1.本技术涉及骨外科脱位复位技术领域,具体涉及一种可调的肩关节脱位的复位装置。
背景技术:
2.肩关节由肩胛骨的关节盂和肱骨头构成,属球窝关节,肩关节的关节囊薄而松弛,所以肩关节是人体运动范围最大而又最灵活的关节,它可做前屈、后伸、内收、外展、内旋、外旋以及环转等运动,但肩关节的这个结构上的特点虽然保证了它的灵活性,但它的牢固稳定性都较其他关节为差,是全身大关节中结构最不稳固的关节,最常见的是向肩关节的前下脱位。
3.肩关节脱位是骨科非常常见的疾病之一,发病较急,较疼痛,通常要求在较短时间内使患者在较小痛苦下完成复位,现有技术中患者只能坐在椅子上,椅子的高度和椅背的角度固定,不能根据实际情况进行调节,因此复位时不太方便。
技术实现要素:
4.有鉴于此,本技术提供一种可调的肩关节脱位的复位装置,以解决上述技术问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种可调的肩关节脱位的复位装置,包括:
7.底板;
8.安装在所述底板上的升降机构;
9.活动连接在所述升降机构上的放置板,所述升降机构能够驱动所述放置板上下移动;
10.铰接在所述放置板左端的靠板;
11.连接在所述靠板和所述放置板之间的调节机构,通过所述调节机构能够对所述靠板和所述放置板之间的角度进行调节;
12.安装在所述靠板顶部的弧形板;
13.对称设置在所述弧形板前后两端的一对缓冲机构,通过所述缓冲机构能够减缓人在倚靠所述弧形板时的疼痛,使得使用更加舒适。
14.进一步地,所述升降机构包括:
15.一对分别安装在所述放置板和所述底板上的铰接座;
16.一对分别安装在所述放置板和所述底板上的连接板;
17.活动设置在一对所述铰接座和一对所述连接板之间的叉臂。
18.更进一步地,所述叉臂通过油缸驱动。
19.进一步地,所述调节机构包括:
20.安装在所述放置板左端底部的连接件;
21.安装在所述靠板左侧的滑动杆;
22.连接在所述连接件和滑动杆之间的驱动组件,通过所述驱动组件驱动所述滑动杆在所述连接件内滑动,以调节所述靠板的放置角度。
23.更进一步地,所述驱动组件包括:
24.安装在所述连接件上的支座;
25.安装在所述支座上的电机;
26.安装在所述电机前端的第一齿轮;
27.啮合连接在所述第一齿轮和所述滑动杆之间的第二齿轮。
28.更进一步地,所述滑动杆上设有能够与所述第二齿轮相啮合的若干个连接齿。
29.更进一步地,所述连接件内开设有能够与所述滑动杆滑动配合的滑动槽。
30.进一步地,所述缓冲机构包括:
31.安装在所述弧形板上开设的相应的安装槽内的壳体;
32.滑动设置在所述壳体的顶板内的压杆;
33.连接在所述压杆右端的压板;
34.抵持在所述顶板和所述压板之间的压缩弹簧;
35.连接在所述压杆的左端且位于所述壳体内的第一压块;
36.对称铰接在所述壳体内的一对第二压块,所述第一压块抵压在一对所述第二压块上;
37.对称铰接在所述壳体内的一对销座,所述销座抵压在相应的所述第二压块上;
38.对称铰接在所述壳体内的一对扭簧,所述扭簧抵压在相应的所述销座上。
39.从上述的技术方案可以看出,本发明的优点是:
40.1.本发明中设有调节机构,能够调节靠板的放置角度,使得患者坐着复位更加舒适,从而复位效果更好。
41.2.本发明中还设有缓冲机构,能够对肩部进行缓冲,减缓了肩部脱位复位时的疼痛,保证了患者复位的效果。
