1.本发明涉及机器人,具体涉及码垛机器人。
背景技术:
2.码垛机器人是机械与计算机程序有机结合的产物。为现代生产提供了更高的生产效率,码垛机器人在码垛行业有着相当广泛的应用,现有的码垛机器人无法在原地带动码垛物体旋转,并且现有的码垛机器人无法根据需要调节码垛物体的高度,使得码垛机器人工作效率较低。
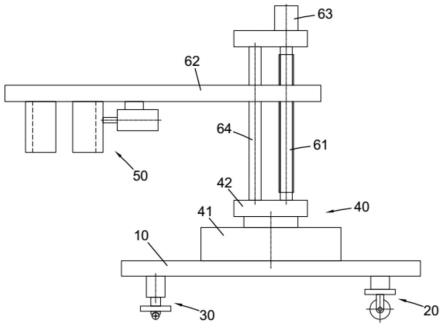
3.授权公告号为cn 216104881 u的专利文件公开了一种便于旋转和调节高度的码垛机器人,如图1,包括底座10,底座底部靠近右侧的位置设有移动机构20,底座底部靠近左侧的位置设有转向机构30,底座顶部中心处设有旋转机构40,旋转机构包括第三旋转电机41,第三旋转电机的输出轴同轴连接有底板42,底板顶部转动连接有螺纹杆61,螺纹杆螺纹连接有移动块62,移动块底部设有抓取机构50;该便于旋转和调节高度的码垛机器人,通过在旋转机构40中设置第三旋转电机41带动底板42转动,从而使得该装置可以在原地旋转调节码垛物体,通过在旋转机构40中设置第四旋转电机63带动螺纹杆61转动,从而带动移动块62移动,使得该装置可以根据需要调节码垛物体的高度,使得该装置的工作效率得到提高。
4.由于抓取机构位于整个码垛机器人的左侧,因此,码垛机器人抓取一些较重的物体时容易发生倾倒。为此,授权公告号为cn 216104881 u的专利文件在码垛机器人的右侧设置配重块。如此,存在如下技术问题:如果配重块过轻,码垛机器人抓取一些较重的物体时,还是容易向左侧发生倾倒;如果配重块过重,码垛机器人空载时,容易向右侧发生倾倒。
技术实现要素:
5.本发明所解决的技术问题:无论码垛机器人负载还是空载,如何避免其倾倒。
6.为解决上述技术问题,本发明提供如下技术方案:码垛机器人,包括底座、设置在底座底部的移动转向机构、设置在底座顶部的旋转机构、设置在旋转机构上的升降机构、设置在升降机构上的抓取机构,旋转机构的底部铰接在底座上,旋转机构的底部和底座顶部之间设有辅助支撑组件,底座的左侧设有螺杆驱动单元,螺杆驱动单元与螺杆配合,螺杆倾斜设置,螺杆的顶端能够与旋转机构的底部相抵,螺杆的底端能够与地面相抵。
7.移动转向机构用于驱动码垛机器人沿地面位移并转向。旋转机构用于驱动升降机构及升降机构上的抓取机构旋转,进而驱动被抓取机构抓取的物料旋转。升降机构用于驱动抓取机构及被抓取机构抓取的物料升降。
8.在抓取机构抓取物料前或抓取物料时,螺杆驱动单元驱动螺杆相对螺杆驱动单元线性位移,位移方向为左下方,螺杆的底端与地面相抵。此时,螺杆相当于底座延伸出的一条支撑腿,以防止码垛机器人在后续抓取物料时倾倒。之后,抓取机构抓取物料,由于螺杆的底端着地,因此,即使物料较重,码垛机器人也不会向左倾倒。
9.重要的是,在抓取机构抓取物料后,螺杆驱动单元驱动螺杆向右上方线性位移,螺杆的顶端将旋转机构的左侧抬升,旋转机构相对底座向右转动,旋转机构上的升降机构及抓取机构及物料也随之向右转动,如此,码垛机器人的重心右移。在重心右移的过程中,螺杆收起,不再支撑在地面上。即,螺杆收起与码垛机器人重心右移同步完成。之后,码垛机器人在移动转向机构的驱动下沿地面位移、转向,将物料移送至预定的位置,不会发生倾倒。
10.码垛机器人到达预定位置后,螺杆驱动单元驱动螺杆向左下方线性位移,螺杆的底端与地面相抵,同步地,旋转机构及其上的升降机构、抓取机构复位。复位过程中,由于螺杆的底端与地面相抵,因此,码垛机器人不会向左倾倒。之后,在升降机构的驱动下,抓取机构下料,将物料堆垛在地面上。
11.本发明的码垛机器人,在上料和下料过程中,由于螺杆着地支撑码垛机器人,因此,码垛机器人不会发生倾倒。在负载情况下位移过程中,由于重心位移,因此,码垛机器人也不会发生倾倒。
附图说明
12.下面结合附图对本发明做进一步的说明:
13.图1为现有技术中码垛机器人的示意图;
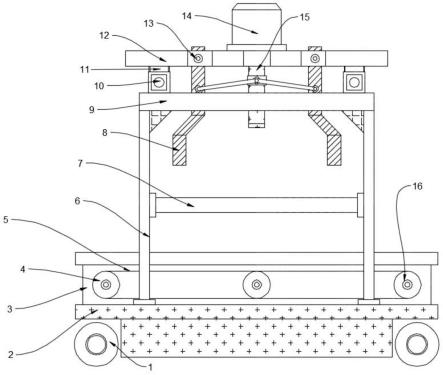
14.图2为本发明所述的码垛机器人的示意图;
15.图3为图2的俯视图;
16.图4为图2中螺杆70向右上方线性位移后的示意图。
17.图中符号说明:
18.10、底座;11、辅助支撑组件;112、套筒件;113、杆件;114、弹簧;12、铰接座;
