1.本发明涉及太阳光照明技术领域,具体涉及一种独立可调的光纤太阳光照明模块、系统及轨迹方法。
背景技术:
2.光纤太阳光照明是利用太阳能作为能源,直接把太阳光引入室内进行照明的一种技术,其需要光纤系统进行分光照明,由于是清洁能源,这样的照明方式值得推广。
3.现有的照明装置均能够完成良好的照明采集功能,但是通过对技术的研究,发现现有的技术方案存在至少以下问题:
4.一、在一些特殊的安装场所,整体机器摆动可能受限,不能完整跟踪全天太阳轨迹时,比如挂在墙壁上的壁挂式太阳光跟踪设备,左右上下摆动幅度有时不能太大,从而导致现有结构使用时间段大大缩小。
5.二、由于机械加工的导致的光学积累误差,传统方案下,无法保证每个镜片的汇聚光斑均能耦合进入每一根光纤个,从而导致现有结构的采集效率大大降低。
技术实现要素:
6.本发明要解决的技术问题是提供一种独立可调的光纤太阳光照明模块、系统及轨迹方法,使用场地不受限制,采集效率也能够有效提高。
7.为了解决上述技术问题,本发明提供了一种独立可调的光纤太阳光照明模块,包括镜筒,所述镜筒底部设置有光纤,所述镜筒顶部设置有透镜,所述镜筒外周上设置有太阳追踪传感器,所述镜筒固定在电动云台上。
8.进一步的,所述镜筒内壁上设置有凸台,所述凸台与镜筒内壁配合形成支撑安装平台,所述透镜周边搭设并固定在支撑安装平台上。
9.进一步的,所述透镜外周上设置有安装凸部,所述安装凸部搭设并固定在支撑安装平台上。
10.进一步的,所述太阳追踪传感器固定在安装架上,所述安装架表面设置有球形凸部,所述球形凸部对应的镜筒表面设置有球形凹部,所述球形凸部与球形凹部配合定位并通过焊接固定,所述球形凸部的半径小于球形凹部的半径。
11.进一步的,所述镜筒上开设有减重孔。
12.一种照明系统,包括太阳跟踪装置以及设置在太阳跟踪装置上的采集装置,所述采集装置内设置有多个上述所述的照明模块。
13.进一步的,还包括安装底板,所述安装底板上设置有调节避让过孔,所述照明模块的电动云台与安装底板背面固定,所述照明模块的镜筒穿过调节避让过孔至安装底板表面一侧。
14.一种轨迹方法,基于上述的照明系统,包括以下步骤:
15.步骤1)初始化系统;
16.步骤2)判断gps或北斗信号是否接收正常,未接收到gps或北斗信号,则继续判断,直至gps或北斗信号接收正常;
17.步骤3)判断是否处于工作时间,未处于工作时间,则继续判断并保持静默状态,直至判断处于工作时间,进入下一步骤;
18.步骤4)判断采集装置的朝向是否位于太阳位置的设定锥角范围内;
19.未在设定锥角范围内时,根据gps或北斗信号控制太阳跟踪装置对采集装置的朝向进行调节一次,并跳转至步骤3);
20.在设定锥角范围内时,进入下一步骤:
21.步骤5)判断每个镜筒是否均达到了四象限工作阈值;
22.当镜筒未达到四象限工作阈值,则根据镜筒姿态数据和实际太阳位置的偏差方向输出调节指令,对镜筒进行一次粗调,使得镜筒达到四象限工作阈值;
23.当镜筒达到了四象限工作阈值,则根据四象限工作阈值进行一次位置微调;
24.调节结束后跳转至步骤3)。
25.本发明的有益效果:
