1.本发明涉及一种机器人,具体是一种消毒机器人。
背景技术:
2.消毒灭菌是医疗机构或公共消费场所(如酒店、餐厅等)预防与控制人员发生病毒交叉感染的主要手段,是医疗机构或消费场所提高服务质量和保障人员安全的基础性工作。
3.传统消毒方式主要通过人工喷洒消毒液来进行消毒灭菌,需要耗费大量的人力和时间,工作效率低,且很容易因人为因素造成消毒的盲区及死角,影响消毒效果。为解决人工喷洒消毒液存在的上述问题,近年来,人们开发设计了消毒机器人以提高消毒效率和消毒效果。并且,为了适应不同场景的消毒需求,现有消毒机器人包括机器人本体、紫外灯柱和喷头组件,紫外灯柱与机器人本体连接,喷头组件设置在紫外灯柱上。然而,该消毒机器人的喷头组件设置在紫外灯柱顶部,消毒液通过喷头组件沿竖直方向向上喷洒,雾化消毒液在向上喷洒的同时,会向下扩散,而在向下扩散过程中,会凝聚形成消毒液滴,从而影响雾化消毒液的扩散均匀性,此外,现有的消毒机器人大部分仅配备固定式喷头组件,喷头组件的喷洒高度、角度及其形成的喷洒范围受到机器人本身的高度或尺寸限制,因此,在喷洒消毒液的过程中依然难以避免出现消毒死角的情况,影响消毒效果。
技术实现要素:
4.本发明的目的在于提供一种消毒机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:
6.一种消毒机器人,包括机器人本体、喷雾消杀组件和光照消杀组件;所述机器人本体内部具有中腔;所述光照消杀组件设置于所述中腔内且高度可调,用于对周围环境进行光照消杀,所述光照消杀组件的顶部具有高于所述中腔的超出部分;所述喷雾消杀组件设置于所述超出部分上,用于对周围环境进行喷雾消杀。
7.作为本发明的进一步改进:所述光照消杀组件包括灯柱和紫外灯组件,所述灯柱设置于所述中腔内且高度可调,所述灯柱的顶部高于所述中腔并形成所述超出部分,所述紫外灯组件固定安装在所述灯柱上。
8.作为本发明的进一步改进:所述喷雾消杀组件包括多个雾化喷头和圆盘喷头,多个所述喷头等间距环绕设置在所述灯柱的顶部超出部分上,所述雾化喷头的喷洒方向倾斜向上,所述圆盘喷头设置于所述灯柱的顶部,并相对于灯柱顶部高度可调转动角度可调,俯仰角度可调。
9.作为本发明的进一步改进:所述灯柱包括柱体部和圆台部,所述圆台部设置于所述柱体部上,所述柱体部纵向滑动设置于所述中腔内,所述圆台部位于所述中腔之外并形成所述灯柱的超出部分,所述圆台部的顶部周侧具有倾斜环面,多个所述雾化喷头环绕固定连接在所述倾斜环面上,以实现雾化喷头的喷洒方向倾斜向上设置。
10.作为本发明的进一步改进:所述圆台部内开设有收缩腔,所述圆盘喷头能够延伸或收缩至所述收缩腔内。
11.作为本发明的进一步改进:所述收缩腔的底部沿竖直轴向转动安装有转动台,所述转动台的上方设置有升降板,所述转动台与所述升降板之间设置有用于调节升降板高度的升降组件,所述圆盘喷头沿水平轴向转动安装在所述升降台上。
12.作为本发明的进一步改进:还包括水泵和消毒瓶,消毒瓶用于盛装消毒液,所述消毒瓶通过水泵分别与所述雾化喷头、圆盘喷头连接。
13.作为本发明的进一步改进:所述机器人本体上开设有瓶腔,瓶腔内设置有用于对消毒瓶进行固定的夹座,所述机器人本体上设置有用于打开或关闭所述瓶腔的门板。