附图说明
42.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
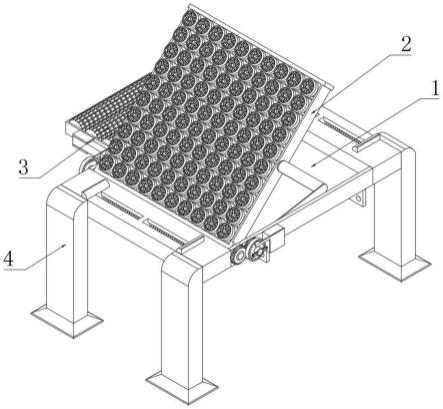
43.图1为本技术的结构示意图。
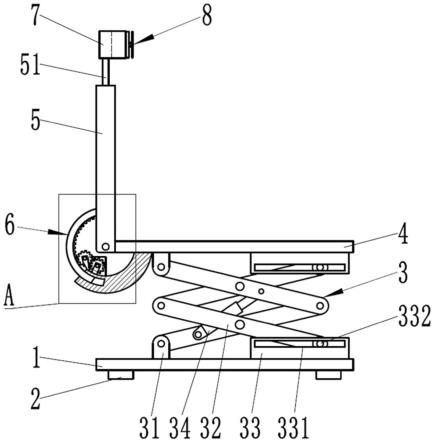
44.图2为图1的a处局部放大图。
45.图3为本技术的靠板和弧形板的俯视图。
46.图4为图3的b处局部放大图。
47.附图标记列表:底板1、撑脚2、升降机构3、铰接座31、叉臂32、连接板33、滑槽331、滑块332、油缸34、放置板4、靠板5、连接杆51、调节机构6、连接件61、滑动槽611、滑动杆62、连接齿621、支座63、电机64、第一齿轮65、第二齿轮66、弧形板7、安装槽71、缓冲机构8、壳体81、顶板82、压板83、压杆84、压缩弹簧841、第一压块842、第二压块85、销座86、销861、扭簧97。
具体实施方式
48.为使本技术的目的、技术方案和优点更加清楚明白,下面结合实施方式和附图,对本技术做进一步详细说明。在此,本技术的示意性实施方式及其说明用于解释本技术,但并不作为对本技术的限定。
49.参考图1至图4,如图1所示,本实施例提供一种可调的肩关节脱位的复位装置,既能调节靠板的角度,又能调节放置板的高度,还能通过缓冲来减轻患者坐在放置板上的不适感,使得使用方便,且复位效果更好,该可调的肩关节脱位的复位装置包括:底板1;升降机构3,所述升降机构3安装在所述底板1上;放置板4,所述放置板4活动连接在所述升降机构3上,所述升降机构3能够驱动所述放置板4上下移动;靠板5,所述靠板5铰接在所述放置板4的左端;调节机构6,所述调节机构6连接在所述靠板5和所述放置板4之间,通过所述调节机构6能够对所述靠板5和所述放置板4之间的角度进行调节;弧形板7,所述弧形板7安装在所述靠板5的顶部;一对缓冲机构8,一对缓冲机构8对称设置在所述弧形板7的前后两端,通过所述缓冲机构8能够减缓人在倚靠所述弧形板7时的疼痛,使得使用更加舒适。
50.优选地,所述底板1上设有耐磨防滑的撑脚2,以提高底板1放置时的稳定性。
51.优选地,所述弧形板7通过连接杆51与靠板5相连接。
52.优选地,所述升降机构3包括:一对铰接座31,一对所述铰接座31分别安装在所述放置板4和所述底板1上;一对连接板33,一对所述连接板33分别安装在所述放置板4和所述底板1上,且所述铰接座31位于相应的所述连接板33的左侧;叉臂32,所述叉臂32的左端的上下两侧分别铰接在相应的所述铰接座31上,所述叉臂32的右端的上下两侧分别滑动连接在相应的所述连接板33上。
53.优选地,所述叉臂32通过油缸34驱动。
54.优选地,所述叉臂32包括第一叉臂、第二叉臂、第三叉臂和第四叉臂,第一叉臂与第二叉臂的中部铰接,第三叉臂与第四叉臂的中部铰接,第一叉臂的左端铰接在下方的铰接座31上,第一叉臂的右端铰接在第四叉臂的右端,第二叉臂的的左端与第三叉臂的左端铰接,第二叉臂的右端通过滑块332与下方的所述连接板33上开设的滑槽331滑动配合,第三叉臂的右端通过滑块332与上方的所述连接板33上开设的滑槽331滑动配合,第四叉臂的左端铰接在上方的铰接座31上。
