1.本发明涉生物质炭技术及智能系统清除污染物应用领域,具体涉及一种利用形状记忆生物质炭清除水体油类污染物的智能系统。
背景技术:
2.石油的开采、炼制、运输、使用等过程均会产生油类污染物的废水,其中近几年以来发生的石油泄漏、石油排放等问题屡见不鲜,主要发生在海洋等水体中,人类生产活动也会产生含有油类污染物的废水排放。当油膜覆盖在水面上,会减少阳光的透射量,降低水中的溶解氧浓度,严重破坏水体中的生态系统,导致鱼类的死亡、水体变臭、水生植物无法正常生长等问题。
3.对于水体中油类污染物的清除,仅仅依靠河道水体的自净功能很难解决,依靠人工的方式处理,会增加污染物清除的时间和经济成本且人工处理存在一定的安全隐患。现有的油类污染物处理装置结构复杂、体积庞大、清除步骤繁琐,需要专业人士进行操作,处理成本高、效率低。因此,本发明提出和发明了一种高效、环保、智能的水体油污清理智能系统,能够自动识别和收储油污,将油污回收利用,解决水体油污污染的难题。
技术实现要素:
4.本发明提供了一种利用形状记忆生物质炭清除水体油类污染物的智能系统,在提高污染物去除率的同时降低了成本。本发明的智能系统利用太阳能供电驱动装置,可以在河、海、湖等水体中运作,控制系统自动识别油类污染物并收集,利用形状记忆生物质炭进行快速高效的收集、吸附、储存,解决水体油污污染的难题。
5.一种利用形状记忆生物质炭清除水体油类污染物的智能系统,包括:
6.壳体;
7.设置在所述壳体上的驱动装置;
8.设置在所述壳体上的油污收集装置;
9.与所述油污收集装置对接的油污吸附装置,所述油污吸附装置内设置有形状记忆生物质炭材料;
10.设置在所述形状记忆生物质炭材料外周的挤压装置;
11.与所述挤压装置连接的油污储存装置;
12.以及与所述驱动装置、油污收集装置、油污吸附装置、挤压装置连接的控制系统。
13.本发明的系统包括:驱动装置、控制系统、油污收集装置、形状记忆生物质炭材料、油污吸附装置、挤压装置、油污储存装置,所述油污储存装置与挤压装置相连。本发明利用太阳能作为驱动能源,控制系统自动识别油类污染物所在水域,油污收集装置收集被污染的水体,形状记忆生物质炭吸附油类污染物。形状记忆生物质炭材料是有生物质炭和聚氨酯、聚乙烯等高分子材料进行分子组合和改性制成,可压缩、疏水性强、吸附容量高。通过挤压器将吸附饱和的形状记忆生物质炭挤压再生,实现可持续清理油污,显著提高了油污收
集效率;将清理好的油类污染物装入储油袋中,让其漂浮在水面上,最终一次性运回岸边,解决了油污储存难题,降低了系统的成本,具有显著的经济效益和环境效益。
14.所述驱动装置包括太阳能电板、蓄电池、转换器、变桨驱动设备以及螺旋桨。所述太阳能电板与所述蓄电池通过所述转换器固定连接;所述变桨驱动设备与所述蓄电池连接,所述变桨驱动设备连接所述螺旋桨;所述螺旋桨位于智能系统(即机器人)的底面,依靠变桨驱动设备的驱动力前进。
15.所述驱动装置中的太阳能面板吸收太阳能通过转换器将太阳能转化为电能储存于蓄电池中,所述蓄电池供给变桨驱动设备电能,所述变桨驱动设备带动螺旋桨的运转,实现机器人的运作。
16.所述控制系统包括油污识别装置、gps-红外耦合系统、摄像头、远程控制装置、电机,所述油污识别装置与所述电机、变桨驱动设备连接,当油污识别装置自动识别到油类污染物所在的水域时,所述电机与变桨驱动设备控制机器人的运作路径;所述电机与所述变桨驱动设备连接,控制机器人的正、反向旋转和转速;所述gps-红外耦合系统连接所述摄像头,实时反馈机器人的位置信息与周边的环境状况,避免与障碍物发生碰撞;所述远程控制装置与所述变桨驱动设备、电机连接,支持实时反馈信息以及使用者的无线远程操控。
17.所述控制系统包括gps-红外耦合系统、摄像头、远程控制装置、油污识别装置、电机,所述gps-红外耦合系统与摄像头连接,用于使用者规划机器人的油污清理工作路径,同时实时定位机器人的具体位置并结合摄像头实时反馈的周边状况,避免与障碍物发生碰撞;所述远程控制系统与变桨驱动装置、电机相连接,便于使用者远程操控。
