自动驾驶车辆的管理装置
1.相关申请的交叉引用
2.本技术要求于2021年2月18日提交的日本专利申请no.2021-023872的优先权,该日本专利申请的包括说明书、权利要求书、说明书附图和说明书摘要在内的全部内容通过引用的方式而合并于此。
技术领域
3.在本说明书中,公开了一种自动驾驶车辆的管理装置。
背景技术:
4.一直以来,已知有一种代替由驾驶员进行的驾驶从而实施自动驾驶(也被称为自主驾驶)的自动驾驶车辆。在例如日本特开2016-57946号公报中,公开了一种使用了自动驾驶车辆的汽车共享服务。在车辆调配预约的时候,乘车预定时刻、和用户进行上下车的门廊(上车门廊以及下车门廊)的位置由用户指定。
5.此外,在日本特开2016-91411号公报中,基于使用者的当前位置以及车辆的当前位置等,从而决定能够针对使用者而进行车辆调配的自动驾驶车辆和乘车场所。
6.但是,被实施了车辆调配预约的自动驾驶车辆会考虑在乘车预定时刻前,例如在乘车预定时刻的一小时前,在乘车地或者接近乘车地的场所处进行等待,以便能够在乘车预定时刻切实地在乘车地进行等待。但是,在该等待场所为道路上的情况下,在等待用户的期间内等待中的自动驾驶车辆有可能会成为拥堵的原因。
7.因此,也考虑了将临近乘车地的、便利商店等商业设施的停车场作为等待场所的情况。但是,在该情况下,有可能会出现停车场拥挤等的、对于商业设施的使用者来说难以利用停车场的情况。
8.在本说明书中,公开了一种在抑制商业设施的停车场的便利性降低的同时,能够抑制自动驾驶车辆相对于乘车预定时刻的延迟到达的自动驾驶车辆的管理装置。
技术实现要素:
9.在本说明书中所公开的自动驾驶车辆的管理装置具备拥塞率计算部以及等待场所设定部。拥塞率计算部能够对分别被设置在多个商业设施中的停车场的拥塞率进行测定。等待场所设定部在临近停车场的、乘车预定时刻前的等待时间段中的拥塞率小于拥塞阈值的情况下,将临近停车场设定作为自动驾驶车辆的等待时间段中的等待场所,其中,所述临近停车场为,与针对被实施了车辆调配预约的自动驾驶车辆的预约信息中所包含的乘车地临近的停车场。
10.根据上述结构,由于当在临近停车场中有富余时,该停车场可作为自动驾驶车辆的等待场所而被使用,因此抑制了与临近停车场同时设置的商业设施的对于使用者的便利性的降低。
11.此外,在上述结构中,自动驾驶车辆的管理装置也可以具备车辆调配预约设定部
以及服务给予部。车辆调配预约设定部在车辆调配预约之时,在由用户所指定的乘车地为与分别被设置在多个商业设施中的停车场的任意一个均不相同的地点的情况下,针对用户而发送将与被指定的乘车地临近的停车场设定变更为乘车地的建议消息。服务给予部在乘车地被设定变更为建议消息中所表示的建议停车场时,针对于用户而给予能够在与建议停车场同时设置的商业设施中使用的优待服务。
12.根据上述结构,能够提升对于在将停车场作为自动驾驶车辆的等待场所而加以利用的商业设施中的、用户的购买意愿。
13.此外,在本说明书中所公开的自动驾驶车辆的管理装置具备拥塞率计算部、车辆调配预约设定部以及等待场所设定部。拥塞率计算部能够对分别被设置在多个商业设施中的停车场的拥塞率进行测定。车辆调配预约设定部基于针对自动驾驶车辆的过去的车辆调配预约信息中所包含的乘车地历史,从而按照时间段且按照地域而求出被指定为乘车地的指定频率。等待场所设定部在被设置于具有指定频率超过频率阈值的高频率时间段的高频率地域内的停车场的、高频率时间段前的等待时间段中的拥塞率小于拥塞阈值的情况下,将该停车场设定作为未被实施车辆调配预约的自动驾驶车辆的等待时间段中的等待场所。
14.根据上述结构,可实施提前使未被实施车辆调配预约的自动驾驶车辆在被设定作为乘车地的频率较高的时间段以及地域内进行等待的、所谓的预估车辆调配。由此,能够抑制自动驾驶车辆相对于乘车预定时刻的延迟到达。
15.根据在本说明书中所公开的自动驾驶车辆的管理装置,能够在抑制商业设施的停车场的便利性降低的同时,抑制自动驾驶车辆相对于乘车预定时刻的延迟到达。
附图说明
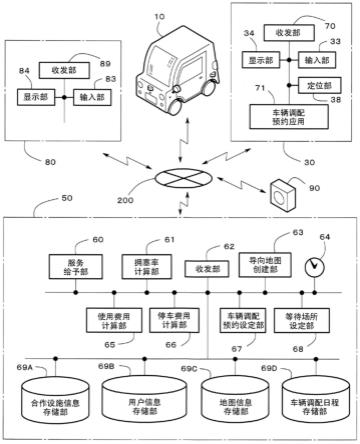
16.图1为对包含本实施方式所涉及的自动驾驶车辆的管理装置的、自动驾驶车辆管理系统进行例示的硬件结构图。
17.图2为对本实施方式所涉及的自动驾驶车辆进行例示的立体图。
18.图3为对本实施方式所涉及的自动驾驶车辆的功能模块进行例示的图。
19.图4为对本实施方式所涉及的自动驾驶车辆的管理系统进行例示的功能框图。
20.图5为对合作商店及其附设的停车场进行例示的俯视图。
21.图6为对启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(1/8),且为对可否实施车辆调配预约的询问画面进行例示的图。
