1.本发明涉及一种视网膜手术的穿刺装置及其受力检测方法。
背景技术:
2.视网膜手术是眼科乃至整个临床外科中操作复杂、难度高的手术,其原因主要为以下两点:(1)视网膜组织脆弱:视网膜厚度仅约0.3mm,静脉直径小于0.2mm,动脉直径小于0.1mm,组织损伤后不可再生,意外的触碰就有可能导致组织损伤和功能受损;(2)手术操作复杂:需要在眼球内完成吸、切、抓、剥、放、剪等复杂的手术操作,甚至需要在视网膜表面进行触碰、抓取等操作。因此,视网膜外科手术医生需要有非常好的操作精确性和稳定性。医生在手术操作时的平均颤抖幅度为108μm,而视网膜手术的操作精确度较高,生理性颤抖是导致术源性组织损伤,从而影响手术效果的重要原因。在视网膜手术过程中,施术者手部的震颤通过棍状的手术器械,传递到器械头端。器械头端在视网膜表面的震颤幅度及其频率,转化为对组织机械压力大小和压迫次数,进而导致医源性损伤,其中机械压力是最主要的致伤因素。有研究表明,视网膜手术操作时的力学反馈小于7.5mn,如此微小的力量是人手无法感知的。
技术实现要素:
3.本发明的目的在于提供一种能够在视网膜手术中监测穿刺受力情况,并通过不同的提示进行提示的视网膜手术的穿刺装置及其受力检测方法。
4.为了实现上述目的,本发明的第一方面涉及一种视网膜手术的穿刺装置,包括:
5.感应装置,具有连接端,连接端用于连接穿刺件,感应装置被设置成监测所述连接端上所接穿刺机构的受力情况,
6.提示系统,与感应装置通信连接,所述的提示系统可接收来自感应装置发送的信号,并根据所接收的信号进行提示。
7.在本发明第一方面的一些实施例中,所述的感应装置包括微力感应器和连接件,微力感应器的感应侧安装有所述的连接件,连接件上具有所述的连接端,穿刺件安装于连接件上时,穿刺件的中心轴同轴于微力感应器的检测原点。
8.在本发明第一方面的一些实施例中,所述的微力感应器为六轴微力感应器。
9.在本发明第一方面的一些实施例中,所述的提示系统包括接收装置、处理装置和提示器,所述的感应装置与所述的接收装置通信连接,所述的接收装置与所述的处理装置通信连接,所述的处理装置和通信提示器通信连接。
10.在本发明第一方面的一些实施例中,所述的提示系统还包括显示装置,所述的处理装置与显示装置通信连接。
11.在本发明第一方面的一些实施例中,所述的处理装置为手术机器人的主机。
12.在本发明第一方面的一些实施例中,所述的穿刺件包括穿刺针。
13.在本发明第一方面的一些实施例中,所述的穿刺件还包括管件,所述的管件具有
与连接端套接的第一管口,以及与穿刺针连通的第二管口。
14.在本发明第一方面的一些实施例中,所述的管件为三通管,三通管具有可与输液泵或吸气泵连通的第三管口。
15.本发明的第二方面涉及上述穿刺装置的受力监测方法:
16.感应装置监测的所述穿刺件的受力情况,将带有受力情况的信号发送给提示系统,
17.提示系统接收来自感应装置的所述信号,提示系统中预设有穿刺可接收的压力范围,当穿刺件的受力大于所述的压力范围时,提示系统进行提示。
18.在本发明第二方面的一些实施例中,所述提示系统中还预设有刚接触视网膜的应力阈值、穿刺至浅层视网膜的应力阈值,以及穿刺到深层视网膜的应力阈值,当提示系统接收到的穿刺件的受力大于相应的应力阈值时,提示系统进行不同的提示。
19.在本发明第二方面的一些实施例中,所述的提示系统根据穿刺件的的受力大小,进行不同频率或不同音量的提示。
20.在本发明第二方面的一些实施例中,所述的受力情况包括受力大小和受力方向。