14.作为本发明的进一步改进:所述夹座内设置有座腔和侧槽,所述侧槽有多个并环绕设置在座腔的周侧,并与所述座腔相连通,所述侧槽内设置有拐臂,所述拐臂的中部通过转轴与所述侧槽的槽壁铰接以形成杠杆结构,所述拐臂与所述夹座之间设置有用于使拐臂底端向内挤压的复位弹簧;自然状态下,拐臂的底端在复位弹簧的作用下延伸至所述座腔内,拐臂的顶端位于所述座腔所在延伸面的外侧;反之,在杠杆作用下,拐臂的底端回缩至侧槽中,拐臂的顶端向内转动并延伸至座腔延伸面。
15.作为本发明的进一步改进:所述紫外灯组件包括多根紫外灯条和环形紫外灯,多根紫外灯条固定安装在所述柱体部的外周,所述环形紫外灯固定安装在所述圆台部的顶端。
16.与现有技术相比,本发明的有益效果是:
17.本发明公开的消毒机器人,通过在机器人本体内部的中腔中设置有光照消杀组件,该光照消杀组件高度可调,喷雾消杀组件设置在光照消杀组件顶部高出中腔的超出部分上,进而使该消毒机器人能够随时进行喷雾消毒,且喷雾消杀组件能够随着光照消杀组件的升降而升降,当喷雾消杀组件喷出的消毒液水雾沉降过程中,能够与光照消杀组件产生的光照范围相复合,以使喷雾消杀范围与光照消杀范围的重叠部分始终保持合理范围,进而提高复合消杀效果。
附图说明
18.图1为消毒机器人的结构示意图;
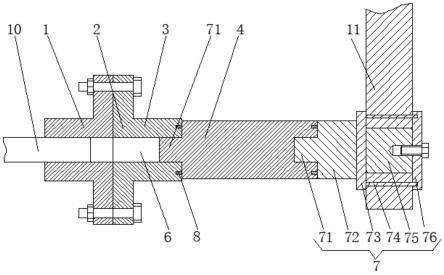
19.图2为消毒机器人的剖视图;
20.图3为消毒机器人中灯柱的抬升状态示意图;
21.图4为消毒机器人中圆盘喷头的伸出状态示意图;
22.图5为剪叉架的结构示意图;
23.图6为消毒机器人中夹座的结构示意图;
24.图中:机器人本体1、行走机构11、中腔12、瓶腔13、门板13a;雾化喷头2、伸缩软管2a、水泵21、消毒瓶22、夹座23、座腔231、侧槽232、拐臂233、复位弹簧234、滚轮235、夹头236、转轴237、灯柱3、柱体部31、圆台部32、环槽32a、收缩腔32b、紫外灯条4、圆盘喷头5、升降板51、剪叉架52、剪叉杆组件521、第一杆件521a、第二杆件521b、横梁杆521c、液压缸522、转动台53、环形紫外灯6。
具体实施方式
25.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
26.请参阅图1-2,本实施例,一种消毒机器人,包括机器人本体、喷雾消杀组件和光照消杀组件;所述机器人本体内部具有中腔;所述光照消杀组件设置于所述中腔内且高度可调,用于对周围环境进行光照消杀,所述光照消杀组件的顶部具有高于所述中腔的超出部分;所述喷雾消杀组件设置于所述超出部分上,用于对周围环境进行喷雾消杀。
27.本实施例中,包括机器人本体、喷雾消杀组件和光照消杀组件,光照消杀组件设置于所述机器人本体的中腔内且高度可调,换言之,光照消杀组件上下滑动设置在所述中腔内,当光照消杀组件移动至最低位置时,光照消杀组件的大部分均容置在中腔内,进而通过光照消杀组件高度调节以及伸出至中腔外部分的高度,以调节其光照消杀的范围,同时便于消毒机器人整体体积的缩小,减少空间的占用。喷雾消杀组件设置在光照消杀组件顶部高出中腔的超出部分上,可以理解的是,所述超出部分,是指当光照消杀组件降低至中腔最低部位置时,其顶部暴露在中腔之外的部分,且喷雾消杀组件设置在所述超出部分上,进而使该消毒机器人能够随时进行喷雾消毒,且喷雾消杀组件能够随着光照消杀组件的升降而升降,当喷雾消杀组件喷出的消毒液水雾沉降过程中,能够与光照消杀组件产生的光照范围相复合,以使喷雾消杀范围与光照消杀范围的重叠部分始终保持合理范围,以提高复合消杀效果。
