1.本实用新型属于机床技术领域,涉及一种工件正反面识别翻转装置。
背景技术:
2.随着机械化和自动化的发展,工件加工过程逐渐实现了自动化。对于非两端对称的工件,在加工过程中往往需要将工件的正反面进行识别并摆正。
3.比如在工件转运储存的过程中,工件放置在料盘上,料盘再堆叠起来,一旦出现工件装反,将引起料盘不能放平,甚至会引起料盘跌落。即使不进行料盘堆叠,如果将料盘送到机床处进行自动上料加工,而料盘中存在有装反的工件,该工件在上料后也会是装反状态,不仅会加工出废品而且容易引起撞刀事故。为了避免工件装反,可以采用人工监督纠正,但是效率不高且容易出错。
技术实现要素:
4.本实用新型的目的是针对现有技术存在的上述问题,提出了一种工件正反面识别翻转装置,解决的技术问题是:如何提高工件正反面识别和纠正的准确性。
5.本实用新型的目的可通过下列技术方案来实现:
6.一种工件正反面识别翻转装置,配合送料机械手使用,所述送料机械手的手爪能够在水平状态和竖直状态来回切换,包括工作台板,其特征在于,还包括固定在工作台板上的旋转驱动件,所述旋转驱动件的旋转轴朝上并固定有机械手爪,所述旋转驱动件能够驱动机械手爪旋转180
°
,所述工作台板上位于旋转驱动件的一侧开设有供工件插入的定位孔,所述送料机械手能够在定位孔与机械手爪之间移动,所述工作台板的下方固定有与定位孔对应并用于感应工件的位置传感器。
7.以具有凸肩的轴类工件为例,该工件具有长轴端和短轴端,长轴端和短轴端分别位于凸肩两侧且轴长不同,以短轴端的端面为正面,以长轴端的端面为反面。工件正反面识别翻转装置工作时,送料机械手的手爪处于水平状态,待检测料盘中的工件处于竖直状态,送料机械手的手爪抓取工件的凸肩处并将工件插入到定位孔中,工件凸肩抵靠在工作台板的上表面上。如果工件处于正面朝上,长轴端插入到定位孔中,长轴端会被位置传感器感应到,则旋转驱动件不动作,送料机械手将工件取出放置到已检测料盘中;如果工件处于反面朝上,短轴端插入到定位孔中,由于短轴端的长度小于长轴端的长度,导致位置传感器无法感应到工件,则送料机械手将定位孔中的工件取出,送料机械手的手爪切换到竖直状态,工件处于水平状态,然后将工件放置到机械手爪中,机械手爪夹紧工件后旋转驱动件驱动机械手爪旋转180
°
,即工件翻转180
°
,短轴端和长轴端的位置对调,然后送料机械手将工件取出机械手爪并将工件竖直放置到料盘中,从而实现工件正反面的识别和纠正。由于位置传感器感应准确性好,且旋转驱动件能够对工件实现翻转。因此,相比于人工识别和纠正,采用本工件正反面识别翻转装置提高了工件正反面的识别和纠正的准确性。
8.在上述的工件正反面识别翻转装置中,所述工作台板的下方固定有与工作台板贴
靠的防护罩,所述位置传感器位于防护罩内。防护罩对位置传感器具有保护作用,使位置传感器工作稳定,有利于保证本工件正反面识别翻转装置工作的准确性。
9.在上述的工件正反面识别翻转装置中,所述工作台板的四角上分别固定有立柱,四根立柱均位于防护罩内侧,且防护罩固定在立柱上。这样使防护罩固定稳定,从而保证防护罩对位置传感器的保护作用,有利于保证本工件正反面识别翻转装置工作的准确性。
10.在上述的工件正反面识别翻转装置中,所述工作台板的下方设置有连接板,所述连接板上开设有沿定位孔径向延伸呈条状的调节孔,所述位置传感器具有固定部,所述固定部上螺纹连接有上螺母和下螺母,所述固定部穿设在调节孔中,所述上螺母和下螺母分别位于调节孔的上方和下方,且上螺母和下螺母均抵靠在连接板上。
11.通过拧动上螺母和下螺母可以调节位置传感器的上下位置,从而更好的适应工件的轴长,保证检测的准确性。通过沿定位孔径向延伸呈条状的调节孔,可以实现位置传感器在定位孔径向上的位置调节,从而更好的适应工件的直径,保证检测的准确性。