22.图7为对启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(2/8),且为对目的地设定画面进行例示的图。
23.图8为对在启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(3/8),且为对目的地设定确认画面进行例示的图。
24.图9为对启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(4/8),且为对乘车地设定画面进行例示的图。
25.图10为对启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(5/8),且为显示了催促进行乘车地的变更的建议消息时的图。
26.图11为对启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(6/8),且为对乘车地变更确认画面进行例示的图。
27.图12为对启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(7/8),且为对乘车预定日期时间设定画面进行例示的图。
28.图13为对启动了车辆调配预约应用时的车辆调配预约过程进行说明的图(8/8),且为对车辆调配预约内容确认画面进行例示的图。
29.图14为对等待场所设定流程进行例示的图。
30.图15为对按照时间段来表示按照地域的乘车地设定频率的柱状图进行例示的图。
31.图16为对预期车辆调配流程进行例示的图。
具体实施方式
32.在下文中,使用附图来说明本公开的实施方式。在下文中进行说明的形状、材料、个数、以及数值为,用于说明的例示,能够根据自动驾驶车辆的管理装置以及自动驾驶车辆的管理系统的规格从而进行适当变更。此外,在下文中,在所有附图中,对于同等的要素将标记同一符号。
33.在图1中,例示了本实施方式所涉及的自动驾驶车辆的管理系统的硬件结构,在图4中例示了在上述系统的一部分中包含功能模块的图。本实施方式所涉及的自动驾驶车辆的管理系统被构成为,包括:自动驾驶车辆10、便携终端30(用户终端)、管理装置50、合作设施终端80、以及监视摄像机90。
34.自动驾驶车辆10、便携终端30(用户终端)、管理装置50、合作设施终端80、以及监视摄像机90经由互联网200(参照图4)等通信手段从而能够相互通信。自动驾驶车辆10能够通过自动驾驶行驶而进行移动,此外,便携终端30被自动驾驶车辆的移动服务的使用者(用户)所携带。由此,作为移动体的自动驾驶车辆10以及便携终端30通过无线通信从而能够与管理装置50以及合作设施终端80进行通信。
35.<自动驾驶车辆>
36.在图2中,例示了自动驾驶车辆10的外观。例如,自动驾驶车辆10也被称为个人交通工具或者超小型交通工具,且为定员一人或者两人的小型车辆。
37.自动驾驶车辆10例如为,在汽车共享服务中被使用的车辆。在这些服务中,多名用户作为会员而被登记,并且在该用户之间共同使用自动驾驶车辆10。而且,基于自动驾驶车辆10的使用时间等,从而向各个用户要求使用费。
38.如后文所述那样,每次在汽车共享服务的使用时,自动驾驶车辆10能够以自动驾驶的方式来到用户的身边予以迎接。除此以外,在将用户送到目的地之后,自动驾驶车辆10能够以自动驾驶的方式返回至规定的等待场所。由此,这样的汽车共享服务也能够理解为无人出租车服务。
39.自动驾驶车辆10能够进行例如美国的汽车工程师学会(sae:society of automotive engineers)所规定的自动驾驶等级之中的、等级四或者等级五中的自动驾驶。此外,也可以在车内设置转向盘等的转向设备,以便能够进行由乘车中的用户所实施的手动驾驶。
40.参照图1至图3,自动驾驶车辆10为,将旋转电机17(电机)作为驱动源并将未图示的蓄电池作为电源的电动汽车(battery electric vehicle、bev)。如上述那样,由于自动驾驶车辆10为定员一人或者两人的小型车辆,因而由于该车辆尺寸的原因从而使蓄电池空
间受到限制,因此,续航距离也受到限制。因此,例如自动驾驶车辆10主要作为在市区街道内的短距离移动手段而被使用。
41.在自动驾驶车辆10中,作为行驶控制机构而具备对车轮16进行转向的转向机构15以及使车轮16制动的制动机构14。此外,自动驾驶车辆10具备对旋转电机17的输出进行控制的逆变器18。
42.进一步地,自动驾驶车辆10搭载有用于实现自动驾驶行驶(也被称为自主行驶)的机构。具体而言,作为用于实现自动驾驶行驶的机构,自动驾驶车辆10具备摄像机11a、激光雷达单元11b、接近传感器12、定位部13、以及控制部20。
43.参照图2,在自动驾驶车辆10中,在其前表面、后表面、以及两个侧面上设置有传感器单元11。传感器单元11被构成为,包括摄像机11a(参照图1)以及激光雷达单元11b。
