1.本发明属于航空发动机仿真与控制领域,具体涉及一种面向进气畸变的进气道/发动机多变量协同控制方法。
背景技术:
2.进气流场畸变经常出现在飞机爬升或下降以及面临各种恶劣复杂的工作环境时,此时如果进气道的流量能够与发动机匹配,发动机就可以保持正常工作的状态。而常规的进气道控制与发动机控制相互独立,很难实现进气道与发动机的共同高效调节。因此,为了保证进气畸变下进气道与发动机之间始终良好匹配,须在进气道/发动机一体化数学模型的基础上,考虑进气道和发动机之间的耦合作用,设计出可靠的进气道/发动机多变量协同控制系统。
3.线性二次型最优控制(linear quadratic regulator,lqr)是指研究系统为线性,所取性能指标为状态变量和控制变量的二次型函数时,动态系统的最优化控制问题。而ilqr算法(iterative linear quadratic regulator)是一种基于模型的强化学习算法,属于微分动态规划。其中,计算获得的结果为最优行动对于当前行动的偏差,在更新时需进行多轮迭代。该算法可有效克服模型的不确定性等问题,在倒立摆的控制上能取得优良效果。
4.当飞机在高空超音速飞行时,进气道的工作状态常常为深度亚临界状态,进气道易出现起动问题,在进气畸变下尤为明显。处于该状态时若采用进气道放气等手段减少进气道流量,以此来调节结尾正激波的位置,就可大幅改善进气道和发动机之间的流量匹配状况。因此,若采用控制跟踪性能优良的ilqr算法并将能够反映结尾正激波位置的进/发共同工作点位置纳入到控制器设计中,能够提升推进系统的性能。
5.而目前常用的普通lqr控制方法有一定的局限性,这种控制算法一次性输出整条的控制轨迹,并且全部作用于发动机系统,欠缺了动态的控制优化过程,未考虑重新实时收集反馈信息,对控制系统的控制精度和鲁棒性造成了一定的影响,需要进行一定改进。
6.因此,设计高效稳定的进气道/发动机多变量ilqr控制器,协同进气道和发动机进行调节,在进气畸变干扰时依旧保持推进系统处于安全可靠的工作状态很有必要。
技术实现要素:
7.本发明所要解决的技术问题是针对背景技术的缺陷,提出了基于线性模型的滚动优化ilqr算法设计控制律,将进气道/发动机共同工作点增广到控制器设计的状态量中,建立面向进气畸变的涡扇进气道/发动机高压转速、压比多变量控制器,实现对进/发的多变量协同调节,能够解决模型的不确定性问题,改善进气畸变干扰引起的性能下降,仿真表明该控制器具有良好的稳态和动态性能,并能在进气畸变下使进气道不进入失稳状态,可显著降低发动机推力的损失。
8.本发明为解决上述技术问题采用以下技术方案:
9.一种面向进气畸变的进气道/发动机多变量协同控制方法,包括以下步骤:
10.步骤a),推导基于线性模型的ilqr算法,并引入滚动优化,仅将第一个控制量输出。
11.步骤b),利用推导的控制律,以发动机状态向量与控制向量为二次型性能指标,建立面向进气畸变的进气道/发动机一体化多变量协同控制器,并对控制器的稳态和动态性能进行验证。
12.作为本发明一种面向进气畸变的进气道/发动机多变量协同控制方法进一步的优化方案,步骤a)的具体步骤如下:
13.步骤a1),定义基于线性模型的ilqr算法的损失函数和状态转移函数;
14.步骤a2),反向计算迭代求取整个预测周期内的控制器增益参数,利用求解出的控制器增益参数前向计算预测周期内最优的控制序列;
15.步骤a3),引入模型预测控制算法中的滚动优化的思想,将lpv模型作为预测模型,求解出该时刻起有限时域内的最优控制序列,但仅将序列中当前时刻控制量输出作用于系统。
16.作为本发明一种面向进气畸变的进气道/发动机多变量协同控制方法进一步的优化方案,步骤b)具体步骤如下:
17.步骤b1),基于面向进气畸变的进气道/发动机耦合机理,选取控制变量和被控变量,并将进/发共同工作点位置增广至状态量中,利用带有执行机构的发动机增广模型推导出基于lpv模型的多变量ilqr控制器的损失函数、状态转移函数及控制律;