28.本实施例中,可选的,所述光照消杀组件包括灯柱3和紫外灯组件,所述灯柱设置于所述中腔内且高度可调,所述灯柱的顶部高于所述中腔并形成所述超出部分,所述紫外灯组件固定安装在所述灯柱上。
29.灯柱3作为紫外灯组件的安装载体以及升降部件设置在中腔内,紫外灯组件安装在灯柱3上,紫外灯组件与灯柱3同步移动,紫外灯组件向外发出紫外光以实现光照消毒,且其光照消毒范围随着此紫外灯组件的升降而产生变化,进而调节光照消毒范围,在不使用紫外灯组件时,紫外灯组件与灯柱3的大部分实体能够容纳在中腔内,进而降低占地空间,缩小消毒机器人体积。
30.本实施例中,可选的,所述喷雾消杀组件包括多个雾化喷头2和圆盘喷头5,多个所述雾化喷头2等间距环绕设置在所述灯柱3的顶部超出部分上,所述雾化喷头2的喷洒方向倾斜向上,所述圆盘喷头5设置于所述灯柱3的顶部,并相对于灯柱3顶部高度可调转动角度可调,俯仰角度可调。
31.其中,多个所述雾化喷头2等间距环绕设置在所述灯柱3的顶部超出部分上,所述雾化喷头2的喷洒方向倾斜向上,所述圆盘喷头5设置于所述灯柱3的顶部,并相对于灯柱3顶部高度可调转动角度可调,俯仰角度可调。环绕设置在灯柱3上的多个雾化喷头2,雾化喷头2用于将消毒液进行雾化后扩散喷出,雾化喷头2随灯柱3的高度调节以实现周向喷洒,以扩大喷洒范围,同时,雾化喷头2的喷出方向朝向上方倾斜,以使得喷出的消毒液水雾朝上并向外扩散,进一步提高喷洒范围,以适应不同的使用场景。所述圆盘喷头5设置于所述灯柱3的顶部,并相对于灯柱3顶部高度可调转动角度可调,俯仰角度可调。圆盘喷头5为可灵活移动的喷洒设备,用于对局部的建筑死角进行针对性喷洒消毒,以达到针对性消除死角,达到建筑空间全面消杀的目的。
32.参阅图3,本实施例中,具体的,所述灯柱3包括柱体部31和圆台部32,所述圆台部32设置于所述柱体部31上,所述柱体部31纵向滑动设置于所述中腔12内,所述圆台部32位于所述中腔12之外并形成所述灯柱3的超出部分,所述圆台部32大致呈倒圆台状,所述圆台部32的顶部周侧具有倾斜环面,多个所述雾化喷头2环绕固定连接在所述倾斜环面上,以实现雾化喷头2的喷洒方向倾斜向上设置。
33.本实施例中,可选的,所述紫外灯组件包括多根紫外灯条4和环形紫外灯6,多根紫外灯条4固定安装在所述柱体部31的外周,所述环形紫外灯6固定安装在所述圆台部32的顶端。
34.其中,所述柱体部31的外周侧固定安装有多根紫外灯条4,多根所述紫外灯条4环向等间距设置于所述柱体部31上,紫外灯条4随柱体部31的上下滑动而延伸至中腔12外或回缩至中腔12内,其向外照射产生的紫外光对周围环境进行进一步消杀,同时,紫外灯条4的照射范围与雾化喷出的消毒水雾重合,从而达到增强消杀能力的作用。所述圆台部32的顶部端面处固定安装有环形紫外灯6,环形紫外灯6针对机器人本体1移动的上方空间进行照射杀菌,进一步优化消杀范围。