18.所述油污识别装置与电机、变桨驱动设备相连接,通过图像识别分辨油污和其他漂浮物,自动识别油污所在的水域后,利用电机和变桨驱动装置控制机器人的工作路径。
19.所述电机与变桨驱动设备连接,主要用于控制机器人的正、反向旋转和转速。
20.所述油污收集装置与控制系统连接,所述控制系统中的油污识别装置识别到油类污染物所在水域后,所述变桨驱动装置和电机驱动机器人的运动,靠近油污污染水域,油污收集装置由可自动调节开口角度的人字形机械臂组成,开口角度可调范围30~170
°
,油污收集装置可收集该水域的油污,用于下一步环节的处理。
21.所述形状记忆生物质炭材料是由生物质炭和聚氨酯、聚乙烯等高分子材料进行分子组合和改性获得的,具有可压缩、疏水性强特性,油污吸附容量为10~20g/g,比表面积大为1000~1500m2/g。油污吸附饱和后,可通过挤压将油污分离出来,存入储油袋中,同时恢复到未压缩形态,储油袋容量为100~300l。所述生物质炭可由秸秆、木屑、竹料等废弃生物质在缺氧环境下通过850~950℃煅烧制成,因其表面具有丰富的官能团、比表面积大、孔隙结构发达,对于污染物的吸附清除效率高;所述生物质炭经过嫁接表面活性剂的方式疏水改性,增强对于油类污染物的吸附作用强。所述形状记忆生物质炭质量轻,成本低,吸附了大量油类污染物后,可以将其置于缺氧条件下850~950℃重新煅烧制成新的形状记忆生物质炭用于再一次的吸附清除工作,有效的实现了产品的循环利用,达到了绿色、低碳、循环的效果。
22.所述油污吸附装置安装在油污收集装置后侧,所述油污吸附装置包括可自动开闭网箱和间歇式更换器,所述可自动开闭网箱中装有长60cm、宽20cm、高10cm的形状记忆生物质炭,可自动开闭网箱由控制系统控制,但网箱内的形状记忆生物质炭吸附油污饱和后,由
间歇式更换器将其更换到挤压装置中。
23.所述挤压器能够根据吸附情况,自动定时挤压清除形状记忆生物质炭上吸附的油污,油污由出油口排入储油袋中储存,形状记忆生物质炭再循环用于吸附油污。
24.所述油污储存装置包括储油袋、自动换袋及封口装置、绳索,储油袋与可自动开闭网箱出油口相连,接收挤压器作用下排出的油污,当装满油污后,利用自动封口装置将其密封,然后将储油袋与智能系统分离,让其依靠浮力漂浮在水面上,储油袋间由绳索串联,绳索的一段连接到智能系统上,利用自动换袋装置更换新的储油袋接收纳油污,当工作结束,油污清理智能系统通过绳索将收集的油污带回岸边收集处置。
25.与现有技术相比,本发明具有的有益效果为:
26.本发明利用太阳能作为驱动能源,控制系统自动识别油类污染物所在水域,油污收集装置收集被污染的水体,显著提高了油污收集精准度;利用形状记忆生物质炭清除水体中油类污染物,通过挤压器将吸附饱和的形状记忆生物质炭挤压再生,实现可持续性清理油污,显著提高了油污收集效率;将清理好的油类污染物装入储油袋中,让其漂浮在水面上,最终一次性运回岸边,解决了油污储存难题,显著降低了系统的成本;利用废弃生物质制备形状记忆生物质炭材料,有效的实现了资源循环利用,达到绿色、低碳、循环的效果。
附图说明
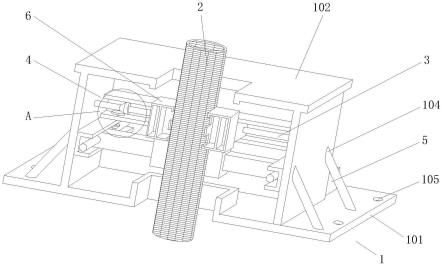
27.图1是本发明一种利用形状记忆生物质炭清除水体油类污染物的智能系统及方法的结构示意图。
具体实施方式
28.本发明可用于河、海、湖泊等油污污染水体治理,下面结合附图,对用于海面石油污染物清除的形状记忆生物质炭清除水体油类污染物的智能系统及方法做详细说明。
29.如图1所示,为本发明利用形状记忆生物质炭清除水体油类污染物的智能系统,包括:驱动装置1、控制系统2、油污收集装置3、形状记忆生物质炭材料4、油污吸附装置5、油污储存装置6、挤压装置7,控制系统2与驱动装置1、油污收集装置3、油污吸附装置5、挤压装置7连接,油污储存装置6与挤压装置7相连。
30.驱动装置1主要包括太阳能电板、蓄电池、转换器、变桨驱动设备、螺旋桨。太阳能电板与蓄电池通过转换器固定连接。
31.变桨驱动设备与蓄电池连接,变桨驱动设备连接螺旋桨;螺旋桨位于机器人的底面,依靠变桨驱动设备的驱动力前进。