21.本发明的穿刺装置用于视网膜手术,在穿刺的过程中可以通过提示的方式对于穿刺针的受力情况进行提示,而穿刺针的受力情况是施术者握持穿刺装置对眼球进行施力时的力反馈,从而使得施术者能够在术中操作穿刺装置时将穿刺的力量、震颤、穿刺位置与提示建立联系,进而降低和避免产生医源性损伤的可能。
附图说明
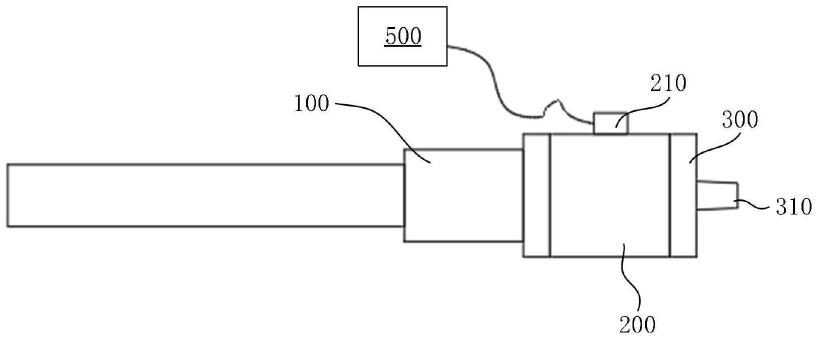
22.图1是本发明穿刺装置的一种结构示意图。
23.图2是微力感应器的一种结构示意图。
24.图3是穿刺针安装于连接端上的示意图。
25.图4是穿刺针通过三通管连接在连接端上的示意图。
26.图中:100.握持件,200.微力感应器,210.信号输出端,220.安装面板,230.固定底面,300.连接件,310.连接端,400.穿刺针,500.提示系统,700.三通管。
具体实施方式
27.在视网膜手术中,施术者虽然能够稳定的进行手术,然而依然会产生察觉不到的颤抖,这种颤抖很有可能会对进行手术的眼部造成压迫,并有可能进而导致医源性损伤。由于存在上述问题,本发明旨在提供一种能够监测出这种细微颤抖的穿刺装置,以在术中,或在训练时,对穿刺时产生的力反馈进行监测和提示,从辅助施术者能够在安全可控的范围内进行手术操作。该穿刺装置中主要包括:感应装置,具有连接端,连接端用于连接穿刺件,感应装置被设置成监测所述连接端上所接穿刺机构的受力情况;以及提示系统,与感应装置通信连接,所述的提示系统可接收来自感应装置发送的信号,并根据所接收的信号进行提示。由于穿刺机构的受力情况是穿刺过程中穿刺件对穿刺部位压力的反作用力,因而根据的所监测的穿刺件的受力情况并据此提供相应的提示能够很好的辅助施术者在穿刺过程中避免产生对穿刺部位施力过重造成损伤的情况,另一方面,由于眼球中各组织所产生的压力不同,穿刺机构的受力情况还可以反应穿刺针前端所处的位置,从而防止穿刺机构
对视网膜造成医源性的损伤。
28.上述穿刺装置的一种具体结构如图1~2所示,感应装置包括了微力感应器200和连接件300,微力感应器200的感应侧安装有所述的连接件300,连接件300上具有连接端310,穿刺件安装于连接件上时,穿刺件的中心轴同轴于微力感应器的检测原点。微力感应器200可以采用可以检测到力学反馈小于7.5mn微力的任何六轴力/力矩感应器,其结构如图2所示,其包括了一个感应面板220,连接件300安装在该感应面板220上,还包括了一个固定底面230,本实施例中在固定底面230上安装了握持件100,以方便进行握持。六轴力/力矩感应器200还具有一个信号输出端210,该信号输出端210可将含有穿刺件受力情况的电信号通过信号线发送到提示系统500中。其中一种符合上述要求的六轴力/力矩感应器是ati公司的nano-17六轴力/力矩感应器。
29.采用的穿刺件包括但不限于穿刺针、软笛针、钢针等等,连接端310可被设计成与上述穿刺针、软笛针、钢针尾端配合套接的形状,穿刺针、软底针、钢针套接在连接端310上后能够同轴于微力感应器200的检测原点。图3展示了穿刺针400套接在连接端上时的结构。在另一些实施例中,穿刺件还包括管件。如图4所示,采用的管件可为三通管700,三通管700具有与连接端套接的第一管口710,与穿刺针400连通的第二管口720,以及与输液泵或吸气泵连通的第三管口730,用于向穿刺部位进行注射和吸取操作。