35.参阅图4,本实施例中,所述圆盘喷头5设置于所述灯柱3的顶部,并相对于灯柱3顶部高度可调转动角度可调,俯仰角度可调。具体的,所述圆台部32内开设有收缩腔32b,所述灯柱3能够延伸或收缩至所述收缩腔32b内,以达到节约空间的效果,便于圆盘喷头5的收纳,防止圆盘喷头5在非工作状态下裸露在外而造成损坏。可选的,所述收缩腔32b的底部沿竖直轴向转动安装有转动台53以实现转动台53的周向角度调节,所述转动台53的上方设置有升降板51,所述转动台53与所述升降板51之间设置有用于调节升降板51高度的升降组件,升降组件实现升降板51的高度调节,所述圆盘喷头5沿水平轴向转动安装在所述升降台上以实现圆盘喷头5的俯仰角度调节。进而实现圆盘喷头5的灵活运转,保证建筑死角的全面消杀。
36.可选的,所述升降组件包括但不仅限于剪叉架52,剪叉架52的一端设置于升降板51上,剪叉架52的另一端设置于转动台53上,剪叉架52能够保证升降板51的稳定升降,同时配合收缩腔32b的使用,能够完全收容于所述收缩腔32b内,以达到节约空间的作用。
37.参阅图5,具体的,所述剪叉架52包括多组剪叉杆组件521,其中,所述剪叉杆组件521包括横梁杆521c和两对杆件,两对所述杆件位于横梁杆521c的两侧,所述杆件与所述横梁杆521c转动连接,所述杆件与横梁杆521c的转动连接位置位于杆件的中央,以使位于同侧的第一杆件521a和第二杆件521b形成剪叉结构。相邻的两个所述剪叉杆组件521中,其中一个剪叉杆组件521中的第一杆件521a与另一个剪叉杆组件521中同侧的第二杆件521b端部铰接,进而形成所述剪叉架52。
38.其中,所述剪叉架52采用小型直推式气缸或者直推式液压缸522驱动,以直推式液压缸522为例,该直推式液压缸522的一端转动安装在所述转动台53上,另一端转动安装在任意一组所述剪叉杆组件521的横梁杆521c上。当液压缸522伸长时,推动该横梁杆521c向上抬升,进而推动剪叉架52整体交叉抬升,并使得升降板51向上顶起;当液压缸522缩短时,拉动该横梁杆521c向下回收,进而拉动剪叉架52整体交叉折叠,并使得升降板51下降,通过上述方式使圆盘喷头5连同升降板51同步升降,此外,使用剪叉架52能够在其折叠收缩时减小占用空间,进而便于圆盘喷头5以及升降组件的整体收纳。同样的,剪叉架52采用直推式
气缸进行驱动升降时,直推式气缸的安装方式以及驱动过程与前述的液压缸522的安装方式以及驱动过程完全相同,为避免重复,此处不作进一步说明。
39.本实施例中,还包括水泵21和消毒瓶22,消毒瓶22用于盛装消毒液,所述消毒瓶22通过水泵21分别与所述雾化喷头2、圆盘喷头5连接。通过水泵21将消毒瓶22内的消毒液泵入雾化喷头2以及圆盘喷头5内并进行喷出,从而达到消毒目的。
40.可选的,所述水泵21和消毒瓶22均设置于所述机器人本体1内,所述圆台部32内开设有环槽32a,所述环槽32a上具有进液口和多个出液口,所述环槽32a的进液口通过伸缩软管2a与所述水泵21连接,所述环槽32a的出液口通过但不仅限于塑料管与多个所述雾化喷头2连接,所述环槽32a的其中一个出液口还通过伸缩软管2a与所述圆盘喷头5连接,机器人本体1内设置有供与所述水泵21对应连接的所述伸缩软管2a穿过的通槽,所述圆台部32内开设有供与所述圆盘喷头5对应连接的所述伸缩软管2a穿过的通槽。伸缩软管2a具有良好的伸缩性,能够适应雾化喷头2相对于机器人本体1的高度调节以及圆盘喷头5相对于灯柱3的高度调节。