44.激光雷达单元11b为,自动驾驶行驶用的传感器单元,并且使用有激光雷达(lidar、light detection and ranging:光检测和测距)、也就是利用激光来对与周边物体之间的距离进行测定的技术。激光雷达单元11b被构成为,包括朝向车外照射红外线的激光的发射器、接收其反射光的接收器、以及使发射器及接收器旋转的电机。
45.例如,发射器朝向车外照射红外线的激光。当从发射器照射的激光碰到自动驾驶车辆10的周边的物体时,其反射光将被接收器所接收。基于从发射器的照射到接收器的接收为止所花费的时间,从而可求出反射点与接收器之间的距离。此外,通过利用电机而使发射器以及接收器转动,从而在水平方向以及铅直方向上扫描激光光线,由此,能够获得与自动驾驶车辆10的周边环境有关的三维点组数据。
46.返回图1,摄像机11a对与激光雷达单元11b同样的视野进行拍摄。摄像机11a具备例如cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)传感器或ccd(charge coupled device:电荷耦合器件)传感器等图像传感器。接近传感器12例如为红外线传感器,并且如图2所例示的那样,被设置在车辆的前表面、后表面以及两个侧面上。例如,在自动驾驶车辆10到达乘车地时,接近传感器12会对人行道的路缘石等突出物进行检测。通过该检测,从而能够进行使自动驾驶车辆10接近路缘石并使之停车的精准停靠控制。
47.定位部13为通过人造卫星从而实施定位的系统,例如使用了gnss(global navigation satellite system:全球导航卫星系统)。通过使用定位部13,从而能够进行本车位置(纬度以及经度)的推断。
48.控制部20也可以为例如自动驾驶车辆10的电子控制单元(ecu),并且由计算机(电子计算机)构成。在控制部20中,作为其硬件结构而具备对数据的输入输出进行控制的输入输出控制器21。此外,在控制部20中,作为运算装置而具备cpu22、gpu23(graphics processing unit:图形处理器)、以及dla24(deep learning accelerators:深度学习加速器)。此外,在控制部20中,作为存储部而具备rom(read-only memory:只读存储器)25、ram(random access memory:随机存取存储器)26、以及硬盘驱动器27(hdd:hard disk drive)。另外,也可以代替硬盘驱动器27,从而使用ssd(solid state drive:固态硬盘)等存储装置。这些结构部件与内部总线28相连接。
49.在作为存储装置的rom25以及硬盘驱动器27的至少一方中,存储有用于实施自动驾驶车辆10的自动驾驶控制的程序。通过由控制部20的cpu22等来执行上述程序,从而在控
制部20中形成图3所例示的那样的功能模块。另外,通过由cpu22来执行被存储于dvd等的非暂时性的计算机可读存储介质中的上述程序,从而也会在控制部20中形成图3所示的那样的功能模块。即,在控制部20中,作为功能模块而具备扫描数据解析部40、自我位置推断部41、自主行驶控制部42、收发部43、导向地图存储部44、以及时钟45。
50.扫描数据解析部40取得摄像机11a所拍摄到的拍摄图像。扫描数据解析部40针对所取得的拍摄图像从而实施利用了使用有教师学习的ssd(single shot multibox detector)或yolo(you only look once)这样的已知的深度学习方法的图像识别。通过该图像识别,从而实施拍摄图像内的物体检测和其属性(车辆、路人、结构物等)识别。
51.此外,扫描数据解析部40从激光雷达单元11b中取得三维点组数据。进一步地,扫描数据解析部40执行将三维点组划分为多个组的分组。进一步地,扫描数据解析部40创建将图像识别完毕的拍摄图像和分组完毕的三维点组数据的坐标重叠而成的周边数据。通过周边数据,从而能够检测出是什么样属性的物体与自动驾驶车辆10相隔多远。该周边数据被发送给自我位置推断部41以及自主行驶控制部42。
52.自我位置推断部41从定位部13中取得自我位置信息(纬度、经度)。例如,自我位置推断部41从人造卫星中取得自我位置信息。已知的是,从人造卫星中取得的自我位置信息最大程度包括100m左右的误差。因此,自我位置推断部41也可以对从定位部13中取得的自我位置信息进行修正。例如,自我位置推断部41取得被存储在导向地图存储部44中的、自我位置周边的动态地图(在后文中进行叙述)数据。进一步地,自我位置推断部41实施基于动态地图的三维图像与由扫描数据解析部40取得的周边图像的匹配。通过该匹配,从而可获得动态地图上的坐标点、也就是自我位置。以此方式得到的自我位置信息(本车位置信息)被发送给自主行驶控制部42。