12.在上述的工件正反面识别翻转装置中,所述连接板呈l型,所述连接板固定在工作台板上或者防护罩上。这样可以使连接板结构稳定,从而使位置传感器工作稳定。
13.在上述的工件正反面识别翻转装置中,相邻两根立柱之间连接有固定梁。这样可以使工作台板安装稳定,从而使位置传感器工作稳定,有利于保证本工件正反面识别翻转装置工作的准确性。
14.在上述的工件正反面识别翻转装置中,所述定位孔的上孔沿处设置有倒角。倒角的设置方便将工件插入到定位孔中,避免工件未插入到定位孔中而引起的误判,有利于保证本工件正反面识别翻转装置工作的准确性。
15.在上述的工件正反面识别翻转装置中,所述旋转驱动件为摆缸,所述旋转驱动件的壳体上固定有定位块,所述旋转驱动件的旋转轴上固定有限位块,所述限位块能够抵靠在定位块上。摆缸动作准确稳定且反应迅速,定位块与限位块的配合能够对旋转驱动件的转动角度进行定位,减少转动角度的偏差,能够使工件翻转过程快速准确的进行,保证了工作的准确性并提高了工作效率。
16.与现有技术相比,本实用新型具有以下优点:
17.设置定位孔用于工件的定位,设置位置传感器用于检测,设置旋转驱动件和机械手爪用于翻转纠正,相比于人工识别和纠正,采用本工件正反面识别翻转装置提高了工件正反面的识别和纠正的准确性和工作效率。设置立柱和固定梁使工作台板安装稳定,设置防护罩对位置传感器进行保护,连接板上设置调节孔且位置传感器上设置上螺母和下螺母,使位置传感器位置可调,定位孔的上孔沿处设置倒角,有利于保证装置工作的准确性,还能够提高工作效率。
附图说明
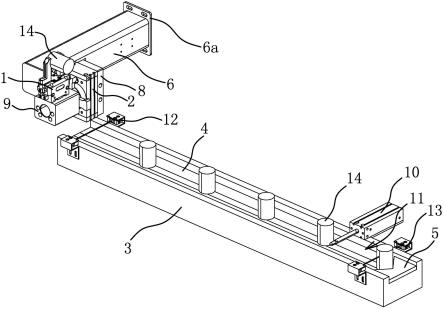
18.图1是本工件正反面识别翻转装置的立体图;
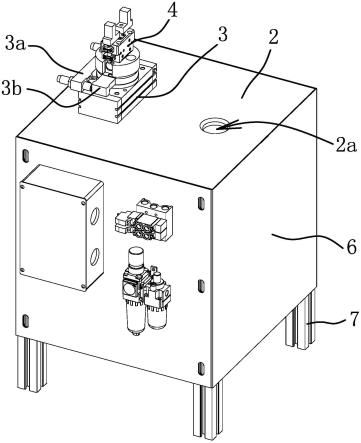
19.图2是本工件正反面识别翻转装置隐藏防护罩后的立体图;
20.图3是本工件正反面识别翻转装置中连接板和位置传感器的立体图;
21.图4是本工件正反面识别翻转装置工作过程中工件正面朝上时的立体图;
22.图5是本工件正反面识别翻转装置工作过程中工件正面朝上时位置传感器处的局
部剖视图;
23.图6是本工件正反面识别翻转装置工作过程中工件正面朝下时位置传感器处的局部剖视图;
24.图7是本工件正反面识别翻转装置工件翻转时的立体图。
25.图中,1、工件;1a、凸肩;1b、长轴端;1c、短轴端;2、工作台板;2a、定位孔;2b、倒角;3、旋转驱动件;3a、定位块;3b、限位块;4、机械手爪;5、位置传感器;5a、固定部;6、防护罩;7、立柱;8、连接板;8a、调节孔;9、上螺母;10、下螺母;11、固定梁。
具体实施方式
26.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
27.实施例一
28.如图1-图7所示,一种工件正反面识别翻转装置,配合送料机械手使用,包括工作台板2和固定在工作台板2上的旋转驱动件3。送料机械手[图中未出示]可以为桁架机械手或者关节机器手,送料机械手的手爪能够在水平状态和竖直状态来回切换,即送料机械手的手爪夹持工件1后能够使工件1在竖直状态和水平状态之间来回切换。送料机械手的结构可参考公告号为:cn213971270u的专利文献,此处不再详述。送料机械手安装在桁架机器人或者关节机器人,使得送料机械手能够在待检测料盘、已检测料盘和工作台板2之间移动。
[0029]
