技术特征:
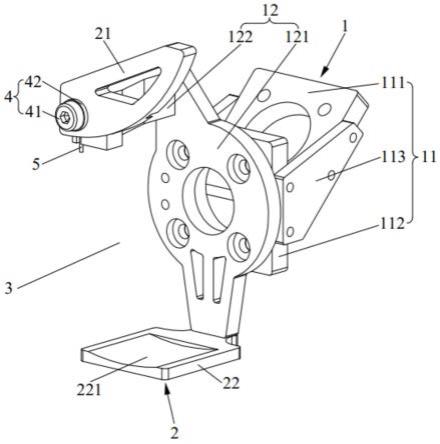
1.一种机械臂末端治具,其特征在于,包括:连接部(1),一侧用于与摘钩机器人的机械臂连接;推动部(2),连接在所述连接部(1)的另一侧并与所述连接部(1)配合形成容纳空间(3),所述容纳空间(3)用于至少容纳车钩提杆的自由端的部分,所述车钩提杆的自由端设置有自由端竖杆,所述推动部(2)包括第一推动件(21)和第二推动件(22);其中,所述第一推动件(21)被配置为能够跟随所述机械臂移动,并沿所述自由端竖杆的径向推动所述车钩提杆的自由端向上移动并转动;所述第二推动件(22)被配置为能够跟随所述机械臂移动,并沿所述自由端竖杆的轴向推动所述车钩提杆的自由端向上移动。2.根据权利要求1所述的机械臂末端治具,其特征在于,所述连接部(1)包括相连的连接架(11)和支承架(12),所述连接架(11)用于与所述机械臂连接,所述支承架(12)分别与所述第一推动件(21)和所述第二推动件(22)连接。3.根据权利要求2所述的机械臂末端治具,其特征在于,所述连接架(11)包括:第一连接板(111),用于与所述机械臂连接;第二连接板(112),连接在所述支承架(12)和所述第一连接板(111)之间,且所述第二连接板(112)相对所述第一连接板(111)呈预设角度倾斜设置。4.根据权利要求3所述的机械臂末端治具,其特征在于,所述预设角度为40
°‑
50
°
。5.根据权利要求2所述的机械臂末端治具,其特征在于,所述支承架(12)包括支承板(121)和支承梁(122),所述支承板(121)与所述连接架(11)固定连接;所述第一推动件(21)和所述第二推动件(22)均设置为推板,所述第一推动件(21)与所述支承板(121)相对间隔设置,所述支承梁(122)连接在所述第一推动件(21)与所述支承板(121)之间;所述第二推动件(22)与所述支承板(121)弯折连接形成l形结构,所述第二推动件(22)与所述第一推动件(21)间隔设置且相互垂直。6.根据权利要求1-5任一项所述的机械臂末端治具,其特征在于,所述车钩提杆的自由端还设置有自由端横杆,所述自由端横杆与所述自由端竖杆弯折连接;所述机械臂末端治具还包括转轴机构(4),所述第一推动件(21)通过所述转轴机构(4)与所述连接部(1)转动连接,所述第一推动件(21)被配置为能够在所述车钩提杆的自由端沿所述自由端竖杆的轴向移动时,与所述自由端横杆接触并受力转动,以避让所述自由端横杆。7.根据权利要求6所述的机械臂末端治具,其特征在于,所述机械臂末端治具还包括复位机构(5),所述复位机构(5)与所述第一推动件(21)连接,以在所述第一推动件(21)不受力时提供复位力。8.根据权利要求7所述的机械臂末端治具,其特征在于,所述转轴机构(4)包括塞打螺栓(41)和轴套(42),所述塞打螺栓(41)穿过所述第一推动件(21)与所述连接部(1)螺纹连接,所述轴套(42)安装在所述塞打螺栓(41)的光杆段和所述第一推动件(21)之间;所述复位机构(5)包括扭簧,所述扭簧套设在所述轴套(42)上,所述扭簧的两端分别与所述第一推动件(21)和所述连接部(1)连接。9.一种摘钩机器人,其特征在于,包括:机器人本体;机械臂,一端与所述机器人本体连接;
机械臂末端治具,为如权利要求1-8任一项所述的机械臂末端治具,所述机械臂末端治具与机械臂的另一端连接。10.一种火车摘钩方法,其特征在于,应用如权利要求9所述的摘钩机器人进行摘钩,所述火车摘钩方法包括以下步骤:s10,通过容纳空间(3)至少容纳车钩提杆的自由端的部分,若所述车钩提杆为上作用式车钩提杆,则执行步骤s20,若所述车钩提杆为下作用式车钩提杆,则执行步骤s30;s20,通过第一推动件(21)沿自由端竖杆的径向推动所述上作用式车钩提杆向上移动并转动,至完全提起锁销,实现摘钩;s30,通过第二推动件(22)沿自由端竖杆的轴向推动所述下作用式车钩提杆向上移动,至所述下作用式车钩提杆解锁;之后,通过所述第一推动件(21)沿自由端竖杆的径向推动所述下作用式车钩提杆向上移动并转动,至完全提起锁销,实现摘钩。
技术总结
本发明涉及火车摘钩技术领域,具体涉及一种机械臂末端治具、摘钩机器人及火车摘钩方法。该机械臂末端治具包括:连接部,一侧用于与摘钩机器人的机械臂连接;推动部,连接在连接部的另一侧并与连接部配合形成容纳空间,容纳空间用于至少容纳车钩提杆的自由端的部分,车钩提杆的自由端设置有自由端竖杆,推动部包括第一推动件和第二推动件。第一推动件能够跟随机械臂移动,沿自由端竖杆的径向推动车钩提杆的自由端向上移动并转动;第二推动件能够跟随机械臂移动,沿自由端竖杆的轴向推动车钩提杆的自由端向上移动。应用上述机械臂末端治具时,既可以对上作用式车钩进行摘钩,也可以对下作用式车钩进行摘钩,从而节省摘钩时间,提高卸货效率。高卸货效率。高卸货效率。
技术研发人员:周铁梁 熊振华 陶明 廖梓轩 柴子奇 张溧栗 梅迎春 杨英健
受保护的技术使用者:华电重工股份有限公司
技术研发日:2022.06.28
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。