53.在收发部43中,从管理装置50被发送有导向地图数据。如后文所述那样,该导向地图数据包括动态地图数据以及行驶路径信息。收发部43所接收到的导向地图数据被存储至导向地图存储部44中。
54.自主行驶控制部42基于被存储在导向地图存储部44中的导向地图数据、从自我位置推断部41发送的自我位置信息(本车位置信息)、以及从扫描数据解析部40发送的周边数据,从而实施自动驾驶车辆10的行驶控制。
55.例如,沿着自我位置以及导向地图数据中包含的行驶路径从而决定全局性的行进路线。进一步地,基于周边数据,从而规定躲避前方的障碍物等的、局部性的行进路线。自主行驶控制部42根据这些行进路线,从而对制动机构14、转向机构15、以及逆变器18进行控制。
56.<便携终端>
57.参照图1,便携终端30为,具备管理装置50的、使用了自动驾驶车辆10的移动服务的使用者(用户)所持有的通信终端设备。便携终端30例如也可以为智能手机。在图1中,例示了便携终端30的硬件结构。便携终端30具备输入输出控制器31、cpu32、输入部33、显示部34、以及定位部38。此外,在便携终端30中,作为存储部而具备rom35、ram36、以及储存设备37。这些结构部件与内部总线39相连接。
58.输入部33以及显示部34也可以作为触摸面板而被一体形成。如后文所述那样,输入部33在每次自动驾驶车辆10的车辆调配预约时,能够输入目的地、乘车地、使用日、以及
乘车预定时刻。
59.定位部38能够取得自身的当前位置即终端位置。例如,与自动驾驶车辆10的定位部13同样地,定位部38为通过人造卫星来实施定位的系统,并且例如使用gnss(global navigation satellite system:全球导航卫星系统)。
60.在作为存储装置的rom35以及储存设备37的至少一方中,存储有用于对自动驾驶车辆10的车辆调配预约服务进行使用的程序。通过该程序被便携终端30的cpu32等执行,从而在便携终端30中形成了图4所示那样的功能模块。此外,通过cpu32执行被存储于dvd等非暂时性的计算机可读存储介质中的上述程序,从而也能够形成图4所示那样的功能模块。即,在便携终端30中,作为功能模块而具备收发部70以及车辆调配预约应用71。
61.如后文所述那样,车辆调配预约应用71对显示部34的显示图像进行控制,并且实施从输入部33被输入的信息的处理。车辆调配预约应用71使(作为触摸面板的)显示部34显示图6至13等中所例示的车辆调配预约画面。作为便携终端30的持有者的用户对兼任输入部33的该车辆调配预约画面的任意区域进行触摸操作等,从而实施自动驾驶车辆10的车辆调配预约。车辆调配预约的过程将在后文进行叙述。
62.<合作设施终端>
63.参照图1,合作设施终端80被设置于在乘车预约时刻前的等待时间段中向自动驾驶车辆10提供等待场所的合作设施的运营公司中。例如,该公司也可以为实施分别附设有停车场的多个商业设施的运营以及管理的运营公司。
64.作为商业设施的示例,可列举出便利商店。此外,作为运营公司,可列举出将便利商店设为加盟店(特许加盟)的本部公司(特许经营)。也就是说,在该示例中,作为自动驾驶车辆10的乘车预定时刻前的等待场所,而被分配有被附设给便利商店的停车场。此外,作为其它示例,也可以将附设有停车场的所谓的连锁店作为商业设施,并且将对这些连锁店进行运营与管理的本部公司作为运营公司。
65.如在后文叙述那样,代替将商业设施的停车场的一部分作为自动驾驶车辆10的等待场所而进行出租的方式,而从合作设施终端80向管理装置50提供表示商业设施所经营的商品的折扣服务等优待服务信息。该优待服务信息被发送到用户的便携终端30中。通过提供优待服务,从而促进了车辆调配预约了在商业设施的停车场中进行等待的自动驾驶车辆10的用户的、乘车前的在该商业设施内的商品购买。
66.如此,通过优待服务的提供,从而能够将自动驾驶车辆10的用户纳入作为商业设施的消费者。因此,作为商业设施一方,能够产生将所附设的停车场的一部分作为自动驾驶车辆10的等待场所、换言之作为车辆调配中心而进行提供的、积极的动机。
67.此外,除了优待服务以外,商业设施所经营的商品的广告信息可从合作设施终端80经由管理装置50而被发送到用户的便携终端30中。在将商业设施的停车场作为自动驾驶车辆10的等待场所而进行出租时,根据等待时间来计算停车费用。然后,从设置了管理装置50的公司(汽车共享服务的提供公司)向设置了合作设施终端80的公司(商业设施的本部公司)支付停车费用。此时,通过向用户提供广告信息,从而可对停车费用进行打折。
68.合作设施终端80例如由计算机(电子计算机)构成。参照图1,在合作设施终端80中,作为其硬件结构而具备输入输出控制器81、cpu82、输入部83、显示部84。此外,在合作设施终端80中,作为存储部而具备rom85、ram86、以及硬盘驱动器87(hdd)。这些结构部件与内
