技术特征:
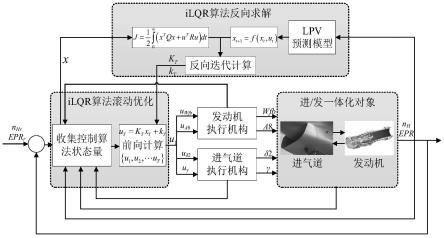
1.一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,包括以下步骤:步骤a),推导基于线性模型的ilqr算法,并引入滚动优化,仅将第一个控制量输出;步骤b),利用推导的控制律,以发动机状态向量与控制向量为二次型性能指标,建立面向进气畸变的进气道/发动机一体化多变量协同控制器,并对控制器的稳态和动态性能进行验证。2.如权利要求1所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤a)的具体步骤如下:步骤a1),定义基于线性模型的ilqr算法的损失函数和状态转移函数;步骤a2),反向计算迭代求取整个预测周期内的控制器增益参数,利用求解出的控制器增益参数前向计算预测周期内最优的控制序列;步骤a3),引入模型预测控制算法中的滚动优化的思想,将lpv模型作为预测模型,求解出该时刻起有限时域内的最优控制序列,但仅将序列中当前时刻控制量输出作用于系统。3.如权利要求1所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤b)的具体步骤如下:步骤b1),基于面向进气畸变的进气道/发动机耦合机理,选取控制变量和被控变量,并将进/发共同工作点位置增广至状态量中,利用带有执行机构的发动机增广模型推导出基于lpv模型的多变量ilqr控制器的损失函数、状态转移函数及控制律;步骤b2),根据进气道/发动机状态向量与控制向量建立二次型性能指标,以该指标最小为目标对控制量进行在线滚动优化,设计面向进气畸变的进气道/发动机多变量协同ilqr控制器;步骤b3),进/发多变量协同ilqr控制器设计后,以进/发常规控制器为参照,对进气畸变下的工作点进行性能验证。4.如权利要求2所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤a1)中基于线性模型的ilqr算法的损失函数、状态转移函数为:lqr算法的损失函数、状态转移函数为:式中,x
t
代表系统当前时刻的状态,u
t
代表当前时刻的控制量,x
t 1
则代表系统下一时刻的状态,f=[f
x f
u
],f为状态转移函数的待定系数矩阵,c
xx
,c
xu
,c
ux
,c
uu
分别为损失函数的二次项系数矩阵,c
x
,c
u
分别为损失函数的一次项系数矩阵,f
x
,f
u
分别为状态转移函数的一次项系数矩阵;目标函数为:式中,c(x1,u1)代表初始状态x1下执行控制量u1时产生的损失,其在预测周期t内执行控
制序列{u1,u2,
…
u
t
}所产生的损失和为q,代表整个周期的长期损失。5.如权利要求4所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤a2)包括:步骤a21),首先,若预测周期为t,求解使t时刻的动作价值函数q(x
t
,u
t
)最低的控制量u
t
:在t=t时刻通过当前时刻的动作价值函数q(x
t
,u
t
)对u
t
求导并令导数为0时得到:求导并令导数为0时得到:u
t
=-c
xu-1
(c
xut
x
t
c
ut
)使用变量k
t
和k
t
来代替控制量的表达式,得到:于是有:u
t
=k
t
x
t
k
t
步骤a22),用x
t
替换u
t
,得到关于x
t
的状态价值函数v(x
t
):于是x
t
的状态价值函数为:对公式中的变量进行替换:得到:步骤a23),求出t-1时刻的动作价值函数q(x
t-1
,u
t-1
),并将x
t
替换为x
t-1
和u
t-1
的函数:t-1时刻的动作价值函数为:
其中v(f(x
t-1
,u
t-1
))可展开为:用变量来代替后可得:q
t-1
=c f
tvt
fq
t-1
=c f
tvt
f f
t
v
t
于是有:之后将时刻t替换为t-1,重复此步骤直到求解完整个周期的参数;步骤a24),最后通过求解出的参数k
t
和k
t
根据下式前向计算控制序列{u1,u2,
…
u
t
}:u
t
=k
t
x
t
k
t
。6.如权利要求3所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤b1)中控制变量包括:燃油流量w
fb
、尾喷管临界截面面积a8、进气道的第二级斜板角度δ2及辅助放气门角度γ;被控变量即输出包括:高压转速n
h
及压比epr。7.如权利要求3所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤b1)中增广至控制器设计的状态量的进/发共同工作点实际位置为:x=x0 δx式中,和σ
in
分别代表进气道的喉道流量系数和总压恢复系数,和σ0分别代表临界状态进/发共同工作点的喉道流量系数和总压恢复系数,x0为该稳态点所对应的进/发共同工作点位置;进/发共同工作点位置x小于0、等于0或大于0表示进气道分别处于亚临界状态、临界状态或超临界状态。8.如权利要求3所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤b1)中建立的损失函数为:
式中,q,r分别为二次型性能指标泛函中的状态向量加权系数矩阵和控制向量加权系数矩阵,取为对角矩阵;状态转移函数为:式中,分别为连续系统状态方程离散化之后x
t
,u
t
,对应的系数矩阵,代表当前时刻指令输入的一阶微分;控制律为:式中,为进/发多变量协同控制器设计的状态向量x,x
p
=[δn
h δn
l δw
fb δa
8 δδ
2 δγ]
t
,n
l
为低压转速,e=r-y,r代表指令输入,y=[n
h epr]
t
,x为进/发共同工作点实际位置,为状态量e,x对应的控制器增益。9.如权利要求3所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,步骤b2)中建立的二次型性能指标为:式中,进/发多变量协同控制器设计的状态向量控制向量控制向量10.如权利要求3所述的一种面向进气畸变的进气道/发动机多变量协同控制方法,其特征在于,所述多变量协同ilqr控制器得到每一时刻的被控量指令后,反向计算迭代求取整个预测周期内的控制器增益,利用求解出的控制器参数前向计算预测周期内最优的控制序列,但仅输入第一个控制量至进气道/发动机一体化对象中,结合状态量和控制量的二次型性能指标对控制量进行在线滚动优化,并将进气道/发动机共同工作点位置增广进状态
量中,以实现进气道/发动机多变量协同控制,能够保证推进系统在进气畸变下安全可靠工作。
技术总结
本发明公开一种面向进气畸变的进气道/发动机多变量协同控制方法,包括:推导基于线性模型的iLQR算法,在其基础上引入滚动优化仅输出首个控制量;利用该控制律,结合面向进气畸变的进气道/发动机耦合原理,设计进/发多变量闭环控制器,并对系统的性能进行研究。本发明将模型预测控制的思想应用于普通iLQR算法,以进/发状态量与控制量为二次型性能指标,并将进/发共同工作点位置增广进状态量中,对燃油流量、尾喷管临界截面面积、第二级斜板及辅助放气门角度进行控制,设计面向进气畸变的进/发一体化多变量协同控制器,该方法通过依时间迭代计算的方式在线规划解算,形成全局动态优化,解决模型不确定性问题,改善进气畸变造成性能下降。性能下降。性能下降。
技术研发人员:鲁峰 彭逸 唐杰 周鑫 黄金泉
受保护的技术使用者:南京航空航天大学
技术研发日:2022.05.24
技术公布日:2022/9/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。