1.本发明涉及铆接领域,具体涉及一种铆接机自动化铆接装置。
背景技术:
2.液压铆接机广泛应用于轻卡、中卡和重卡车架及大型客车与矿车车架的铆钉铆接,国内现有的铆接机均采用人工铆接,铆接效率低、铆接质量差,工人劳动强度大,更没有安全性,极容易造成人身伤害。更不能满足现在汽车行业各类车架的快速铆接要求,迫切需要开发能依靠机械手自动铆接的高效液压铆接机。
技术实现要素:
3.本发明的目的是提供一种铆接机自动化铆接装置,以解决不能自动铆接的问题。
4.为实现上述目的,本发明采用如下技术方案:
5.一种铆接机自动化铆接装置,包括铆钳、随动机构和位置精度控制传感器;所述铆钳包括两个平行梁和一个连接梁,所述连接梁上固定连接有随动机构,所述铆钳的两端分别固定连接有朝向相对方向的上铆模和下铆模,所述平行梁上固定连接有油缸;
6.所述随动机构凸出所述连接梁的一端固定连接有机械手;所述随动装置能够伸缩;所述位置精度控制传感器能够监测所述铆钳相对于所述机械手的位置。
7.进一步地,所述随动机构包括固定杆和滑动杆,所述固定杆为空心筒,所述固定杆与所述连接梁固定连接,所述滑动杆一端固定连接有端盖,所述端盖用于连接所述机械手,所述滑动杆另一端螺纹连接有卡接头,所述滑动杆与所述固定杆连接。
8.进一步地,所述连接梁长度方向上开设有柱形孔,所述柱形孔的长度大于所述固定杆的长度,所述固定杆外壁与所述柱形孔侧壁固定连接,所述固定杆一端与所述柱形孔开口平齐,所述卡接头外侧与所述柱形孔接触。
9.进一步地,所述固定杆与所述柱形孔开口平齐的一端固定连接有连接盘,所述连接盘与所述连接梁螺栓连接。
10.进一步地,所述连接梁一端固定连接有导向杆,所述导向杆与所述连接盘滑动连接。
11.进一步地,所述端盖边缘连接有带有导向孔的凸起,所述导向孔与所述导向杆连接,所述导向杆用于防止所述滑动杆转动。
12.进一步地,靠近所述导向杆的所述平行梁上固定连接有传感器支架,所述传感器支架垂直于所述平行梁。
13.进一步地,所述传感器支架上开设有条形孔,所述条形孔内固定连接有位置精度控制传感器。
14.进一步地,所述油缸在进油口处固定连接有压力传感器。
15.本发明的有益效果:
16.通过随动装置的伸缩功能,能够实现铆钳和机械手之间距离的移动,在工作过程
中,通过机械手将上铆模和下铆模放置在铆钉安装位置的两侧,不需要下铆模对铆钉下端的顶紧,只要通过铆钳上的油缸就能实现对指定位置的铆接,随动装置能够平行铆接时的合力,减小铆接对机械手的把持力,提高整体的铆接性能。通过位置精度控制传感器判断铆钳相对于机械手的位置,判断是否铆接完成,再通过机械手控制铆钳对其他部分进行铆接,实现了自动化。
附图说明
17.图1是一种铆接机自动化铆接装置整体连接结构示意图;
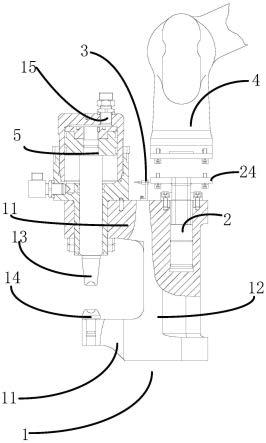
18.图2是一种铆接机自动化铆接装置实施例1剖面图;
19.图3是一种铆接机自动化铆接装置实施例2立体图;
20.图4是一种铆接机自动化铆接装置实施例3剖面图
21.图中各标记对应的名称:
22.1-铆钳;11-平行梁;12-连接梁;13-上铆模;14-下铆模;15-压力传感器;16-导向杆;2-随动装置;21-固定杆;22-滑动杆;23-连接盘;24-端盖;25-卡接头;3-位置精度控制传感器;31-传感器支架;32-条形孔;4-机械手;5-油缸。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