26.1、通过电动云台的配合,使得单个镜筒能够独立调节,每个镜筒都能够自我完成与太阳光的对焦,解决了光学积累误差导致的聚焦问题,保证每个镜片的汇聚光斑均能耦合进入每一根光纤。
27.2、单个镜筒能够独立调节后,可以最大程度分担整体运行的动作,可以在不大浮动摆动跟踪的情况下,就能更好的采集太阳光。
附图说明
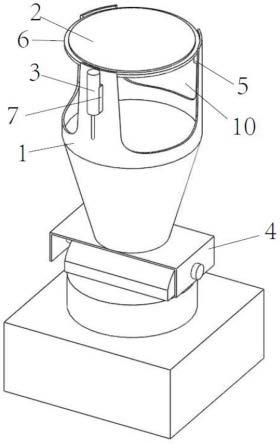
28.图1是本发明的照明模块结构示意图;
29.图2是本发明的传感器组装配合结构示意图;
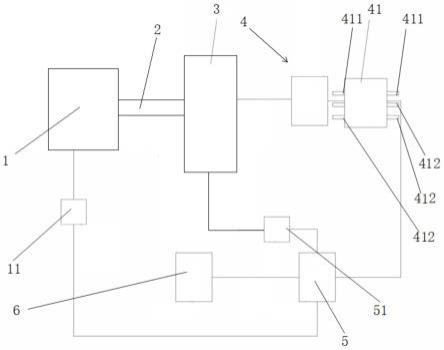
30.图3是本发明的照明系统结构示意图;
31.图4是图3中部分结构放大示意图;
32.图5是本发明的轨迹方法流程图。
具体实施方式
33.下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
34.参照图1所示,本发明的独立可调的光纤太阳光照明模块的一实施例,包括镜筒1,镜筒底部设置有光纤,镜筒顶部设置有透镜2,镜筒外周上设置有太阳追踪传感器3,镜筒固定在电动云台4上。透镜将太阳光聚焦至光纤端部并能耦合进入光纤内,太阳追踪传感器检测太阳位置,并通过电动云台控制镜筒的姿态,使得透镜聚焦位置始终保持良好的聚焦耦合效果。
35.镜筒内壁上设置有凸台5,凸台与镜筒内壁配合形成支撑安装平台,透镜周边搭设并固定在支撑安装平台上,固定采用自攻螺钉直接锁固,自攻螺丝穿过透镜与支撑安装平台螺纹连接,安装便捷。并且在透镜外周上设置有安装凸部6,安装凸部搭设并固定在支撑安装平台上,通过安装凸部的设计,在锁固时不损坏透镜聚光部分。镜筒上开设有减重孔
10,降低镜筒重量,减小电动云台的荷载,运行更为稳定。
36.参照图1和图2所示,为了保证透镜聚焦与太阳追踪传感器检测的相对位置,将太阳追踪传感器固定在安装架7上,安装架表面设置有球形凸部8,球形凸部对应的镜筒表面设置有球形凹部9,球形凸部与球形凹部配合定位并通过焊接固定,球形凸部的半径小于球形凹部的半径,在安装时,先通过固定装置将镜筒固定,然后将太阳光模拟装置打开,调节固定装置,使得透镜将光纤聚焦至光纤端部,随后通过机械手将固定有太阳追踪传感器的安装架贴合在镜筒表面,具体的,球形凸部与球形凹部抵接在一起,根据太阳追踪传感器采集的信号,调节安装架的位置,此处调节为360度转动可调,双球面抵靠,调节更为顺畅,使得模拟太阳光束斑位于四象限中心,此时采用焊接的方式将安装架和镜筒固定。
37.参照图4和图5所示,本发明还公开一种照明系统,包括太阳跟踪装置11 以及设置在太阳跟踪装置上的采集装置12,采集装置内设置有多个上述的照明模块15,由于每个照明模块均设置有独立的电动云台,因此每个照明模块均能够独立调节,且调节具有一定的范围角度,因此可以最大程度分担整体运行的动作,可以在不大浮动摆动跟踪的情况下,就能更好的采集太阳光,因此能够适用在转动受限的场合适用。
38.为了满足独立调节的需要,还设计有安装底板13,安装底板上设置有调节避让过孔14,照明模块的电动云台与安装底板背面固定,照明模块的镜筒穿过调节避让过孔至安装底板表面一侧,组装时,照明模块的电动云台从安装底板正面穿过调节避让过孔至背面,然后进行固定,组装便捷。