部总线88相连接。
69.例如,对合作设施终端80进行操作的操作人员例如商业设施的本部公司的职员,将商品广告数据或优待服务数据输入到输入部83中。被输入的商品广告数据或优待服务数据经由管理装置50而被发送到用户的便携终端30中。
70.<管理装置>
71.自动驾驶车辆的管理装置50被设置在例如提供使用自动驾驶车辆10的汽车共享服务的公司中。
72.管理装置50例如由计算机(电子计算机)构成。参照图1,在管理装置50中,作为其硬件结构而具备输入输出控制器51、cpu52、输入部53、显示部54。此外,在管理装置50中,作为存储部而具备rom55、ram56、以及硬盘驱动器57(hdd)。这些结构部件与内部总线58相连接。
73.在作为存储装置的rom55以及硬盘驱动器57的至少一方中,存储有使用自动驾驶车辆10的汽车共享服务的运营程序。通过该程序被管理装置50的cpu52等执行,从而在管理装置50中形成图4所示那样的功能模块。此外,通过cpu52执行被存储于dvd等非暂时性的计算机可读存储介质中的上述程序,也能够形成图4所示那样的功能模块。
74.即,在管理装置50中,作为功能模块而具备服务给予部60、拥塞率计算部61、收发部62、导向地图创建部63、时钟64、使用费用计算部65、停车费用计算部66、车辆调配预约设定部67、等待场所设定部68。此外,在管理装置50中,作为存储部而具备合作设施信息存储部69a、用户信息存储部69b、地图信息存储部69c、以及车辆调配日程存储部69d。
75.在合作设施信息存储部69a中,存储有提供停车场来作为自动驾驶车辆10的等待场所的多个商业设施的信息。该信息包括商业设施名称、地址、可停车台数、累计停车时间等。
76.在用户信息存储部69b中,存储有使用了自动驾驶车辆10的汽车共享服务的使用者(用户)的信息。该信息存储有用户名、账户名、使用历史、地址、联络方式、驾驶证号、信用卡号、以及用于登录车辆调配预约应用71的密码等。另外,账户名为,在使用车辆调配预约应用71时,用于对用户进行特别指定的名称(会员名)。例如,作为账户名而使用用户的邮箱地址。
77.在地图信息存储部69c中,存储有作为地图数据的动态地图数据。动态地图为三维地图,并且存储有例如车行道的位置以及形状(三维形状)。所谓车行道的三维形状例如包括坡度或宽度等。此外,被画在车行道上的车道、人行横道、停车线等的位置也被存储在动态地图中。除此之外,道路周边的建筑物或信号器等结构物的位置以及形状(三维形状)也被存储在动态地图中。进一步地,停车场的位置以及形状也被存储在动态地图中。
78.例如,在动态地图中,使用到包括纬度以及经度在内的地理坐标系。在自动驾驶车辆10进行自动驾驶行驶的时候,导向地图创建部63从地图信息存储部69c中提取动态地图数据。进一步地,导向地图创建部63创建出包含自动驾驶车辆10的行驶路径的导向地图数据,并发送给自动驾驶车辆10。行驶路径为,途经等待场所、乘车地、以及目的地的路径。
79.此外,被存储于地图信息存储部69c中的动态地图数据通过导向地图创建部63而被加工。如后文所述那样,在车辆调配预约应用71被启动时,作为便携终端30的周边的俯视地图图像的地图图像100(参照图6)通过导向地图创建部63而被创建出来。
80.在车辆调配日程存储部69d中,存储有处于管理装置50的管理下的多台自动驾驶车辆10的车辆调配预约日程信息。车辆调配预约日程包括被设定了车辆调配预约的自动驾驶车辆的识别编号(id)、进行了车辆调配预约的用户的账户、使用日期、乘车预定时刻、乘车地、以及目的地。
81.服务给予部60对从合作设施终端80发送的优待服务信息以及广告信息进行接收。进一步地,服务给予部60针对在车辆调配预约时将商业设施的停车场设定作为乘车地的用户而发送优待服务信息以及广告信息。
82.拥塞率计算部61对分别被设置在合作对象的多个商业设施中的停车场的拥塞率进行测定。拥塞率计算部61以从被安装在停车场中的监视摄像机90接收到的拍摄图像为基础来计算停车场的拥塞率。例如,拥塞率计算部61具备利用将车辆图像作为输入值且将“车辆”作为其输出值(正解值)的教师数据从而完成学习的神经网络。
83.使用费用计算部65按照用户来计算自动驾驶车辆10的使用时间。例如,使用费用计算部65对以月为单位的自动驾驶车辆10的总计使用时间进行计算,从而对与此相应的使用费用进行计算。向用户要求所计算出的使用费用。
84.停车费用计算部66对基于自动驾驶车辆10将附设于商业设施中的停车场作为等待场所而加以使用的时间(等待时间)的停车费用进行计算。例如,计算出处于管理装置50的管理下的所有自动驾驶车辆10的以月为单位的总计等待时间,并基于此从而计算出停车费用。另外,如上述那样,在从合作设施终端80发送的广告信息被发送至便携终端30时,将根据该广告信息的提供次数从而对停车费用进行打折。
