技术特征:
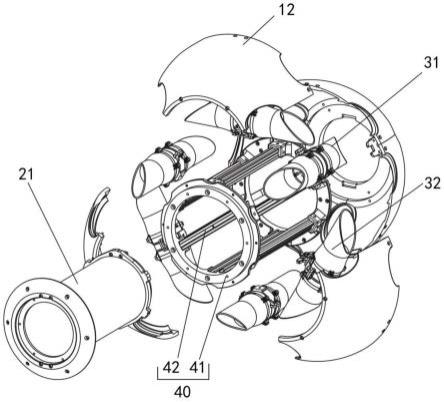
1.一种用于水下探测的球形机器人,包括球形外壳,以及设于球形外壳内的水密电子舱和若干个推进器,其特征在于,所述球形外壳上设有若干个供水流流入、流出的通孔;所述球形外壳内部可拆卸连接有结构框架,所述水密电子舱和若干个推进器均活动固定在结构框架上;所述推进器包括若干个平行于水密电子舱轴向的第一推进器、以及若干个垂直于水密电子舱轴向的第二推进器,所述第一推进器、第二推进器围绕所述水密电子舱间隔设置。2.根据权利要求1所述的用于水下探测的球形机器人,其特征在于,所述推进器包括固定管,所述固定管的内壁上固定有螺旋桨以及用于驱动螺旋桨转动的无刷电机,所述固定管的外壁上设有用于将推进器活动固定在结构框架上的固定件;所述固定管的两侧端面上均可拆卸固定有水流导管,所述水流导管远离固定管的一端设有进水口或出水口,所述进水口或出水口与球形外壳上的通孔适配。3.根据权利要求2所述的用于水下探测的球形机器人,其特征在于,所述固定管内还设有用于减小水流阻力的导流支架,所述导流支架设于螺旋桨相对的两侧。4.根据权利要求1所述的用于水下探测的球形机器人,其特征在于,所述结构框架包括两个固定环,两个固定环之间通过若干个导轨固定,每一个导轨上均活动固定有一个推进器;所述水密电子舱与结构框架套接、且能沿着导轨滑动;所述球形外壳为若干块可拆卸的壳体拼接而成,每一块所述壳体均与一个固定环可拆卸连接。5.根据权利要求4所述的用于水下探测的球形机器人,其特征在于,所述水密电子舱包括中空的筒状的密封舱,所述密封舱至少一个端面上设有观察窗,所述球形外壳上与观察窗适配的方位设有观察孔。6.根据权利要求5所述的用于水下探测的球形机器人,其特征在于,所述密封舱远离观察窗的一端设有密封滑动架,所述密封滑动架的外周上设有能沿着导轨滑动的滑块;所述密封舱设有观察窗的一端还设有用于将密封舱可拆卸固定在固定环上的密封固定架,所述密封固定架上设有用于避让观察窗的避让孔。7.根据权利要求5所述的用于水下探测的球形机器人,其特征在于,所述密封舱内设有用于供电的电池包、用于控制球形机器人运动的控制器、无刷电子调速器、短程通讯模块以及用于采集图像信息的图像采集模块,所述图像采集模块设于密封舱内靠近观察窗的一端。8.一种用于水下探测的球形机器人的控制方法,其特征在于,采用如权利要求1-7任一项所述的用于水下探测的球形机器人,所述水密电子舱内设有图像采集模块和控制器;所述控制方法包括如下步骤:s1确定待探测点,规划球形机器人从出发点到待探测点之间的预期路径,启动球形机器人;s2在球形机器人行进的过程中,利用图像采集模块实时采集待探测点的图像信息以及待探测点与球形机器人当前位置之间的距离信息;s3根据步骤s2中采集的图像信息和距离信息,利用图像采集模块内的计算模块,计算球形机器人当前位置与预期路径的偏移距离和角度,并将计算结果发送至控制器;s4所述控制器接收到步骤s3的计算结果后,利用搭载的pid控制程序对偏移距离和角
度进行解耦,并计算得出控制各推进器转速的pwm波的脉宽,利用不同脉宽的pwm波控制各推进器的转速使球形机器人回到预期路径上。9.根据权利要求8所述的用于水下探测的球形机器人的控制方法,其特征在于,所述图像采集模块包括芯片fpga,所述控制器为stm32控制器,所述图像采集模块通过拍摄图片或视频获得图像信息。10.根据权利要求9所述的用于水下探测的球形机器人的控制方法,其特征在于,所述图像采集模块还包括用于扩展存储量的ddr芯片。
技术总结
本发明公开了一种用于水下探测的球形机器人及控制方法,其中包括用于水下探测的球形机器人,包括球形外壳,以及设于球形外壳内的水密电子舱和若干个推进器,所述球形外壳上设有若干个供水流流入、流出的通孔;所述球形外壳内部可拆卸连接有结构框架,所述水密电子舱和若干个推进器均活动固定在结构框架上;所述推进器包括若干个平行于水密电子舱轴向的第一推进器、以及若干个垂直于水密电子舱轴向的第二推进器,所述第一推进器、第二推进器围绕所述水密电子舱间隔设置。本发明还包括用于对前述用于水下探测的球形机器人的运动进行控制的控制方法。制的控制方法。制的控制方法。
技术研发人员:黄豪彩 黄朴文 刘睿捷 徐敬泽华
受保护的技术使用者:浙江大学
技术研发日:2022.05.17
技术公布日:2022/8/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。