39.基于上述的照明系统,本发明还公开了一种轨迹方法,具体的太阳光跟踪的工作流程如图5所示,该算法为一闭环控制结构,首先控制系统经过初始化自检过程,然后判断当下环境是白天还是夜晚。如果处于夜晚,则进入静默状态,如果是白天则进入跟踪流程。另外,系统初始化还要完成系统的资源配置和机械结构基准位置的搜索,确定机械机构的基准位置是十分必要的,在系统运行过程中,偶尔的掉电是可能的,要防止系统再加电时会因无法确定当前的机械位置而产生严重错误;另外,日落后系统需要按原路线返回至基准位置,以避免光纤、电缆的缠绕,这也要求系统须有一个可以确定的基准位置,这一过程通过角度传感器来实现。
40.具体的轨迹方法如下:
41.先初始化系统;判断gps或北斗信号是否接收正常,未接收到gps或北斗信号,则继续判断,直至gps或北斗信号接收正常;
42.随后判断是否处于工作时间,未处于工作时间,为晚上,则继续判断并保持静默状态,直至判断处于工作时间,为白天,则接着判断采集装置的朝向是否位于太阳位置的设定锥角范围内;
43.判断过程中具有两个逻辑,一是当采集装置的朝向不在设定锥角范围内时,根据gps或北斗信号控制太阳跟踪装置对采集装置的朝向进行调节一次,使得采集装置的朝向更加对准太阳,且在设定锥角范围内,随后需要再次判断工作时间,根据判断的工作时间重复判断采集装置的朝向;二是当采集装置的朝向位于设定锥角范围内时,则继续判断每个镜筒是否均达到了四象限工作阈值;
44.判断是否达到四象限工作阈值时也具有两个逻辑,一是当镜筒未达到四象限工作阈值,则根据镜筒姿态数据和实际太阳位置的偏差方向输出调节指令,对镜筒进行一次粗
调,使得镜筒达到四象限工作阈值;二是当镜筒达到了四象限工作阈值,则根据四象限工作阈值进行一次位置微调,使得对准精度进一步提高,且无论是在镜筒直接判断达到或者粗调后达到四象限工作阈值,均需要进行一次微调,以保证对准精度;调节结束后继续从判断工作时间的步骤重新判断,以此重复循环判断,达到闭环效果。
45.上述在判断采集装置的朝向是否位于太阳位置的设定锥角范围内时,当采集装置的朝向不在设定锥角范围内,且太阳跟踪装置受限无法再移动时,界定此种情况为位于太阳位置的设定锥角范围内,直接调节单个筒镜的位置,从而继续且有效的采集太阳光。
46.当阴天时,太阳辐照度较弱,散射光相对较强,四象限探测器很难响应光线的变化,镜筒复位后不做任何动作,系统切换到基于gps或北斗的太阳轨迹跟踪方式进行采集。具体的,判断当下环境光是否达到高精度太阳对准系统(四象限探测器)的工作阈值,如低于阈值,则判定此时处于阴雨或多云天气,系统马上进入基于gps或北斗的跟踪模式,反之,则进入光电、gps或北斗双探测跟踪方式。
47.其中,镜筒复位时,设置有预设角度,此角度主要以安装底板为基准进行设定,且可以根据gps或北斗跟踪过程中采集装置朝向太阳,且每个镜筒也处于移动校准后的位置,记录此时位置的调整参数,在基于gps或北斗的跟踪模式时,此调整参数为复位参数。
48.以上实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。