1.本发明涉及井下检测术领域,具体是指一种井内激光测量及毒气报警的检测装置及其使用方法。
背景技术:
2.随着智慧城市建设的发展,为适应地下管线三维动态建模系统的要求,在各地下管线普查项目中,对地下管线空间信息的数据要求越来越详细。很多信息都需要人工下井勘查测量采集。大多井内存在有毒气、垃圾、积水潮湿等,因此下井作业存在许多安全隐患。目前不下井的的测量方法是吊(打)开井盖,用激光测量仪手动测量、摄像、拍照,由于测量设备大、且手工操作精度低,每个井的测量勘探都需要三个以上人配合才能完工。遇到大的沉重的井盖,还需要专用吊装设备吊开井盖才能进行测绘工作,还有一定的危险,且精度低,效率低。因此,需要研究管井内数据信息准确、高效的检测方法和手段,提高检测准确性。
技术实现要素:
3.本发明要解决的技术问题是克服以上的技术缺陷,提供一种井内激光测量及毒气报警的检测装置及其使用方法。
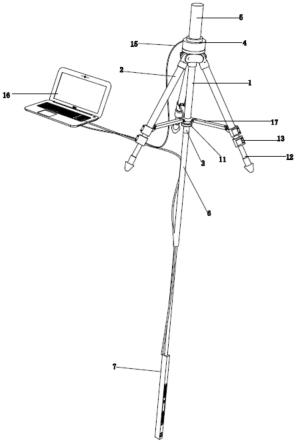
4.为解决上述技术问题,本发明提供的技术方案为:一种井内激光测量及毒气报警的检测装置,包括安装套管,所述安装套管的外侧设有三个角度可调的支撑腿,所述安装套管内转动设有连接杆,所述连接杆的上端设有角度测量编码器,所述角度测量编码器的上端设有手柄,所述连接杆的下端延伸至安装套管下方且连接杆的下端设有调节杆,所述调节杆的下端设有探头,所述探头的内部设有主控板,所述主控板上设有有害气体传感器,所述探头的侧面设有摄像头和激光测距仪。
5.优选的,所述调节杆由六节0.5m长的不锈钢刻度杆连接,且相邻两节所述刻度杆之间通过螺纹连接为一体。
6.优选的,所述安装套管上套设有升降座,所述升降座螺纹连接有限定螺丝,所述升降座上圆周设有三个连杆,三个所述连杆远离升降座的一端分别与三个支撑腿铰接。
7.优选的,所述支撑腿的底端设有可延长的支撑脚,所述支撑腿上螺纹连接有用于限定支撑脚的调节栓。
8.优选的,所述探头的侧面设有若干led照明灯。
9.优选的,所述探头以及角度测量编码器上均设有数据传输线,所述数据传输线的输出端与计算机连接。
10.一种井内激光测量及毒气报警的检测装置的使用方法,具体包括以下步骤:
11.步骤一、将整个装置移动至井盖处,根据井下布线深度选择不同节的刻度杆组装成适宜长度的调节杆,将调节杆伸入到井盖吊装孔内并带动探头的下降,并根据需求移动升降座的高度调节三个支撑腿的支撑位置,此时摄像头可对井下状况进行摄像并上传至计
算机的显示屏上显示,同时有害气体传感器可将检测到的有害气体的信号传输至计算机上,检测人员可实时观察到井下的状况;
12.步骤二、启动激光测距仪,激光测距仪测得其与目标区端点的距离为a,检测人员转动手柄,转动手柄带动角度测量编码器以及连接杆的转动,连接杆的转动带动调节杆以及探头的转动,当激光测距仪对准目标区端点时停止手柄的转动,激光测距仪此时测得其与目标区端点的距离为b,且此时通过角度测量编码器测得的转角为α,主控板将采集到的目标区端点和目标区端点两端激光测量长度信号及转角解码器的转角数据信号,即可测得目标区的水平长度
13.步骤三、调整三条支撑腿的高度,使调节杆下端的探头下降至合适的位置,探头激光对应亮点时,此时记录最上端刻度杆处于井盖吊装孔处的刻度d,通过调节栓调节支撑脚的高度,从而使整个调节杆带动探头上移,当探头激光对应亮点时,此时记录最上端刻度杆处于井盖吊装孔处的刻度e,即可测得目标区的水平宽度b=e-d,目标区线管埋深数据h=d-b;
14.步骤四、通过数据传输线将测得的目标区的水平长度a、目标区的水平宽度b以及目标区线管埋深数据h上传至计算机内由专用软件自动建立地下管线三维动态建模。
15.本发明与现有技术相比的优点在于:本发明的一种井内激光测量及毒气报警的检测装置无需检测人员进行下井作业测量,避免了检测人员作业时的安全隐患;有通过设置害气体传感器可将检测到的有害气体的信号传输至计算机上,检测人员可实时观察到井下的状况;且仅需一名检测人员即可完成对井下目标区长度、宽度以及线管埋深的具体数据的测量,操作便捷、劳动强度较低,有利于井下管线三维动态建模,从而方便井下的实时监控。
附图说明
16.图1是本发明一种井内激光测量及毒气报警的检测装置的结构示意图。