32.驱动装置1中的太阳能面板吸收太阳能通过转换器将太阳能转化为电能储存于蓄电池中,蓄电池供给变桨驱动设备电能,变桨驱动设备带动螺旋桨的运转,实现机器人的运作。
33.控制系统2包括油污识别装置、gps-红外耦合系统、摄像头、远程控制装置、电机,油污识别装置与电机、驱动装置1连接,当油污识别装置自动识别到石油类污染物所在的水域时,电机与驱动装置1控制机器人的运作路径;电机与驱动装置1连接,控制机器人的正、反向旋转和转速;gps-红外耦合系统连接摄像头,实时反馈机器人的位置信息与周边的环境状况,避免与障碍物发生碰撞;远程控制装置与驱动装置1、电机连接,支持实时反馈信息
以及使用者的无线远程操控。
34.控制系统2包括gps-红外耦合系统、摄像头、远程控制装置、油污识别装置、电机,gps-红外耦合系统与摄像头连接,用于使用者规划机器人的油污清理工作路径,同时实时定位机器人的具体位置并结合摄像头实时反馈的周边状况,避免与障碍物发生碰撞;远程控制系统2与变桨驱动装置1、电机相连接,便于使用者远程操控。
35.油污识别装置与电机、变桨驱动设备相连接,通过图像识别分辨油污和其他漂浮物,自动识别油污所在的水域后,利用电机和变桨驱动装置1控制机器人的工作路径。
36.电机与变桨驱动装置1连接,主要用于控制机器人的正、反向旋转和转速。
37.油污收集装置3与控制系统2连接,控制系统2中的油污识别装置识别到油类污染物所在水域后,驱动装置1和电机驱动机器人的运动,靠近油污污染水域,油污收集装置3由可自动调节开口角度的人字形机械臂组成,油污收集装置3可收集该水域的油污,用于下一步环节的处理。
38.形状记忆生物质炭材料4是由生物质炭和聚氨酯、聚乙烯等高分子材料进行分子组合和改性获得的,生物质炭、聚氨酯和聚乙烯的质量比为2:1:0.5。形状记忆生物质炭材料油污吸附容量为15g/g,比表面积大1200m2/g,油污吸附饱和后,可通过挤压将油污分离出来,存入储油袋中,同时恢复到未压缩形态。生物质炭可由秸秆、木屑、竹料等废弃生物质在缺氧环境下通过900℃煅烧制成,因其表面具有丰富的官能团、比表面积大、孔隙结构发达,对于污染物的吸附清除效率高;所述生物质炭经过疏水改性,其分子表面具有疏水性,对于油类污染物的吸附作用强。形状记忆生物质炭材料4质量轻,成本低,吸附了大量油类污染物后,可以将其置于900℃缺氧条件下重新煅烧制成新的形状记忆生物质炭材料4用于再一次的吸附清除工作,有效的实现了产品的循环利用,达到了绿色、低碳、循环的效果。
39.油污吸附装置5安装在油污收集装置3后侧,油污吸附装置5包括可自动开闭网箱和间歇式更换器,可自动开闭网箱中装有形状记忆生物质炭材料4,可自动开闭网箱由控制系统2控制,但网箱内的形状记忆生物质炭材料4吸附油污饱和后,由间歇式更换器将其更换到挤压装置7中,根据需求可设置3段形状记忆生物质炭材料4,轮流用于吸附、挤压和备用。
40.挤压器能够根据吸附情况,自动定时挤压清除形状记忆生物质炭材料4上吸附的油污,油污由出油口排入储油袋10中储存,形状记忆生物质炭材料4再循环用于吸附油污。
41.油污储存装置6包括储油袋10、自动换袋及封口装置8、绳索9,储油袋10与可自动开闭网箱出油口相连,接收挤压器作用下排出的油污,当装满油污后,利用自动封口装置将其密封,然后将储油袋10与智能系统分离,让其依靠浮力漂浮在水面上,储油袋10间由绳索9串联,绳索9的一段连接到智能系统上,利用自动换袋装置更换新的储油袋10接收纳油污,储油袋的容量为120l,当工作结束,油污清理智能系统通过绳索9将收集的油污带回岸边收集处置。
42.以上所述的具体实施方式对本发明的技术内容和有益效果特点进行了详细的阐述,以上所述仅为本发明的最优实施方式,并非对本发明的构思和范围进行限制。在不脱离本发明设计构思的前提下,本领域普通人员对本发明技术内容做出的各种改进与变型,均落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。