85.车辆调配预约设定部67根据来自用户的要求,从而实施自动驾驶车辆10的车辆调配预约。关于这一点,将在后文中进行叙述。
86.等待场所设定部68针对被进行了车辆调配预约的自动驾驶车辆10,从而对乘车预定时刻前的等待时间段内的等待场所进行设定。关于这一点,将在后文中进行叙述。此外,等待场所设定部68对如下场所进行设定,即,对使未被实施车辆调配预定的所谓的空车状态的自动驾驶车辆10在乘车地的指定频率较高的地域内进行等待的、预估车辆调配时的等待场所进行设定。
87.<监视摄像机>
88.在图5中,例示了后文叙述的临近停车场118a(参照图11,最接近乘车地的停车场)以及与该临近停车场同时设置的商业设施120(参照图5)的俯视图。监视摄像机90对停车场118a进行监视。监视摄像机90可以如图5的监视摄像机90a、90b那样在一个停车场118a内被设置多台,以便能够对停车场118a的整个区域进行拍摄。
89.参照图1,监视摄像机90例如具备cmos传感器或ccd传感器等图像传感器。监视摄像机90例如以5分钟间隔或者10分钟间隔等间歇性地对停车场118a进行拍摄。由监视摄像机90拍摄得到的拍摄图像被发送给管理装置50。
90.<车辆调配预约>
91.参照图4,当用户使被安装在便携终端30中的车辆调配预约应用71启动时,在显示部34上会显示出对账户与密码进行输入的输入框(未图示)。被输入的账户与密码的信息经由收发部62、70从而被发送给车辆调配预约设定部67。
92.车辆调配预约设定部67将接收到的账户与密码的信息与被存储在用户信息存储
部69b中的各自的信息进行核对。当核对正常实施时,车辆调配预约设定部67从便携终端30的定位部38中取得当前位置(终端位置)。进一步地,导向地图创建部63从地图信息存储部69c中取得终端位置周边的俯视地图数据并发送给便携终端30。
93.在便携终端30的显示部34中,显示有图6中所例示的、车辆调配预约图像。在该图像中,在终端位置周边的地图图像100上重叠显示有消息框110a。在消息框110a中,显示有询问可否进行自动驾驶车辆10的车辆调配预约的操作按钮112a、112b(“是”、“否”)。
94.当通过由用户进行的触摸操作等从而选择了操作按钮112a时,如图7所示那样,将在显示部34中显示促使进行目的地设定的消息框110b。当在该状态下用户通过触摸操作等而指定了地图图像100上的任意的点时,如图8中所示那样,将在指定点处标记目的地标记114并且显示出目的地设定确认的消息框110c。
95.在目的地设定后,如图9所例示的那样,在显示部34中显示促使进行乘车地的设置的消息框110d。当在该状态下用户通过触摸操作等而指定了地图图像100上的任意的点时,如图10所例示的那样,将在指定点处显示乘车地标记116。
96.在此,车辆调配预约设定部67对乘车地标记116是否被设定在提供自动驾驶车辆10的等待场所的商业设施的停车场118a~118c中的任意一个中进行判断。在由用户所指定的乘车地为不同于商业设施的停车场118a~118c中的任意一个的地点的情况下,车辆调配预约设定部67针对用户而发送将与被指定的乘车地标记116临近的停车场118a变更设定为乘车地的建议消息。接收该消息,并在便携终端30的显示部34上,显示出建议消息以及表示询问可否这样进行的操作按钮112c、112d(“是”、“否”)的消息框110e。
97.在建议消息中包含有如下主旨的消息,即,如果将乘车地变更为作为建议停车场的停车场118a,则会给予能够在与停车场118a同时设置的商业设施120(参照图5)中使用的优待服务的信息。优待服务成为诱因,从而促使乘车地变更。
98.当用户通过触摸操作等从而选择了操作按钮112c时,如图11那样,将在作为建议停车场的停车场118a处设定乘车地标记116,并且在显示部34上显示出表示其确认消息的消息框110f。此外,管理装置50的服务给予部60向便携终端30发送能够在与停车场118a同时设置的商业设施120中使用的优待服务信息以及与该商业设施相关的广告信息。
99.另一方面,当在图10中选择了操作按钮112d(“否”)时,则将在最初所指定的乘车地标记116处设定乘车地。在该情况下,将不发送优待服务信息,而是仅向便携终端30发送广告信息。或者,也可以向便携终端30发送与在变更了乘车地的情况下所给予的优待服务相比而服务内容为轻度的优待服务信息。
100.当设定了目的地和乘车地时,导向地图创建部63将从乘车地起到目的地为止创建行驶路径。进一步地,导向地图创建部63基于行驶路径上的拥堵预测或自动驾驶车辆10的额定车速等来计算行驶预定时间。
101.接下来,参照图12,在显示部34上显示用于对乘车预定进行输入的消息框110g。在该消息框110g中,能够输入使用日以及乘车预定时刻。此外,考虑到希望尽早使用自动驾驶车辆10的情况,从而在消息框110g中显示有将当前时刻设为乘车预定时刻的这样的操作按钮112e。
