1.本发明涉及水下机器人领域,特别涉及一种用于水下探测的球形机器人及控制方法。
背景技术:
2.水下探测机器人通常用于引水隧洞检测、大型管道内部检测、海底沉船调查等狭小、复杂空间的探测场景下。
3.现有技术中的水下探测机器人如公开号为cn104029805a的中国专利公开的一种浅水探测水下球形机器人,包括一个抗压的密封球壳结构、四个辅助螺旋桨推进器、一个主螺旋桨推进器、一个内部控制装置、一个锥形底座、一个摄像头装置和一个密封条,所述抗压的密封球壳结构由两个半圆球壳通过所述密封条密封而成;所述四个辅助螺旋桨推进器固定安装在抗压的密封球壳结构球壳上,等距均匀分布于半球截面处;所述主螺旋桨推进器固定安装在抗压的密封球壳结构底部,安装轴线与辅助螺旋桨推进器安装轴线垂直,且经过球心;所述内部控制装置包括一个控制系统连接一个电源模块;所述锥形底座固定安装在抗压的密封球壳结构底部,对主螺旋桨推进器进行保护;所述摄像头装置安装在抗压的密封球壳结构内部平台上,便于水下侦查。
4.上述专利提供的水下球形机器人,仅能适用于浅水水域的探测,且仅能做水平面和垂直水平面的移动和转动,能够进行探测的领域极其有限。
5.现有技术中还有如公开号为cn112722219a的中国专利公开的一种水下探测机器人,包括主舱模块、背鳍、信号发射接收装置、电机和亚克力玻璃罩,所述主舱模块的后侧面安装有探照灯,且探照灯的左侧设置有背鳍,并且背鳍的一端与主舱模块相连接,所述背鳍的左侧设置有信号发射接收装置,且信号发射接收装置的一端与主舱模块相连接,所述电机固定在尾舱的内部,所述主舱模块的前后两侧均安装有第二三推进装置,且第二三推进装置由第二螺旋桨、第二桨叶罩、第二固定支架和旋转连杆组成,并且第二螺旋桨通过转轴与电机相连接,所述第二三推进装置通过旋转连杆与主舱模块相连接,所述第二桨叶罩通过第二固定支架固定在主舱模块的外部,所述主舱模块的右侧安装有亚克力玻璃罩,且亚克力玻璃罩的内部安装有摄影平台,所述摄影平台包括gps定位装置和摄像头,且摄影平台上通过卡槽与gps定位装置相连接,并且摄像头位于主舱模块的头舱内部,所述旋转连杆位于头舱两侧对称分布。
6.上述专利公开的水下探测机器人,具有较大的体型和回转半径,适用于开放水域,但是在对封闭环境进行探测时,极易发生机体移动、回转受阻,以及与障碍物发生碰撞、钩挂、挤压状况。
技术实现要素:
7.为解决现有技术中存在的问题,本发明提供了一种用于水下探测的球形机器人及控制方法。
8.一种用于水下探测的球形机器人,包括球形外壳,以及设于球形外壳内的水密电子舱和若干个推进器,所述球形外壳上设有供水流流入、流出的通孔;所述球形外壳内部可拆卸连接有结构框架,所述水密电子舱和若干个推进器均活动固定在结构框架上;
9.所述推进器包括若干个平行于水密电子舱轴向的第一推进器、以及若干个垂直于水密电子舱轴向的第二推进器,所述第一推进器、第二推进器围绕所述水密电子舱间隔设置。
10.具体的,将水密电子舱和若干个推进器的结构全部设于球形外壳的内部的结构使得球形机器人的球形外观保持良好,此种结构下,球形机器人回转方便,且不会与障碍物发生钩挂;
11.推进器环绕水密电子舱设置,即推进器设置于球形外壳与水密电子舱之间的缝隙中,此种结构能够使得球形机器人的体积更加紧凑,有效的缩小了球形机器人的体积;
12.同时,推进器还包括与水密电子舱轴向平行的第一推进器、以及与水密电子舱轴向垂直的第二推进器,且第一推进器和第二推进器环绕水密电子舱间隔设置,此种结构下,推进器的进水口和出水口分布于球形外壳的各个方向上,通过各控制推进器内螺旋桨的转速,可以实现球形机器人各个方向上的移动和转动(通常是六个方向上的移动和转动)。
13.此外,由于水密电子舱内设有多个电子元器件,故整体采用防水设计。
14.优选的,所述推进器包括固定管,所述固定管的内壁上固定有螺旋桨以及用于驱动螺旋桨转动的无刷电机,所述固定管的外壁上设有用于将推进器活动固定在结构框架上的固定件;所述固定管的两侧端面上均可拆卸固定有水流导管,所述水流导管远离固定管的一端设有进水口或出水口,所述进水口或出水口与球形外壳上的通孔适配。