18.步骤b2),根据进气道/发动机状态向量与控制向量建立二次型性能指标,以该指标最小为目标对控制量进行在线滚动优化,设计面向进气畸变的进气道/发动机多变量协同ilqr控制器;
19.步骤b3),进/发多变量协同ilqr控制器设计后,以进/发常规控制器为参照,对进气畸变下的工作点进行性能验证。
20.本发明采用以上技术方案与现有技术相比,具有以下技术效果:
21.(1)本发明提出的一种面向进气畸变的进气道/发动机多变量协同控制方法,将进气道/发动机共同工作点位置纳入到控制器设计中,能够建立进气道/发动机耦合多变量闭环控制系统,实现综合调节进气道和发动机,在进气畸变干扰时保持推进系统安全稳定地工作,提高发动机的性能;
22.(2)本发明提出的一种进气道/发动机多变量协同控制器,可以稳定跟踪任意指令,计算速度较快,具有良好的稳态和动态性能,能够克服模型的不确定性问题,改善进气畸变干扰引起性能下降,验证了该控制方法的有效性。
附图说明
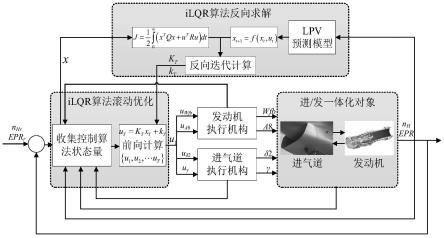
23.图1是一种面向进气畸变的进气道/发动机多变量协同控制方法结构图;
24.图2是一种面向进气畸变的进气道/发动机多变量协同控制器设计流程图;
25.图3是基于线性模型的ilqr算法具体过程图;
26.图4是基于lpv模型的滚动优化ilqr算法具体过程图;
27.图5是高空点h=15km,ma=1.8时受到进气条件扰动的进气攻角和总压畸变指数变化图;
28.图6是高空点h=15km,ma=1.8时受到进气条件扰动的输出转速跟踪响应图;
29.图7是高空点h=15km,ma=1.8时受到进气条件扰动的输出压比跟踪响应图;
30.图8是高空点h=15km,ma=1.8时受到进气条件扰动的进/发共同工作点位置变化图;
31.图9是高空点h=15km,ma=1.8时受到进气条件扰动的有效推力变化图;
32.图10是高空点h=17km,ma=1.6时受到进气条件扰动的进气攻角和总压畸变指数变化图;
33.图11是高空点h=17km,ma=1.6时受到进气条件扰动的输出转速跟踪响应图;
34.图12是高空点h=17km,ma=1.6时受到进气条件扰动的输出压比跟踪响应图;
35.图13是高空点h=17km,ma=1.6时受到进气条件扰动的进/发共同工作点位置变化图;
36.图14是高空点h=17km,ma=1.6时受到进气条件扰动的有效推力变化图。
具体实施方式
37.下面结合附图对本发明的技术方案做进一步的详细说明。
38.本发明的思路是首先推导出基于线性模型的滚动优化ilqr算法,包括定义损失函数和状态转移函数、反向计算迭代求取整个预测周期内的控制器增益参数、利用求解出的控制器参数前向计算预测周期内最优控制序列。针对在进气畸变干扰下进气道/发动机多变量协同控制的要求,以进气道/发动机一体化数学模型为基础,将进气道/发动机共同工作点增广到控制器设计的状态量中,通过推导出的ilqr多变量控制律,结合模型预测控制中的滚动优化概念,建立多变量协同控制器。相比于传统的进/发常规控制器,该控制器能够通过第二级斜板和辅助放气门有效调节进/发共同工作点位置,调整进气道工作状态及结尾正激波,提高在进气畸变下的发动机性能。相比于其他多变量控制方法,该控制方法跟踪效果良好,计算速度较快,克服了模型的不确定性问题,改善了环境干扰引起性能下降。
39.本发明的具体实施方式以某型涡扇发动机的高压转速及压比多变量协同ilqr控制器设计为例,其控制方法结构如图1所示,设计流程如图2所示,该进气道/发动机多变量协同控制方法包括以下步骤:
40.步骤a),推导基于线性模型的ilqr算法,并引入滚动优化,仅将第一个控制量输出。
41.步骤b),利用推导的控制律,以发动机状态向量与控制向量为二次型性能指标,建立面向进气畸变的进气道/发动机一体化多变量协同控制器,并对控制器的稳态和动态性能进行验证。
42.其中步骤a)的详细步骤如下:
43.步骤a1),ilqr算法状态转移函数为:
44.x
t 1
=f(x
t
,u
t
)
45.式中,x
t
代表系统当前时刻的状态,u
t
代表当前时刻的控制量,x