102.当由用户输入了乘车预定时,车辆调配预约设定部67将参照被存储在车辆调配日程存储部69d中的车辆调配日程,从而对是否存在能够实施车辆调配的自动驾驶车辆10进
行判断。例如,车辆调配预约设定部67将上述的乘车预定时刻作为起点,从而对直到上述的行驶预定时间后为止的行驶时间段进行计算。进一步地,车辆调配预约设定部67在该行驶时间段前后的时间段中,例如跨及行驶时间段及其前后一小时的期间中,对没有被设定车辆调配预约的空车状态的自动驾驶车辆10进行搜索。
103.当搜索到空车状态的自动驾驶车辆10时,将在显示部34上显示出如图13所例示的那样的表示车辆调配预约的确认消息的消息框110h。在确认消息中,包含使用日、乘车预定时刻、车辆信息、乘车地以及目的地。
104.<等待场所设定流程>
105.被设定了车辆调配预约的自动驾驶车辆10在规定的停车场中进行等待,直到接近乘车预定时刻。例如在远离乘车地的郊外的大型停车场中,有多台自动驾驶车辆10进行停车、等待。然后,当到了乘车预定时刻前的等待时间段时,自动驾驶车辆10将向临近乘车地的临近停车场即商业设施的停车场移动并进行等待。例如,在图11的示例中,临近停车场成为停车场118a。每当在该临近停车场118a中进行等待时,便预先计算临近停车场118a的拥塞率。在拥塞率足够低的情况下,临近停车场118a被设定为等待用的停车场。
106.参照图4、图5、图14,等待场所设定部68参照所有被存储在车辆调配日程存储部69d中的车辆调配预约日程,从而对直至乘车预定时刻前的等待时间段为止的车辆调配预约日程的有无进行确认。等待时间段例如也可以为乘车预定时刻前的前一小时的时间段。
107.等待场所设定部68参照时钟64,从而提取出直到等待时间段为止的车辆调配预约日程,并取得被包含在其预约信息中的乘车地信息(图14的s10)。接下来,等待场所设定部68对被附设于作为最接近所取得的乘车地的合作商店的商业设施的停车场(临近停车场118a)进行搜索(s12)。
108.例如,等待场所设定部68从合作设施信息存储部69a中取得合作设施的地址信息。进一步地,等待场所设定部68从地图信息存储部69c中取得地图信息,从而求出乘车地与各个合作设施的位置关系。接着,等待场所设定部68对被设置于最接近乘车地的位置的合作设施的停车场(临近停车场118a)进行选择。另外,在作为乘车地而设定了停车场118a时,可在未求出上述那样的位置关系的条件下直接将该停车场选择作为临近停车场。
109.接下来,拥塞率计算部61从监视摄像机90(90a、90b)中取得被选择的临近停车场118a的拍摄图像。进一步地,拥塞率计算部61根据所取得的拍摄图像来对临近停车场118a的拥塞率进行计算。例如,像上述那样,使用利用将车辆图像作为输入数据且将“车辆”作为输出值(正解值)的教师数据而完成学习的神经网络,从而实施拍摄图像的图像识别。其结果为,可求出正停在临近停车场118a中的车辆的台数。
110.在合作设施信息存储部69a中,存储有各个合作设施的停车场118a~118c的可停车台数。通过将利用图像识别而求出的车辆台数除以可停车台数,从而求出拥塞率(%)。例如,在图5的示例中,由于正停车的车辆台数为1台(停车在停车空间124e中)、可停车台数为9台(停车空间124a~124d、124f~124i为空位),因此拥塞率成为0.11(11%)。
111.等待场所设定部68对所计算出的拥塞率是否小于规定的拥塞阈值进行判断(s14)。例如,作为拥塞阈值而设定50%。在拥塞率小于拥塞阈值时,等待场所设定部68将临近停车场118a设定为自动驾驶车辆10的等待时间段内的等待场所(短时间停车场所)。进一步地,等待场所设定部68针对被实施了车辆调配预约的自动驾驶车辆10而发送向合作设施
的停车场118a移动的移动指令(s16)。
112.另外,此时,从导向地图创建部63向自动驾驶车辆10发送有表示将自动驾驶车辆10的当前地点、等待场所、乘车地以及目的地连结而成的行驶路径的地图信息(动态地图数据)。自动驾驶车辆10接收地图信息,并且朝向作为等待场所的临近停车场118a而进行自动行驶。通过在乘车预定时刻前使自动驾驶车辆10在乘车地或者乘车地附近进行等待,从而能够抑制自动驾驶车辆10相对于乘车预定时刻的延迟到达。
113.此外,如上述那样,通过将乘车地设定在临近停车场118a中,从而可使用户在与临近停车场118a同时设置的商业设施120(参照图5)中接受优待服务。用户可在乘车预定时刻前的空闲时间中顺便去商业设施120从而实施使用了优待服务的商品购买等,进而实现了商业设施120的销售提升。
114.另一方面,在步骤s14中,在停车场118a的拥塞率为拥塞阈值以上的情况下,则有可能是对于与停车场118a同时设置的合作商店即商业设施120的使用者而言便利性降低。因此,在这样的情况下,等待场所设定部68将使被设定了车辆调配预约的自动驾驶车辆10在当前的停车场中继续进行等待。
