技术特征:
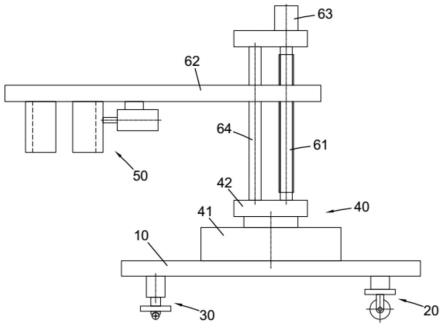
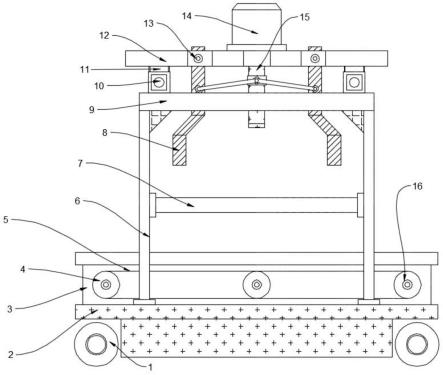
1.码垛机器人,包括底座(10)、设置在底座底部的移动转向机构、设置在底座顶部的旋转机构(40)、设置在旋转机构上的升降机构(60)、设置在升降机构上的抓取机构(50),其特征在于:旋转机构的底部铰接在底座上,旋转机构的底部和底座顶部之间设有辅助支撑组件(11),底座的左侧设有螺杆驱动单元(71),螺杆驱动单元与螺杆(70)配合,螺杆倾斜设置,螺杆的顶端能够与旋转机构(40)的底部相抵,螺杆的底端能够与地面相抵。2.如权利要求1所述的码垛机器人,其特征在于:螺杆驱动单元(71)为固定在底座(10)上的电机,电机的转子的中心设有螺纹孔,螺杆(70)配合在所述螺纹孔中并穿过所述转子。3.如权利要求1所述的码垛机器人,其特征在于:底座(10)上设有铰接座(12),旋转机构(40)的底部铰接在所述铰接座上。4.如权利要求1所述的码垛机器人,其特征在于:辅助支撑组件(11)包括铰接在底座(10)上的套筒件(112)、配合在套筒件中的杆件(113),杆件的顶端与旋转机构(40)的底部铰接,杆件上套设有弹簧(114)。5.如权利要求1所述的码垛机器人,其特征在于:螺杆(70)的数量为一对,一对螺杆设置在底座(10)左侧的前后侧,每一螺杆配合有一螺杆驱动单元(71)。
技术总结
本发明公开了码垛机器人,包括底座、设置在底座底部的移动转向机构、设置在底座顶部的旋转机构、设置在旋转机构上的升降机构、设置在升降机构上的抓取机构,旋转机构的底部铰接在底座上,底座的左侧设有螺杆驱动单元与螺杆配合,螺杆倾斜,螺杆的顶端能够与旋转机构的底部相抵,螺杆的底端能够与地面相抵。在抓取机构抓取物料时,螺杆驱动单元驱动螺杆位移,螺杆的底端与地面相抵,以防止码垛机器人倾倒。在抓取物料后,螺杆向右上方线性位移,螺杆的顶端将旋转机构的左侧抬升,旋转机构相对底座向右转动,旋转机构上的升降机构及抓取机构及物料也随之向右转动,如此,码垛机器人的重心右移,不会发生倾倒。不会发生倾倒。不会发生倾倒。
技术研发人员:张永俊
受保护的技术使用者:苏州巨亿亚金属制品有限公司
技术研发日:2022.06.28
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。