30.所述的提示系统包括接收装置、处理装置和提示器,所述的感应装置与所述的接收装置通信连接,所述的接收装置与所述的处理装置通信连接,所述的处理装置和通信提示器通信连接。接收装置用于接收来自感应装置的信号,并将其转换为处理装置可接受的信号形式,如在采用计算机作为处理装置接受微力感应器传输的电信号时,需要先通过数电转换电路形成数字信号,接收装置就用来接收微力感应器的电信号并转换为数字信号发送给计算机,这种接受装置一般可以通过市售获得。而处理装置在接收到含有穿刺件受力情况的信号后,可根据不同的受力情况向提示器发送相应的指令/信号,控制提示器进行不同的提示,如当计算机作为处理装置时,可通过执行一定的程序,从而依据不同的受力情况,控制提示器进行提示。提示器的一种可实现形式是扬声器,处理装置根据接收的受力情况,根据预设的规则向扬声器发送不同的音频信号,扬声器接收到音频信号后进行播放。这些预设规则会在后面对于方法的介绍中进行具体说明。进一步的,提示系统还可以包括显示装置,所述的处理装置与显示装置通信连接,用来直观的显示所测得的受力情况,如计算机的显示器就可以作为与计算机连接的显示装置。在另一些实施例中,处理装置可直接利用手术机器人的主机,从而减少设备的数量。
31.上述穿刺设备受力监测主要是通过下述方法步骤进行的:
32.感应装置监测的所述穿刺件的受力情况,将带有受力情况的信号发送给提示系统,
33.提示系统接收来自感应装置的所述信号,提示系统中预设有穿刺可接收的压力范围,当穿刺件的受力大于所述的压力范围时,提示系统进行提示。
34.同样的,上述监测方法中,通过对的穿刺针受力的情况来对施术者进行提示,能够防止手术中对视网膜造成医源性的损伤。
35.在进行视网膜穿刺的过程中,当穿刺针刚接触到视网膜时,穿刺针的受力会发生变化,提示系统可以根据受力的变化提示穿刺针已经接触到了视网膜,这样就使得压力的
变化与穿刺针的位置产生了关联。相比于原本仅通过实时oct图像进行的穿刺手术,能够实现更精确的穿刺力量、位置的把控,进而防止医源性的损伤。
36.除了监测受力大小外,可以在提示系统中预设一些规则控制提示器进行不同种类、程度的区分提示。如在所述提示系统预设有刚接触视网膜的应力阈值、穿刺至浅层视网膜的应力阈值,以及穿刺到深层视网膜的应力阈值,当提示系统接收到的穿刺件的受力大于相应的应力阈值时,提示系统进行不同的提示。以提示系统的处理装置采用计算机,提示系统采用扬声器为例,计算集中储存了上述刚接触视网膜的应力阈值、穿刺至浅层视网膜的应力阈值,以及穿刺到深层视网膜的应力阈值,当接收到的信号中的受力数值大小超过了所设定的阈值,就可以进行不同声音、音量的提示。计算机根据数据比较进行不同提示是可以通过现有的程序实现的,提示音可以采用在计算机中预存的音频。除此以外,在穿刺过程中,随着穿刺力的逐渐增大,提示的音量可以控制随之而增大,使得施术者在手术中始终能够让自己的用力与提示相互关联,并且在力量过大时进行区别的提示,从而协助施术者操作穿刺装置。
37.而关于上述各应力阈值以及穿刺可接受的范围,可通过使用上述穿刺装置进行医学实验统计获得。
38.在进行视网膜穿刺手术时,将穿刺针安装在穿刺装置的连接端上,整个穿刺过程中,由六轴力/力矩感应器实时监测穿刺力的大小,随着施术者穿刺力变大变小,扬声器中产生的提示音的音量也随之变大或变小,施术者依据音量来控制自己的用力,使之保持在一定的范围内,以避免产生对眼球的医源性损伤,当眼球刚接触到视网膜表面时,由于应力的变化,处理装置识别到这种变化,并更换提示音进行提示,施术者一边观察oct进行手术,一边听取的提示音控制自己的用力,保证手术安全的进行。
39.本发明中的实施例仅用于对本发明进行说明,并不构成对权利要求范围的限制,本领域内技术人员可以想到的其他实质上等同的替代,均在本发明保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。