55.优选地,所述油缸34铰接在第一叉臂上,且所述油缸34的输出端铰接在第三叉臂上。
56.如图2所示,所述调节机构6包括:连接件61,所述连接件61安装在所述放置板4的左端底部;滑动杆62,所述滑动杆62安装在所述靠板5的左侧;驱动组件,所述驱动组件连接在所述连接件61和滑动杆62之间,通过所述驱动组件驱动所述滑动杆62在所述连接件61内滑动,以调节所述靠板5的放置角度。
57.优选地,所述驱动组件包括:支座63,所述支座63安装在所述连接件61上;电机64,所述电机64安装在所述支座63上;第一齿轮65,所述第一齿轮65安装在所述电机64的前端;第二齿轮66,所述第二齿轮66啮合连接在所述第一齿轮65和所述滑动杆62之间。
58.优选地,所述滑动杆62上设有若干个连接齿621,所述第二齿轮66能够与所述连接齿621相啮合。
59.优选地,所述连接件61内开设有滑动槽611,所述滑动杆62能够在所述滑动槽611
内滑动,所述滑动槽611为弧形结构。
60.优选地,所述电机64启动能够带动第一齿轮65转动,第一齿轮65能够带动第二齿轮66转动,第二齿轮66能够通过带动滑动杆62的转动来使得靠板5转动。
61.优选地,当电机64顺时针转动时,所述第一齿轮65顺时针转动,所述第二齿轮66逆时针转动,于是滑动杆62带动靠板5逆时针转动,此时靠板5与放置板4之间的角度变大,同理,电机64逆时针转动时,所述靠板5顺时针转动,此时靠板5与放置板4之间的角度变小。
62.如图3和图4所示,所述缓冲机构8包括:壳体81,所述壳体81安装在所述弧形板7上开设的相应的安装槽71内;压杆84,所述压杆84滑动设置在所述壳体81的顶板82内;压板83,所述压板83连接在所述压杆84的右端;第一压块842,所述第一压块842连接在所述压杆84的左端且位于所述壳体81内;一对第二压块85,一对所述第二压块85对称铰接在所述壳体81内,所述第一压块842抵压在一对所述第二压块85上;一对销座86,一对所述销座86对称铰接在所述壳体81内,所述销座86抵压在相应的所述第二压块85上;一对扭簧97,一对所述扭簧97对称铰接在所述壳体81内,所述扭簧97抵压在相应的所述销座86上。
63.优选地,所述压杆84上套设有压缩弹簧841,所述压缩弹簧841抵持在所述顶板82和所述压板83之间。
64.优选地,所述销座86上设有销861,所述扭簧97抵压在所述壳体81底部和相应的所述销861之间。
65.优选地,当肩部靠在压板83上时,压板83左移,使得压杆84带动第一压块842左移的同时挤压压缩弹簧841,第一压块842会挤压一对第二压块85,使得一对第二压块85相互靠近的一端相对转动,从而使得一对销座86相互靠近的一端相对转动,于是一对扭簧97被压缩,从而,通过各部件的联动作用,以及压缩弹簧841和扭簧97的弹性作用来提供缓冲力,通过缓冲,能够减缓患者复位时的痛苦,使得复位效果更好。
66.工作原理:患者坐在放置板4上,根据患者高度操作升降机构3来调节放置板4的高度,以及通过操作调节机构6来调节靠板5的角度,调节完毕,对患者进行复位即可。
67.以上所述仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术实施例可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。