与辅助支撑臂104固连的转动球
124。弧形连接公端121和弧形连接母端122相结合可增加水平铰接件118和竖直铰接件119的接触面积,使两者连接更加稳定,使辅助支撑臂104的支撑更加稳定。
30.如图7所示,患肢调节装置包括在主支撑臂101上绕上支撑段106的竖直部分转动连接的上调节臂201(采用现有技术实现转动连接),上调节臂201与主支撑臂101的上支撑段106的上部垂直,上调节臂201设置在转动连接座103的上方;上调节臂201下方设置有与其平行且位于同一竖直面的下调节臂202,下调节臂202与主支撑臂101转动连接(采用现有技术实现转动连接);下调节臂202绕上支撑段106的竖直部分转动连接,上调节臂201与下调节臂202均水平转动。上调节臂201和下调节臂202上固连有弧形的竖直角度调节臂203,竖直角度调节臂203是在竖直面设置的圆弧形结构,其在竖直面上的正投影为圆弧形;竖直角度调节臂203上连接有固定杆204,固定杆204所在的直线经过竖直角度调节臂203的圆心和半径。竖直角度调节臂203中间开设有圆弧状的避位槽,固定杆204在避位槽中设置。竖直角度调节臂203被避位槽分成两个相互平行的弧形定位臂206和弧形支撑臂207,弧形定位臂206和弧形支撑臂207均为圆弧状结构,固定杆204在弧形定位臂206和弧形支撑臂207之间设置。
31.固定杆204为四棱柱状结构,固定杆204一端是与防护袖套209相连的患肢连接端208,患肢连接端208在竖直角度调节臂203的内环以内,防护袖套209上连接有绑带210;固定杆204的另一端为施力端,施力端连接有拉力计。
32.如图8所示,固定杆204内设置有与其平行的定位杆211;定位杆211位于固定杆204外的一端设置有定位头212,定位头212为球形结构;定位杆211的另一端(位于固定杆204内的一端)设置有限位滑块213;定位杆211与固定杆204延长度方向的中心线重合;固定杆204内开设有与限位滑块213滑动连接的滑动通道214,限位滑块213与滑动通道214均为四棱柱状结构;患肢连接端208开设有与滑动通道214连通的限位孔215,限位孔215的直径小于定位头212的直径;定位杆211上转动连接有螺纹套216,螺纹套216在定位杆211上套设,螺纹套216与定位杆211轴向固定设置,螺纹套216与患肢连接端208螺接。定位杆211上靠近定位头212的一端固连有定位环217,螺纹套216设置在定位环217和定位头212之间。
33.如图9-11所示,竖直角度调节臂203上连接有滑动座218,滑动座218上设置有与竖直角度调节臂203相配合的固定器;滑动座218与固定杆204沿固定杆204的长度方向滑动连接;滑动座218上转动连接有调节螺母219,拉力计远离固定杆204的一端固连有丝杆220,丝杆220远离拉力计的一端与调节螺母219螺接。拉力计与丝杆220均与固定杆204平行;滑动座218上固连有与拉力计相平行的直线滑槽221,直线滑槽221与拉力计滑动连接,直线滑槽221与拉力计的外壳均为四棱柱状结构。直线滑槽221一端与滑动座218固连,另一端设置有与丝杆220垂直的挡板234,挡板234上开设有四棱柱状的滑孔222,丝杆220上设置有四棱柱状的滑动段223,滑动段223与滑孔222滑动连接。挡板234远离滑动座218的一端固连有支撑筒235,支撑筒235的轴向与丝杆220的长度方向一致,调节螺母219在支撑筒235内设置且与支撑筒235径向转动连接,轴向固定连接。
34.竖直角度调节臂203的弧形定位臂206上均布有限位齿224,限位齿224设置在弧形定位臂206的外环面上;固定器包括与限位齿224啮合连接的齿条225,齿条225上固连有滑动杆227,滑动杆227与滑动座218滑动连接,滑动杆227远离齿条225的一端固连有锁定手柄226,滑动杆227上套设有压簧228;压簧228设置在滑动座218内。
35.滑动座218包括与竖直角度调节臂203的弧形支撑臂207滑动连接的弧形滑槽229;滑动座218包括与压簧228固连的上限位板230,压簧228设置在上限位板230与齿条225之间。滑动座218包括设置在竖直角度调节臂203内环面内侧的下限位板231,滑动座218的上限位板230和下限位板231上开设有与固定杆204滑动连接的径向限位孔232215。