t 1
则代表系统下一时刻的状态。
46.算法以最小化长期损失为目标:
[0047][0048]
式中,c(x1,u1)代表初始状态x1下执行控制量u1时产生的损失,其在预测周期t内执行控制序列{u1,u2,
…ut
}所产生的损失和为q,代表整个周期的长期损失。
[0049]
因此目标函数也可写为:
[0050][0051]
初始状态x1已知,在状态转移函数确定的情况下,目标函数为关于控制序列{u1,u2,
…ut
}的函数。
[0052]
控制策略π定义为状态到控制量的映射,t时刻某个状态x
t
的状态价值函数定义为在该状态x
t
=s时按照控制策略π进行控制决策所获得的长期损失期望值:
[0053]
v(x
t
)=e
π
[c(x
t
,u
t
) c(x
t 1
,u
t 1
)
…
c(x
t
,u
t
)|x
t
=s]
[0054]
t时刻某个状态x
t
的动作价值函数定义为在该状态x
t
=s时取某个控制量u
t
=a后控制策略π进行控制决策所获得的长期损失期望值:
[0055]
q(x
t
,u
t
)=e
π
[c(x
t
,u
t
) c(x
t 1
,u
t 2
)
…
c(x
t
,u
t
)|x
t
=s,u
t
=a]
[0056]
基于线性模型的ilqr算法,其损失函数定义为一个二次函数,状态转移函数定义为一个一次函数:
[0057][0058][0059]
式中,f=[f
x fu],f为状态转移函数的待定系数矩阵,c
xx
,c
xu
,c
ux
,c
uu
分别为损失函数的二次项系数矩阵,c
x
,cu分别为损失函数的一次项系数矩阵,f
x
,fu分别为状态转移函数的一次项系数矩阵。
[0060]
目标函数为:
[0061][0062]
步骤a2),为了求得使长期损失最小的控制序列{u1,u2,
…ut
},进行偏导求解是可行方法之一,但其运算量极大,并且每一时刻的控制量的偏导都不相同,因此考虑进行反向迭代计算求取整个预测周期内最优的控制序列,具体过程如图3所示。
[0063]
步骤a21),首先,若预测周期为t,求解使t时刻的动作价值函数q(x
t
,u
t
)最低的控制量u
t
:
[0064]
在t=t时刻通过当前时刻的动作价值函数q(x
t
,u
t
)对u
t
求导并令导数为0时得到:
[0065][0066][0067]ut
=-c
xu-1
(c
xut
x
t
c
ut
)
[0068]
使用变量k
t
和k
t
来代替控制量的表达式,得到:
[0069][0070]
于是有:
[0071]ut
=k
t
x
t
k
t
[0072]
步骤a22),用x
t
替换u
t
,得到关于x
t
的状态价值函数v(x
t
):
[0073]
于是x
t
的状态价值函数为:
[0074][0075]
对公式中的变量进行替换:
[0076][0077]
得到:
[0078][0079]
步骤a23),求出t-1时刻的动作价值函数q(x
t-1
,u
t-1
),并将x
t
替换为x
t-1
和u
t-1
的函数:t-1时刻的动作价值函数为:
[0080][0081]
其中v(f(x
t-1
,u
t-1
))可展开为:
[0082]
[0083]
用变量来代替后可得:
[0084]qt-1
=c f
tvtf[0085]qt-1
=c f
tvt
f f
tvt
[0086]
于是有:
[0087][0088]
之后将时刻t替换为t-1,重复此步骤直到求解完整个周期的参数。
[0089]
步骤a24),最后通过求解出的参数k
t
和k
t
根据下式前向计算控制序列{u1,u2,
…ut
}:
[0090]ut
=k
t
x
t
k
t
。
[0091]
步骤a3),引入模型预测控制方法中滚动优化的概念,将lpv模型作为预测模型,针对目标函数进行在线滚动优化,仅将求解出的预测周期内控制序列中的首个控制量输出作用于系统中,形成全局动态优化的控制效果。
[0092]
步骤b)的详细步骤如下:
[0093]
