技术特征:
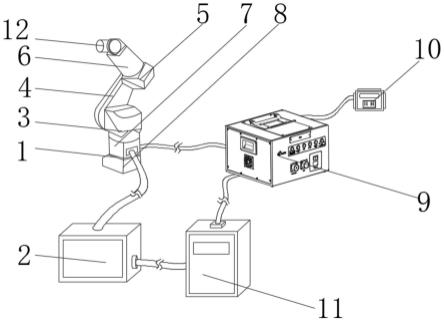
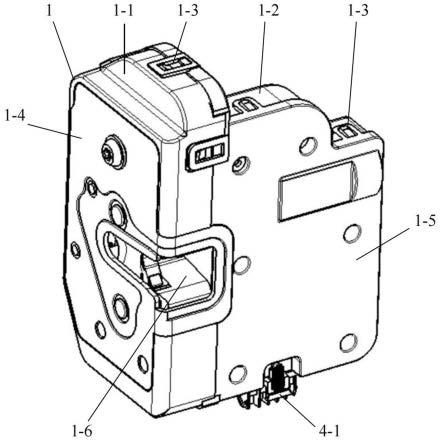
1.一种防爆协作机器人,包括:固定框(1),其特征在于:所述固定框(1)上方连接有接线箱(7),所述接线箱(7)上方连接有第一关节结构(3),所述第一关节结构(3)一侧连接有第一转动臂(4),所述第一转动臂(4)一侧与第二关节结构(5)连接,所述第二关节结构(5)一侧与第二转动臂(6)连接,所述接线箱(7)一侧通过导管连接有增压箱(2),所述固定框(1)下方连接有缓冲底座(8),所述增压箱(2)还包括:箱体(201),内部通过导管与所述接线箱(7)连接;气泵(202),固定在所述箱体(201)内部,并且通过导管与所述接线箱(7)连接;干燥器(203),一端与所述气泵(202)连接,另一端与箱体(201)外侧进气口连接。2.根据权利要求1所述的一种防爆协作机器人,其特征在于:所述第一关节结构(3)位于接线箱(7)上方,所述第一关节结构(3)还包括:第一壳体(31),下方与所述接线箱(7)连接;第一关节主体(32),设置在所述第一壳体(31)内部;第一流动腔(33),位于在第一壳体(31)与第一关节主体(32)之间。3.根据权利要求1所述的一种防爆协作机器人,其特征在于:所述第一转动臂(4)位于第一关节结构(3)一侧,所述第一转动臂(4)还包括:第一外壳(41),一侧与所述第一壳体(31)连接;第一转动臂主体(42),设置在所述第一外壳(41)内部;第二流动腔(43),位于在第一外壳(41)与第一转动臂主体(42)之间。4.根据权利要求1所述的一种防爆协作机器人,其特征在于:所述第二关节结构(5)位于第一转动臂(4)一侧,所述第二关节结构(5)还包括:第二壳体(51),一侧与所述第一外壳(41)连接;第二关节主体(52),设置在所述第二壳体(51)内部;第三流动腔(53),位于在第二壳体(51)与第二关节主体(52)之间。5.根据权利要求1所述的一种防爆协作机器人,其特征在于:所述第二转动臂(6)位于第二关节结构(5)一侧,所述第二转动臂(6)还包括:第二外壳(61),一侧与所述第二壳体(51)连接;第二转动臂主体(62),设置在所述第二外壳(61)内部;第四流动腔(63),位于在第二外壳(61)与第二转动臂主体(62)之间。6.根据权利要求1所述的一种油烟清洗装置,其特征在于:所述缓冲底座(8)位于固定框(1)下方,所述缓冲底座(8)还包括:外框(81),内部与所述固定框(1)连接;缓冲弹簧(82),设置在所述外框(81)内壁,且连接在外框(81)与固定框(1)之间;减震弹簧(83),设置在所述外框(81)底部,且连接在外框(81)与固定框(1)之间。7.根据权利要求2所述的一种防爆协作机器人,其特征在于:所述第一壳体(31)、第一外壳(41)、第二壳体(51)和第二外壳(61)结构相同。8.根据权利要求2所述的一种防爆协作机器人,其特征在于:所述第一壳体(31)还包括外壳主体(34)、保护涂层(35)、防水层(36)和干燥填充层(37),所述外壳主体(34)表面设置有保护涂层(35),所述外壳主体(34)内部设置有防水层(36)和干燥填充层(37)。9.根据权利要求1所述的一种防爆协作机器人,其特征在于:所述接线箱(7)一侧通过
导线连接有防爆控制柜(9),所述防爆控制柜(9)一侧连接有示教器(10),所述防爆控制柜(9)和增压箱(2)均通过导线与电箱(11)连接,所述第二转动臂(6)一端连接有末端法兰(12)。10.根据权利要求1所述的一种防爆协作机器人,其特征在于:所述第一转动臂(4)一侧设置有压力计(13)和调压阀(14)。
技术总结
本发明公开了一种防爆协作机器人,包括:固定框,固定框上方连接有接线箱,接线箱上方连接有第一关节结构,第一关节结构一侧连接有第一转动臂,第一转动臂一侧与第二关节结构连接,第二关节结构一侧与第二转动臂连接,接线箱一侧通过导管连接有增压箱,固定框下方连接有缓冲底座。该机器人通过控制气泵将惰性气体的通入到接线箱中,通过惰性气体进入到接线箱中后,会充满第一流动腔、第二流动腔、第三流动腔和第四流动腔,使得保持手臂内部的气压比外界大气压高,从而阻止粉尘和液体进入手臂内,通过压力计观察内部压强较低时,打开气泵进行的通气,确保手臂内部稳定,达到良好的防爆。达到良好的防爆。达到良好的防爆。
技术研发人员:张伟 王代华 武爽
受保护的技术使用者:苏州华旭自动化设备有限公司
技术研发日:2022.07.06
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。