15.具体的,在无刷电机的驱动下,螺旋桨转动推动水流,从而反向推动球形机器人的运动。
16.优选的,所述固定管内还设有用于减小水流阻力的导流支架,所述导流支架设于螺旋桨相对的两侧。
17.优选的,所述结构框架包括两个固定环,两个固定环之间通过若干个导轨固定,每一个导轨上均活动固定有一个推进器;所述水密电子舱与结构框架套接、且能沿着导轨滑动;
18.所述球形外壳为若干块可拆卸的壳体拼接而成,每一块所述壳体均与一个固定环可拆卸连接。
19.具体的,由于水密电子舱内设置有电池包、控制器、上位机、无刷电子调速器、短程通讯模块、图像采集模块等多个器件,因此当球形机器人工作一段时间之后,需要对水密电子舱内的各器件进行检修、调试和替换,在水密电子舱可沿着导轨滑动的结构下,当需要对水密电子舱进行检修时,无需拆卸整个球形机器人,只需要将水密电子舱抽出即可;
20.此外,球形外壳由多个壳体拼接而成的结构能方便水密电子舱和各推进器的安装。
21.优选的,所述水密电子舱包括中空的筒状的密封舱,所述密封舱至少一个端面上设有观察窗,所述球形外壳上与观察窗适配的方位设有观察孔;
22.所述密封舱远离观察窗的一端设有密封滑动架,所述密封滑动架的外周上设有能沿着导轨滑动的滑块;所述密封舱设有观察窗的一端还设有用于将密封舱可拆卸固定在固
定环上的密封固定架,所述密封固定架上设有用于避让观察窗的避让孔。
23.具体的,球形机器人在进行工作时,通常需要利用图像采集模块收集所处环境的各项信息,图像采集模块设置与密封舱内,所以需要设置观察窗的结构。
24.优选的,所述密封舱内设有用于供电的电池包、用于控制球形机器人运动的控制器、无刷电子调速器、短程通讯模块以及用于采集图像信息的图像采集模块,所述图像采集模块设于密封舱内靠近观察窗的一端。
25.一种用于水下探测的球形机器人的控制方法,采用如上任一项所述的用于水下探测的球形机器人,所述水密电子舱内设有图像采集模块和控制器;
26.所述控制方法包括如下步骤:
27.s1确定待探测点,规划球形机器人从出发点到待探测点之间的预期路径,启动球形机器人;
28.s2在球形机器人行进的过程中,利用图像采集模块实时采集待探测点的图像信息以及待探测点与球形机器人当前位置之间的距离信息;
29.s3根据步骤s2中采集的图像信息和距离信息,利用图像采集模块内的计算模块,计算球形机器人当前位置与预期路径的偏移距离和角度,并将计算结果发送至控制器;
30.s4所述控制器接收到步骤s3的计算结果后,利用搭载的pid控制程序对偏移距离和角度进行解耦,并计算得出控制各推进器转速的pwm波的脉宽,利用不同脉宽的pwm波控制各推进器的转速使球形机器人回到预期路径上。
31.具体的,在球形机器人的工作过程中,尽管预先规划好了行进的预期路径,但是由于在行进的过程中环境总是会对球形机器人造成干扰,使其偏离预期路径,因此,需要实时检测球形及其人偏离预期路径的距离和角度,对球形机器人的运动进行实时的调节,使其回到预期路径上。
32.通过不同脉宽的pwm波对各推进器的转速进行控制的前提,是需要的出pwm波的脉宽与瞬时速度之间的传递函数,而要得出pwm波的脉宽与瞬时速度之间的传递函数需要先得出pwm波脉宽与无刷电机转速之间的关系、单各推进器的电机转速与推力之间的关系、单各推进器的推力与球形机器人整体受到的合力与合力矩之间的关系以及机器人的动力学特性。
33.优选的,所述图像采集模块包括芯片fpga,所述控制器为stm32控制器,所述图像采集模块通过拍摄图片或视频获得图像信息。
34.具体的,通过芯片fpga与stm32控制器的结合使得图像采集模块极具有拍摄图片的功能,同时还具有拍摄视频的功能,通过拍摄图片和视频获得的图像信息比仅仅通过拍摄图片获得的图像信息更加的全面。
35.优选的,所述图像采集模块还包括用于扩展存储量的ddr芯片。
36.具体的,芯片fpga内部的存储量有限,而为了储存图片或视频需要图像采集模块具有较大的存储空间,因此外接ddr用于扩展图像采集模块的存空间是合适的。
37.与现有技术相比,本发明的有益之处在于:
38.(1)通过将水密电子舱设于球形外壳的内部形成双层结构,将若干个推进器设于球形外壳和水密电子舱之间使得整个球形机器人结构更加紧凑、且能保持球形的外观使得球形及其人在运行的过程不会出现钩挂的故障,同时第一推进器和第二推进器环绕水密电
子舱间隔设置的结构使得球形及其人具有较大的运动自由度,几乎能满足所需的各个方向的移动和转动;
39.(2)利用图像采集模块通过拍摄图片和视频采集图像信息,控制器通过采集的图像信息实时调整球形机器人的运动状态的控制方法,能够使得球形机器人在面对各种复杂环境是依旧能够稳定的行进并完成探测工作。
附图说明
40.图1为本发明提供的用于水下探测的球形机器人的外观结构示意图;
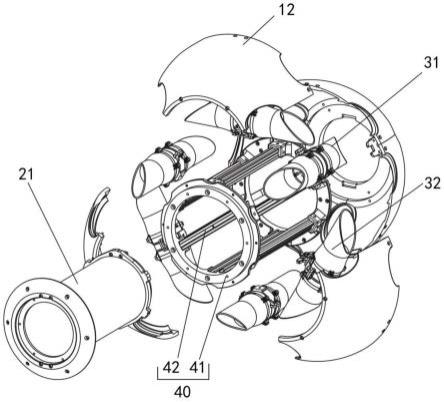
41.图2为本发明提供的用于水下探测的球形机器人的部分零件的装配示意图;
42.图3为本发明提供的用于水下探测的球形机器人的爆炸图;
43.图4为本发明提供的用于水下探测的球形机器人的推进器的全剖示意图;
44.图5本发明提供的用于水下探测的球形机器人的推进器的爆炸图;
45.图6为本发明提供的用于水下探测的球形机器人的水密电子舱的装配示意图;
46.图7为本发明提供的用于水下探测的球形机器人的水密电子舱的爆炸图;
47.图8为本发明提供的用于水下探测的球形机器人的控制方法的框图;
48.图9为本发明提供的用于水下探测的球形机器人的图像采集模块的视频采集系统结构图。
具体实施方式
49.下面结合附图以及具体实施例对本发明做进一步说明。
50.如图1所示,用于水下探测的球形机器人,包括球形外壳10,以及设于球形外壳10内的水密电子舱20和六个推进器,所述球形外壳10上设有供水流流入、流出的通孔11;
51.如图2所示,所述球形外壳10内部可拆卸连接有结构框架40,所述水密电子舱20和若干个推进器均活动固定在结构框架40上;
52.如图3所示,所述推进器包括三个平行于水密电子舱20轴向的第一推进器31、以及三个垂直于水密电子舱20轴向的第二推进器32,所述第一推进器31、第二推进器32围绕所述水密电子舱20间隔设置。
53.将水密电子舱20和若干个推进器的结构全部设于球形外壳10的内部的结构使得球形机器人的球形外观保持良好,此种结构下,球形机器人回转方便,且不会与障碍物发生钩挂;
54.推进器环绕水密电子舱20设置,即推进器设置于球形外壳10与水密电子舱20之间的缝隙中,此种结构能够使得球形机器人的体积更加紧凑,有效的缩小了球形机器人的体积;
55.同时,推进器还包括与水密电子舱20轴向平行的第一推进器31、以及与水密电子舱20轴向垂直的第二推进器32,且第一推进器31和第二推进器32环绕水密电子舱20间隔设置,此种结构下,推进器的进水口和出水口分布于球形外壳10的各个方向上,通过各控制推进器内螺旋桨34的转速,可以实现球形机器人各个方向上的移动和转动,包括球形机器人的进退、横移、潜浮,且球形机器人的进退方向、横移方向、潜浮方向两两垂直,此外球形机器人的转动方向是以进退方向为轴向的转动、即横倾,以横移方向为轴向的转动、即纵摇,
以潜浮方向为轴向的转动,即艉摇。
56.此外,由于水密电子舱20内设有多个电子元器件,故整体采用防水设计。
57.如图4、5所示,所述推进器包括固定管33,所述固定管33的内壁上固定有螺旋桨34以及用于驱动螺旋桨34转动的无刷电机35,所述固定管33的外壁上设有用于将推进器活动固定在结构框架40上的固定件36;所述固定管33的两侧端面上均可拆卸固定有水流导管37,所述水流导管37远离固定管33的一端设有进水口或出水口,所述进水口或出水口与球形外壳10上的通孔11适配。
58.在无刷电机35的驱动下,螺旋桨34转动推动水流,从而反向推动球形机器人的运动。
59.所述固定管33内还设有用于减小水流阻力的导流支架38,所述导流支架38设于螺旋桨34相对的两侧。
60.所述结构框架40包括两个固定环41,两个固定环41之间通过六根导轨42固定,每一个导轨42上均活动固定有一个推进器;所述水密电子舱20与结构框架40套接、且能沿着导轨42滑动;
61.所述球形外壳10为六块可拆卸的壳体12拼接而成,每一块所述壳体12均与一个固定环41可拆卸连接。