步骤b1),航空发动机工作在宽广的飞行包线内,工作环境经常会面临恶劣复杂的状况,进气道出口流场从而极易产生畸变。而当飞机在爬升或下降的过程中,往往会产生攻角,随着攻角的改变,进气道的出口总压畸变程度也会产生相应的改变。在进气畸变情况下,进气道的工作状态会偏离临界状态,为了保证进气道和发动机流量始终匹配良好,需要设计出可靠的进气道/发动机多变量协同控制系统。
[0094]
基于进气道/发动机耦合机理对进气道可控参数进行研究,取航空发动机状态x=[n
h n
l
]
t
,依次为高压转速及低压转速,控制变量u=[w
fb a
8 δ
2 γ]
t
,依次为燃油流量、尾喷管临界截面面积、进气道的第二级斜板及辅助放气门角度,输出y=[n
h epr]
t
,依次为高压转速及压比,则发动机小偏差增量模型为:
[0095][0096]
式中,a、b、c、d、e、f为系统的状态空间矩阵,δx为进/发共同工作点位置变化量。
[0097]
进/发共同工作点实际位置为:
[0098][0099]
x=x0 δx
[0100]
式中,和σ
in
分别代表进气道的喉道流量系数和总压恢复系数,和σ0分别代表临界状态进/发共同工作点的喉道流量系数和总压恢复系数,x0为该稳态点所对应的进/发共同工作点位置。
[0101]
进气道和发动机的共同工作点是一个能反映进气道工作状态的虚构变量,当进/发共同工作点位于不同位置时,进气道处于不同的状态,共同工作点位置x小于0、等于0或大于0表示进气道分别处于亚临界状态、临界状态或超临界状态。同时,在亚音速情况下,进气道和发动机的共同工作点仅反映进气道的工作状态;在超音速情况下,共同工作点的位
置还反映了进气道内最后一道正激波的位置,具有其物理意义。由于进气道流场可能存在畸变的情况下,因此没有选择常规的进气道总压恢复系数作为被控量,而选择能代表进气道工作状态的进/发共同工作点作为控制器设计的重要参数。
[0102]
考虑燃油流量控制装置和作动筒的特性,执行机构的状态空间方程为:
[0103][0104]
式中,az、bz为执行机构的状态空间矩阵。
[0105]
将控制变量增广到发动机模型中形成带有执行机构的发动机增广模型:
[0106][0107]
式中,x
p
=[δn
h δn
l δw
fb δa
8 δδ
2 δγ]
t
,y
p
=δy,x
p
=δx,c
p
=[c d],d
p
=0,e
p
=[e f],f
p
=0。
[0108]
对该系统微分得到:
[0109][0110]
而对于指令的误差信号有:
[0111][0112]
式中,代表指令输入的一阶微分。
[0113]
共同工作点位置为:
[0114][0115]
当发动机面临进气畸变时,为了保证进气道与发动机的流量保持匹配,始终安全可靠地工作,希望进/发共同工作点位置在偏离临界状态后迅速返回到临界状态即x=0,因此考虑将其增广进控制器设计的状态量中,将状态向量x
p
进一步地增广为得到:
[0116]
[0117]
即:
[0118][0119]
式中,
[0120]
离散化为:
[0121][0122]
式中,分别为连续系统状态方程离散化之后x
t
,u
t
,对应的系数矩阵,代表当前时刻指令输入的一阶微分。
[0123]
损失函数定义为二次型性能指标:
[0124][0125]
式中,q,r分别为二次型性能指标泛函中的状态向量加权系数矩阵和控制向量加权系数矩阵,取为对角矩阵。
[0126]
状态转移函数则定义为:
[0127][0128]
需要根据调度参数插值出当前的lpv模型,得到当前状态对应的状态转移函数。
[0129]
其中,控制律为:
[0130][0131]
式中,为状态量e,x对应的控制器增益。
[0132]
因此,有:
[0133][0134]
步骤b2),结合传统ilqr算法和模型预测控制算法中的滚动优化概念,将lpv模型作为预测模型,建立发动机状态向量与控制向量的二次型性能指标,以该指标尽可能小为
目标重复在线优化,在线求出此刻起有限控制时域内的最优控制律,优化时域随着时间的推进不断地向前滚动,从而形成在线滚动优化,具体过程如图4所示。