24.本发明的实施例1:
25.参见附图1,一种铆接机自动化铆接装置,包括铆钳1、随动机构2、位置精度控制传感器3和机械手4;
26.铆钳1包括两个平行梁11和一个连接梁12,连接梁12长度方向上开设有柱形孔,两个平行梁11的右端均与连接梁12连接,两个平行梁11的左端分别固定连接有朝向相对方向的上铆模13和下铆模14;靠上的平行梁11上固定连接有油缸5,油缸5在进油口处固定连接有压力传感器15,压力传感器15用于检测油缸5无杆腔的压力。
27.参见附图2,随动机构2包括固定杆21和滑动杆22,固定杆21为空心筒,固定杆21上端固定连接有连接盘23,连接盘23通过螺栓与连接梁可拆卸连接。滑动杆22上端固定连接有端盖24,端盖24与机械手4通过螺栓连接,滑动杆22下端螺纹连接有卡接头25。卡接头25为变径结构,与滑动杆22连接部分的直径较小,下端直径较大。柱形孔的长度大于固定杆21的长度,固定杆21上端与柱形孔开口平齐,卡接头下端位于固定杆21下端到柱形孔下端之间,并且卡接头25下端侧面与柱形孔接触。通过卡接头25和端盖24的设置,使得固定杆21只能在滑动杆22上滑动,固定杆21与铆钳1固定,滑动杆22与机械手4固定,相当于铆钳1相对于机械手4能够上下滑动。
28.参见附图2,连接梁12上端固定连接有导向杆16,端盖24边缘固定连接有带有导向孔的凸起,导向孔与导向杆16滑动连接。导向杆16用于防止在工作过程中滑动杆22和固定杆21相互转动。
29.参见附图1和2,连接有导向杆16的平行梁11上固定连接有传感器支架,传感器支架垂直于平行梁11。传感器支架上开设有条形孔,条形孔内固定连接有位置精度控制传感
器3。位置精度控制传感器3朝向滑动杆22的方向,机械手4上还设置有相对方向的信号发射器,当滑动杆22相对于固定杆向下运动到一定距离,完成铆钉的铆接工作后,信号发射器发射的信号被位置精度控制传感器3捕捉,从而使滑动杆22向上移动,进行下一个位置的铆接。
30.本实施例的使用方法:
31.机械手4将铆钳1移动到安装铆钉位置,将上铆模13调整到安装铆钉位置正上侧,将下铆模14调整到安装铆钉位置正下侧,油缸5伸长使得上铆模13向下运动,当上铆模13的下端顶紧铆钉安装面时,油缸5继续伸长,上铆模13不再运动,下铆模14向上运动,平行梁11向上运动,当压力传感器5检测的压力达到预定压力时,油缸5开始缩短,当触到位置精度控制传感器3时,给机械人发指令移动铆钳进行下一铆钉的铆接,直到运行完整个程序,工作结束。
32.本发明的实施例2:
33.参见附图3,平行梁11在连接导向杆16的位置开设有第二柱形孔,导向杆16与第二柱形孔滑动连接,导向杆16上端与端盖24固定连接。通过上述导向杆16的方式实现防止滑动杆22相对于固定杆转动,其它结构与实施例1相同,使用方法与实施例1相同。
34.本发明的实施例3:
35.参见附图4,柱形孔的贯穿连接梁12,连接梁12的上下两端均连接有固定杆21,滑动杆22穿过连接梁12,下端连接有卡接头25,用于防止滑动杆22与连接梁12脱离。整个滑动杆22穿过连接梁12,其它结构与实施例2相同,使用方法与实施例2相同。
36.本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本技术相同或相近似的技术方案,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