41.为了便于消毒瓶22的放置,所述机器人本体1上开设有瓶腔13,瓶腔13内固定设置有用于对消毒瓶22进行固定的夹座23,当消毒瓶22放置在夹座23上时能够被固定限位,避免消毒瓶22发生倾倒或晃动,所述机器人本体1上设置有用于打开或关闭所述瓶腔13的门板13a。以便于对消毒瓶22进行取出更换。
42.参阅图6,本实施例中,所述夹座23内设置有座腔231和侧槽232,所述座腔231用于放置所述消毒瓶22,所述侧槽232有多个并环绕设置在座腔231的周侧,并与所述座腔231相连通,所述侧槽232内设置有拐臂233,所述拐臂233的中部通过转轴237与所述侧槽232的槽壁铰接,所述拐臂233的底端倾斜朝向所述座腔231方向延伸,所述拐臂233的顶端朝向所述座腔231方向延伸。所述拐臂233与所述夹座23之间设置有用于使拐臂233底端向内挤压的复位弹簧234。自然状态下,拐臂233的底端在复位弹簧234的作用下延伸至所述座腔231内,拐臂233的顶端位于所述座腔231所在延伸面的外侧;当消毒瓶22放置于座腔231内时,消毒瓶22对拐臂233的底端下压并使其向外回缩至侧槽232中,复位弹簧234处于压缩状态,拐臂233的顶端在杠杆作用下向内转动并对消毒瓶22进行夹持,从而达到消毒瓶22稳定的作用。
43.本实施例中,可选的,所述拐臂233的顶端铰接有夹头236,夹头236作用于消毒瓶22以增加摩擦力。所述拐臂233的底部转动设置有用于与消毒瓶22滚动接触的滚轮235。
44.本实施例中,优选的,所述机器人本体1的底部设置有行走机构11,所述行走机构11上设置有障碍探测装置、定位装置和供电装置。具体地,行走机构11为全向轮行走机构11,行走机构11包括:圆形底板,圆形顶板、驱动电机和三个全向轮,三个全向轮分别通过安装座安装在圆形底板上作为驱动轮,再将驱动电机与三个全向轮连接,通过驱动电机分别驱动三个全向轮运动,实现消毒机器人全向移动,从而可以实现全向移动消毒,消毒机器人能够在较小的空间里平移或旋转,可以有效避免出现消毒的盲区及死角。进一步地,行走机构11下方的侧面设有多种障碍物探测装置,障碍物探测装置包括深度信息摄像头、激光雷达、多个红外传感器和超声波传感器,多个红外传感器和超声波传感器沿行走机构11的侧壁周向布置,行走机构11上靠近本体主体的一侧开设有凹槽,深度信息摄像头安装在该凹槽的底部。障碍物探测装置和定位装置均与控制系统通信连接,定位装置用于定位数字x射线摄影设备的位置信息并发送至控制系统,障碍物探测装置用于探测周围的障碍物反馈至
控制系统,由控制器计算规划移动及避障路径,控制行走机构11移动,实现自主移动,自主定点,自主巡航消毒。供电装置分别为电机、障碍探测装置和定位装置供电。
45.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
或“包含
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的要素。此外,在本文中,“大于”、“小于”、“超过”等理解为不包括本数;“以上”、“以下”、“以内”等理解为包括本数。
46.尽管已经对上述各实施例进行了描述,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改,所以以上所述仅为本发明的实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。