[0135]
其性能指标为:
[0136][0137]
建立涡扇进气道/发动机多变量协同控制结构如图1所示,该控制结构首先需要根据调度参数插值出当前的lpv模型,得到当前状态对应的状态转移函数,在预测时域内根据反向计算迭代求解出使得性能指标最小化的控制序列和控制器参数,并仅将第一个控制量输入到进气道/发动机一体化对象中,并且在下一时刻重复该过程进行重新规划,形成了滚动优化。
[0138]
步骤b3),进气道/发动机多变量协同ilqr控制器设计后,以进气道和发动机独立控制的进/发常规控制器为参照对比,对进气畸变下的工作点进行性能验证。
[0139]
进气道出口流场的均匀程度一般采用进气道的出口畸变指数进行表征,其意义为进气道出口总压的最大差值与出口总面积平均的总压之比值。
[0140]
飞机处于爬升或下降过程时,进气攻角产生变化往往引起进气道出口畸变指数的变化,因此设高空点h=15km,ma=1.8时发动机受到进气条件扰动的进气攻角(attackangle)和总压畸变指数(dp)变化如图5所示,在10s时给予高压转速和压比阶跃型指令,在20s时给予攻角和总压畸变指数变化,在35s时恢复。受到该种进气条件扰动影响,高空点h=15km,ma=1.8状态下跟踪高压转速和压比阶跃型指令的仿真结果对比如图6、7、8、9所示。
[0141]
飞机在宽广的飞行包线内工作时,很可能会面临恶劣复杂的环境,受到进气畸变的影响,因此设高空点h=17km,ma=1.6时发动机受到进气条件扰动的进气攻角(attackangle)和总压畸变指数(dp)变化如图10所示,在10s时给予高压转速和压比阶跃型指令,在20s时仅给予总压畸变指数变化,在35s时恢复。受到该种进气条件扰动影响,高空点h=17km,ma=1.6状态下跟踪高压转速和压比阶跃型指令的仿真结果对比如图11、12、13、14所示。
[0142]
由图可知,两种控制方案下,高压转速及压比能够在不同高空点稳定跟踪指令阶跃信号,不存在稳态误差,其动态性能对比如表1所示。根据仿真结果得到,相比于进/发常规控制方案,进/发多变量协同控制方案跟踪指令阶跃信号的高压转速动态响应更优,其受到进气条件扰动信号的影响较小,恢复时间较快,压比超调量更低,而压比调节时间两者相近,其受到进气条件扰动信号的恢复时间略微变长,这是因为控制器为了调整进/发共同工作点位置在一定程度上牺牲了动态性能。总体来看,进/发多变量协同控制器具有良好的稳态和动态跟踪性能。
[0143]
表1不同高空工作点控制方案动态性能对比
[0144][0145]
由于进/发常规控制未考虑进气道控制和发动机控制之间的耦合关系以及进气畸变对发动机带来的影响,这使得进/发共同工作点位置偏离临界状态,进气道与发动机流量不匹配,进气道总压恢复系数下降,引起发动机有效推力大幅下降。而设计的面向进气畸变的进/发多变量协同控制器将进/发共同工作点位置增广进算法状态量,实时对第二级斜板及辅助放气门角度等滚动优化,如图8、图13所示有效调整共同工作点处于临界状态,确保了进气道供给流量与发动机相匹配,虽然压比受进气扰动的恢复时间略微增加,但显著降低了进气畸变引起的推力损失。如图9、图14所示,在相应进气畸变影响下,h=15km,ma=1.8时推力损失原推力水平的13.12%,而进/发常规控制器损失原推力水平的24.16%;h=17km,ma=1.6时推力损失原推力水平的12.26%,而进/发常规控制器损失原推力水平的16.58%。
[0146]
由此可见,进/发多变量协同控制器能够实现进气道/发动机多变量控制的要求,具有良好的控制品质,可以适应发动机的各种进气工况的变化,高效保持进气道工作状态,在进气畸变下不进入失稳状态,保证推进系统可靠安全地运行。
[0147]
需要指出的是,以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化和替换,都应涵盖在本发明的保护范围内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。