19.20、移动机构;
20.30、转向机构;
21.40、旋转机构;41、第三旋转电机;42、底板;
22.50、抓取机构;51、液压缸;52、固定爪;53、移动爪;
23.60、升降机构;61、螺纹杆;62、移动块;63、第四旋转电机;64、导向杆;
24.70、螺杆;71、螺杆驱动单元;72、导向块。
具体实施方式
25.如图2,码垛机器人,包括底座10、设置在底座底部的移动转向机构、设置在底座顶部的旋转机构40、设置在旋转机构上的升降机构60、设置在升降机构上的抓取机构50,旋转机构的底部铰接在底座上,旋转机构的底部和底座顶部之间设有辅助支撑组件11,底座的左侧设有螺杆驱动单元71,螺杆驱动单元与螺杆70配合,螺杆倾斜设置,螺杆的顶端能够与旋转机构40的底部相抵,螺杆的底端能够与地面相抵。
26.移动转向机构用于驱动码垛机器人沿地面位移并转向。移动转向机构包括移动机构20和转向机构30。移动机构20设置在底座底部靠近右侧的位置。转向机构30设置在底座底部靠近左侧的位置。转向机构用于控制码垛机器人位移的方向,移动机构用于驱动码垛机器人位移。
27.旋转机构40设置在底座10顶部中心处,旋转机构包括第三旋转电机41,第三旋转
电机的输出轴同轴连接有底板42,底板顶部转动连接有螺纹杆61,螺纹杆螺纹连接有移动块62,移动块与导向杆64配合,移动块底部设有抓取机构50。
28.第三旋转电机41驱动动底板42转动,以旋转调节升降机构60、抓取机构50的位置,使抓取机构与待抓取的物料上下对齐,便于抓取机构50顺利抓取物料。
29.通过在旋转机构40中设置第四旋转电机63驱动螺纹杆61转动,从而驱动移动块62升降,进而驱动抓取机构50升降,抓取机构抓取物料后上升。
30.结合图2、图4,在抓取机构50抓取物料前或抓取物料时,螺杆驱动单元71驱动螺杆70相对螺杆驱动单元线性位移,位移方向为左下方,螺杆70的底端与地面相抵。之后,抓取机构50抓取物料,由于螺杆70的底端着地,因此,即使物料较重,码垛机器人也不会向左倾倒。
31.在抓取机构50抓取物料后,螺杆驱动单元71驱动螺杆70向右上方线性位移,螺杆的顶端将旋转机构40的第三旋转电机41的左侧抬升,旋转机构相对底座10向右转动,旋转机构上的升降机构60及抓取机构50及物料也随之向右转动,如此,码垛机器人的重心右移。在重心右移的过程中,螺杆70收起,不再支撑在地面上。之后,码垛机器人在移动转向机构的驱动下沿地面位移、转向,将物料移送至预定的位置,不会发生倾倒。
32.码垛机器人到达预定位置后,螺杆驱动单元71驱动螺杆70向左下方线性位移,螺杆70的底端与地面相抵,同步地,旋转机构40及其上的升降机构60、抓取机构50复位。复位过程中,由于螺杆70的底端与地面相抵,因此,码垛机器人不会向左倾倒。之后,在旋转机构40的驱动下,调整抓取机构50抓取的物料的位置,使该物料与地面上的物料上下对齐。之后,在升降机构60的驱动下,抓取机构50下料,将物料堆垛在地面上。
33.螺杆驱动单元71为固定在底座10上的电机,电机包括定子和转子,转子的中心设有螺纹孔,螺杆70配合在所述螺纹孔中并穿过所述转子。电机的一端设有导向块72,螺杆70的侧壁上开设轴向的导向槽,导向槽与导向块配合。如此,在转子的驱动下以及导向块72的导向下,螺杆70相对螺杆驱动单元71作线性位移。
34.底座10上设有铰接座12,旋转机构40的底部铰接在所述铰接座上。
35.辅助支撑组件11位于铰接座12的右侧,包括铰接在底座10上的套筒件112、配合在套筒件中的杆件113,杆件的顶端与旋转机构40的底部铰接,杆件上套设有弹簧114。螺杆70抬升旋转机构40的左侧,旋转机构的右侧下降,杆件113在套筒件112中位移,弹簧114被压缩。螺杆70向左下方位移时,在弹簧114的作用下,旋转机构40复位。
36.如图3,螺杆70的数量为一对,一对螺杆设置在底座10左侧的前后侧,每一螺杆配合有一螺杆驱动单元71。如此布局,一对螺杆70不会妨碍码垛机器人接近待抓取的物料,也不会妨碍码垛机器人将抓取的物料堆垛在地面上。
37.以上内容仅为本发明的较佳实施方式,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。