工作台板2的下方固定有与工作台板2贴靠的防护罩6,工作台板2的四角上分别固定有立柱7,四根立柱7位于防护罩6内侧,且防护罩6固定在立柱7上,相邻两根立柱7之间连接有固定梁11。旋转驱动件3固定在工作台板2的上表面上。旋转驱动件3可以为摆缸,也可以为电机。旋转驱动件3的旋转轴朝上并固定有机械手爪4,旋转驱动件3能够驱动机械手爪4旋转180
°
。旋转驱动件3的壳体上固定有定位块3a,旋转驱动件3的旋转轴上固定有限位块3b,限位块3b能够抵靠在定位块3a上。定位块3a有两个,限位块3b在两个定位块3a之间转动形成180
°
限位。
[0030]
工作台板2上位于旋转驱动件3的一侧开设有供工件1插入的定位孔2a,定位孔2a的上孔沿处设置有倒角2b。送料机械手还能够在定位孔2a与机械手爪4之间移动。工作台板2的下方固定有与定位孔2a对应并用于感应工件1的位置传感器5。位置传感器5可以为接触式传感器,也可以为接近式传感器,如型号为e2e-x2d1-u-z-2m的接近开关。工作台板2的下方设置有连接板8,连接板8和位置传感器5均位于防护罩6内。连接板8呈l型,连接板8的一端固定在工作台板2上或者防护罩6上。连接板8上开设有沿定位孔2a径向延伸呈条状的调节孔8a,位置传感器5具有固定部5a,固定部5a上螺纹连接有上螺母9和下螺母10,固定部5a穿设在调节孔8a中,上螺母9和下螺母10分别位于调节孔8a的上方和下方,且上螺母9和下螺母10均抵靠在连接板8上。
[0031]
旋转驱动件3、机械手爪4、位置传感器5以及送料机械手均与机床的控制器连接,控制器能够控制旋转驱动件3、机械手爪4和送料机械手动作,位置传感器5在感应到工件1时能够向控制器发送检测信号。在工件1插入到定位孔2a中后,如果位置传感器5感应到工件1,则旋转驱动件3不动作,送料机械手将工件1取出并放置到已检测料盘中。在工件1插入到定位孔2a中后,如果位置传感器5没有感应到工件1,则送料机械手将定位孔2a中的工件1
取出并将工件1水平放置到机械手爪4中,且旋转驱动件3驱动机械手爪4旋转180
°
,然后送料机械手再将工件1从机械手爪4中取出,并将工件1竖直放置到已检测料盘中。
[0032]
以具有凸肩1a的轴类工件1为例,该工件1具有长轴端1b和短轴端1c,长轴端1b和短轴端1c分别位于凸肩1a两侧且轴长不同,以短轴端1c的端面为正面,以长轴端1b的端面为反面。工件正反面识别翻转装置工作时,送料机械手的手爪处于水平状态,待检测料盘中的工件1处于竖直状态,送料机械手的手爪抓取工件1的凸肩1a处并将工件1插入到定位孔2a中,工件1凸肩1a抵靠在工作台板2的上表面上。如果工件1处于正面朝上,长轴端1b插入到定位孔2a中,长轴端1b会被位置传感器5感应到,则旋转驱动件3不动作,送料机械手将工件1取出放置到已检测料盘中;如果工件1处于反面朝上,短轴端1c插入到定位孔2a中,由于短轴端1c的长度小于长轴端1b的长度,导致位置传感器5无法感应到工件1,则送料机械手将定位孔2a中的工件1取出,送料机械手的手爪切换到竖直状态,工件1处于水平状态,然后将工件1放置到机械手爪4中,机械手爪4夹紧工件1后旋转驱动件3驱动机械手爪4旋转180
°
,即工件1翻转180
°
,短轴端1c和长轴端1b的位置对调,然后送料机械手将工件1取出机械手爪4并将工件1竖直放置到已检测料盘中,从而实现工件1正反面的识别和纠正。由于位置传感器5感应准确性好,且旋转驱动件3能够实现对工件1准确的翻转。因此,相比于人工识别和纠正,采用本工件正反面识别翻转装置提高了工件1正反面的识别和纠正的准确性。
[0033]
本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。