62.由于水密电子舱20内设置有电池包、控制器、上位机、无刷电子调速器、短程通讯模块、图像采集模块等多个器件,因此当球形机器人工作一段时间之后,需要对水密电子舱20内的各器件进行检修、调试和替换,在水密电子舱20可沿着导轨42滑动的结构下,当需要对水密电子舱20进行检修时,无需拆卸整个球形机器人,只需要将水密电子舱20抽出即可;
63.此外,球形外壳10由多个壳体12拼接而成的结构能方便水密电子舱20和各推进器的安装。
64.如图6、7所示,所述水密电子舱20包括中空的筒状的密封舱21,所述密封舱21至少一个端面上设有观察窗22,所述球形外壳10上与观察窗22适配的方位设有观察孔;
65.所述密封舱21远离观察窗22的一端设有密封滑动架23,所述密封滑动架23的外周上设有能沿着导轨42滑动的滑块24;所述密封舱21设有观察窗22的一端还设有用于将密封舱21可拆卸固定在固定环41上的密封固定架25,所述密封固定架25上设有用于避让观察窗22的避让孔26。
66.球形机器人在进行工作时,通常需要利用图像采集模块收集所处环境的各项信息,图像采集模块设置与密封舱21内,所以需要设置观察窗22的结构。
67.所述密封舱21内设有用于供电的电池包、用于控制球形机器人运动的控制器、无刷电子调速器、短程通讯模块以及用于采集图像信息的图像采集模块,所述图像采集模块设于密封舱21内靠近观察窗22的一端。
68.如图8所示,一种用于水下探测的球形机器人的控制方法,采用如上任一项所述的用于水下探测的球形机器人,所述水密电子舱20内设有图像采集模块和控制器;
69.所述控制方法包括如下步骤:
70.s1确定待探测点,规划球形机器人从出发点到待探测点之间的预期路径,启动球形机器人;
71.s2在球形机器人行进的过程中,利用图像采集模块实时采集待探测点的图像信息
以及待探测点与球形机器人当前位置之间的距离信息;
72.s3根据步骤s2中采集的图像信息和距离信息,利用图像采集模块内的计算模块,计算球形机器人当前位置与预期路径的偏移距离和角度,并将计算结果发送至控制器;
73.s4所述控制器接收到步骤s3的计算结果后,利用搭载的pid控制程序对偏移距离和角度进行解耦,并计算得出控制各推进器转速的pwm波的脉宽,利用不同脉宽的pwm波控制各推进器的转速使球形机器人回到预期路径上。
74.在球形机器人的工作过程中,尽管预先规划好了行进的预期路径,但是由于在行进的过程中环境总是会对球形机器人造成干扰,使其偏离预期路径,因此,需要实时检测球形及其人偏离预期路径的距离和角度,对球形机器人的运动进行实时的调节,使其回到预期路径上。
75.通过不同脉宽的pwm波对各推进器的转速进行控制的前提,是需要的出pwm波的脉宽与瞬时速度之间的传递函数,而要得出pwm波的脉宽与瞬时速度之间的传递函数需要先得出pwm波脉宽与无刷电机35转速之间的关系、单各推进器的电机转速与推力之间的关系、单各推进器的推力与球形机器人整体受到的合力与合力矩之间的关系以及机器人的动力学特性。
76.所述图像采集模块包括芯片fpga,所述控制器为stm32控制器,所述图像采集模块通过拍摄图片或视频获得图像信息。
77.通过芯片fpga与stm32控制器的结合使得图像采集模块极具有拍摄图片的功能,同时还具有拍摄视频的功能,通过拍摄图片和视频获得的图像信息比仅仅通过拍摄图片获得的图像信息更加的全面。
78.所述图像采集模块还包括用于扩展存储量的ddr芯片。
79.芯片fpga内部的存储量有限,而为了储存图片或视频需要图像采集模块具有较大的存储空间,因此外接ddr用于扩展图像采集模块的存空间是合适的。
80.如图9所示,所述图像采集模块进行视频拍时的具体过程为,摄像头拍摄的视频被dc fifo(采集存储器)采集后先通过wr fifo(写出储存器)进行数据缓存,然后写入ddr3,进行缓存一定帧数的图像,随后,再从ddr3读出通过rd fifo(读入储存器)的图像数据,最后,通过vga显示图像,此外,fifo还能起到跨时钟域数据同步的作用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。