36.实施例2本实施是采用如下方法的骨科微创手术用机械臂,包括以下步骤:步骤1,将支撑装置固定到手术台;将主固定连接座102和副固定连接座105固定到手术台的两侧。
37.步骤2,放出定位头212;拧动螺纹套216,将螺纹套216从固定杆204上取下,将定位杆211从固定杆204中拉出,限位滑块213在限位通道中滑动,限位滑块213移动至限位孔215位置时,定位头212伸出至极限位置,此时定位头212处于竖直角度调节臂203的圆心位置。
38.步骤3,调整固定杆204的水平位置;转动两个卡箍114上的螺杆115,使卡箍114松开,使支撑调节杆108和移动调节杆109之间可滑动,使滑动连杆和固定连杆之间可滑动,使主支撑臂101的水平长度和辅助支撑臂104的长度可调。通过转动上支撑段106,使上支撑段106通过支撑调节杆108和移动调节杆109带动下支撑段107在主固定连接座102上转动,进而使主支撑臂101转动;上支撑段106转动时带动竖直角度调节臂203和固定杆204在水平方向上转动。上支撑段106移动的同时带动套环117、水平铰接件118、竖直铰接件119和辅助支撑臂104转动;套环117带动水平铰接件118移动时,水平铰接件118与套环117之间的水平角度发生改变;同时辅助支撑臂104与副固定连接座105连接的一端随辅助支撑臂104发生水平转动,辅助支撑臂104同时进行自动伸缩。转动上支撑段106是为了调整定位头212与肩关节的水平距离,水平距离调整好后,转动上调节臂201和下调节臂202可调节竖直角度调节臂203与患肢的水平角度;调节好后将上调节臂201与下调节臂202与上支撑段106固定。定位头212与肩关节在竖直方向上处于一条直线,此时可继续调节上支撑段106的竖直部分的长度,使上支撑段106带动竖直角度调节臂203、固定杆204和定位杆211升降,使定位头212与肩关节位置重合;上支撑段106的竖直部分伸缩时带动辅助支撑臂104随之移动。定位头212位置调节好后,将定位杆211插入固定杆204中,将螺纹套216螺接在固定杆204上,避免定位头212影响手术。
39.在调节好固定杆204和患肢的水平角度后,转动螺杆115将两个卡箍114锁紧,将辅助支撑臂104的长度锁定,将支撑调节杆108与移动调节杆109锁定。如图12所示,在水平方向上辅助支撑臂104与手术台和支撑调节杆108、移动调节杆109组成三角形,且辅助支撑臂104、手术台和支撑调节杆108、移动调节杆109的长度固定,即三角形的三条边长度固定,则三角形固定。在竖直方向上,上支撑段106的竖直部分与手术台和辅助支撑臂104形成三角形结构,且辅助支撑臂104的长度固定,辅助支撑臂104底端与上支撑段106的竖直部分距离固定,上支撑段106的竖直部分与手术台角度固定为90
°
,因此直角三角形的斜边和一个直角边长度固定,则三角形固定。无需另外设置机构将上支撑段106的竖直部分长度固定,无需将主支撑臂101和主固定连接座102之间的角度固定,也无需将辅助支撑臂104与副固定连接座105的角度固定。
40.步骤4,固定患肢,调整固定杆204的竖直角度;患肢与调整好固定杆204的水平位置后,将防护袖套209与固定杆204连接,将患肢绑到防护袖套209上。将拉动锁定手柄226,
锁定手柄226带动齿条225与限位齿224脱离,压簧228缩短;然后在竖直角度调节臂203上转动锁定手柄226,锁定手柄226带动滑动座218与固定杆204在竖直角度调节臂203上转动,固定杆204转动带动患肢张开角度发生变化,当患肢张开角度合适时松开锁定手柄226,压簧228对齿条225时间压力,齿条225与限位齿224啮合,固定杆204在竖直角度调节臂203上的角度固定,患肢张开角度固定。
41.步骤5,对患肢施加拉力;患肢张开角度固定后,转动调节螺母219,调节螺母219转动带动丝杆220移动,丝杆220带动拉力计拉动固定杆204,使固定杆204带动患肢张紧,通过转动调节螺母219使丝杆220和拉力计的移动量不同可调节拉力的大小。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。