17.图2是本发明一种井内激光测量及毒气报警的检测装置探头的内部结构示意图。
18.图3是本发明一种井内激光测量及毒气报警的检测装置井下目标区域的结构示意图。
19.图4是本发明一种井内激光测量及毒气报警的检测装置激光测距仪的使用原理示意图。
20.如图所示:1、安装套管,2、支撑腿,3、连接杆,4、角度测量编码器,5、手柄,6、调节杆,7、探头,8、主控板,9、摄像头,10、激光测距仪,11、升降座,12、支撑脚,13、调节栓,14、led照明灯,15、数据传输线,16、计算机,17、连杆。
具体实施方式
21.下面结合附图对本发明做进一步的详细说明。
22.下面结合附图来进一步说明本发明的具体实施方式。其中相同的零部件用相同的附图标记表示。
23.需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是
附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
24.为了使本发明的内容更容易被清楚地理解,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
25.结合附图,一种井内激光测量及毒气报警的检测装置,包括安装套管1,所述安装套管1 的外侧设有三个角度可调的支撑腿2,所述安装套管1内转动设有连接杆3,所述连接杆3的上端设有角度测量编码器4,所述角度测量编码器4的上端设有手柄5,所述连接杆3的下端延伸至安装套管1下方且连接杆3的下端设有调节杆6,所述调节杆6的下端设有探头7,所述探头7的内部设有主控板8,所述主控板8上设有有害气体传感器,所述探头7的侧面设有摄像头9和激光测距仪10。
26.所述调节杆6由六节0.5m长的不锈钢刻度杆连接,且相邻两节所述刻度杆之间通过螺纹连接为一体。
27.所述安装套管1上套设有升降座11,所述升降座11螺纹连接有限定螺丝,所述升降座 11上圆周设有三个连杆17,三个所述连杆17远离升降座11的一端分别与三个支撑腿2铰接。
28.所述支撑腿2的底端设有可延长的支撑脚12,所述支撑腿2上螺纹连接有用于限定支撑脚12的调节栓13。
29.所述探头7的侧面设有若干led照明灯14。
30.所述探头7以及角度测量编码器4上均设有数据传输线15,所述数据传输线15的输出端与计算机16连接。
31.一种井内激光测量及毒气报警的检测装置的使用方法,具体包括以下步骤:
32.步骤一、将整个装置移动至井盖处,根据井下布线深度选择不同节的刻度杆组装成适宜长度的调节杆6,将调节杆6伸入到井盖吊装孔内并带动探头7的下降,并根据需求移动升降座11的高度调节三个支撑腿2的支撑位置,此时摄像头9可对井下状况进行摄像并上传至计算机16的显示屏上显示,同时有害气体传感器可将检测到的有害气体的信号传输至计算机 16上,检测人员可实时观察到井下的状况;
33.步骤二、启动激光测距仪10,激光测距仪10测得其与目标区端点1的距离为a,检测人员转动手柄5,转动手柄5带动角度测量编码器4以及连接杆3的转动,连接杆3的转动带动调节杆6以及探头7的转动,当激光测距仪10对准目标区端点2时停止手柄的转动,激光测距仪10此时测得其与目标区端点2的距离为b,且此时通过角度测量编码器4测得的转角为α,主控板8将采集到的目标区端点1和目标区端点2两端激光测量长度信号及转角解码器的转角数据信号,即可测得目标区的水平长度
34.步骤三、调整三条支撑腿2的高度,使调节杆6下端的探头下降至合适的位置,探头7 激光对应亮点3时,此时记录最上端刻度杆处于井盖吊装孔处的刻度d,通过调节栓13调节支撑脚12的高度,从而使整个调节杆6带动探头7上移,当探头7激光对应亮点3时,此时记录最上端刻度杆处于井盖吊装孔处的刻度e,即可测得目标区的水平宽度b=e-d,目标区线管埋深数据h=d-b;
35.步骤四、通过数据传输线15将测得的目标区的水平长度a、目标区的水平宽度b以及目标区线管埋深数据h上传至计算机内由专用软件自动建立地下管线三维动态建模。
36.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。