115.在停车场118a的拥塞率为拥塞阈值以上的情况下,典型而言,在拥塞率为100%的情况下,自动驾驶车辆10将无法在停车场118a中进行停车等待。在这样的情况下,在乘车地被设定在停车场118a中的情况下,停车场118a将作为所谓的门廊而被利用。
116.即,自动驾驶车辆10在停车场118a的通道空间126中让用户上车,之后,快速地从停车场118a退出。例如,自动驾驶车辆10的、在停车场118a的停留时间被抑制在10分钟以内。通过缩短停车场118a内的停留时间,从而即使在停车场118a处于拥塞的时候,也能够抑制自动驾驶车辆10给商业设施120的使用者带来的影响。
117.此外,如图2所例示的那样,本实施方式所涉及的自动驾驶车辆10为,被称为所谓的个人交通工具的小型车辆。因此,例如与通常的乘坐5人的乘用车相比,自动驾驶车辆10的车宽较小,而且车辆长度也较短。例如,自动驾驶车辆的最小旋转半径为通常的乘坐5人的乘用车的同半径的1/2左右。因此,自动驾驶车辆10例如能够进行停车场118a的通道空间126内的调转(u形转向)等,从而能够在不进入停车空间124a~124i中的条件下进行调转等方向转换。如此,由于自动驾驶车辆10为小型车辆,因此即使在停车场118a处于拥塞的时候,也能够抑制自动驾驶车辆10给商业设施120的使用者带来的影响。
118.<预估车辆调配>
119.虽然在上述的实施方式中,使被设定了车辆调配预约的自动驾驶车辆10在临近乘车地的停车场118a中进行等待,但是本实施方式所涉及的自动驾驶车辆的管理系统并未被限定于该方式。也可以像以下所说明的那样,使没有被车辆调配预约的自动驾驶车辆10预先在被指定作为乘车地的频率较高的地域内进行等待,从而实施预估车辆调配。
120.参照图4,在车辆调配日程存储部69d中,存储有过去的车辆调配预约信息。在该信息内,在乘车地历史中存储有被设定为乘车地的地点和乘车预定时刻。
121.如果以这些信息为基础,则如图15所例示的那样,能够按照时间段且按照地域从而求出被指定为乘车地的频率。例如,拥塞率计算部61基于在过去的车辆调配预约信息中所包含的乘车地历史,从而创建像图15这样的按照地域以及按照时间段的乘车地指定频率柱状图115。例如,按照时间段的乘车地指定频率,按每个时间段而使用最近一周的平均值。
122.此外,作为柱状图的创建单位的地域,被规定为包含至少一个作为合作商店的商业设施120的这样的区域113。例如,被存储在地图信息存储部69c中的地图被划分成作为该柱状图的创建单位的多个区域113。此外,柱状图的时间段例如以一小时为单位而被设定。通过创建这样的柱状图,从而能够特别指定具有相对地被设定为乘车地的频率较高的高频率时间段的高频率地域。
123.在图16中,例示了预估车辆调配流程。拥塞率计算部61参照时钟64,从而例如针对每一小时而执行该预估车辆调配流程。拥塞率计算部61将作为柱状图的创建单位的地图上的区域113的计数即区域计数k设定为初始值1(s20)。
124.接下来,拥塞率计算部61参照区域计数k=1时的柱状图115,从而求出从当前时刻起到一小时后的时间段内的乘车地指定频率n,并且对该频率n是否超过规定的频率阈值n_th进行判断(s22)。如果乘车地指定频率n为频率阈值n_th以下,则对区域计数k是否为最终值k_end进行判断(s30)。在区域计数k为最终值k_end的情况下,预估车辆调配流程结束。另一方面,在区域计数k没有到达最终值k_end的情况下,区域计数k被递增(s32),并且处理被返回至步骤s22。
125.在步骤s22中,在乘车地指定频率n超过频率阈值n_th的情况下,区域k成为具有乘车地的指定频率n较高的高频率时间段的高频率地域。等待场所设定部68对上述高频率时间段前的等待时间段、例如距高频率时间段一小时前的时间段内的、区域k内的合作商店的停车场(在图15的示例中为停车场118a)进行搜索(s24)。
126.接下来,拥塞率计算部61从监视摄像机90(90a、90b)中取得被搜索到的停车场118a的拍摄图像。进一步地,拥塞率计算部61根据所取得的拍摄图像并使用上述那样的图像识别,从而对停车场118a的拥塞率进行计算。
127.等待场所设定部68对被计算出的拥塞率是否小于规定的拥塞阈值进行判断(s26)。例如,作为拥塞阈值而设定50%。在拥塞率小于拥塞阈值的时候,等待场所设定部68对将被搜索到的停车场118a作为等待场所而进行等待的自动驾驶车辆10进行搜索。
128.例如,等待场所设定部68参照被存储在车辆调配日程存储部69d中的车辆调配日程,从而对从当前时刻起至规定的时间为止的没有被设定车辆调配预定的空车状态的自动驾驶车辆10进行搜索。例如,对从当前时刻起至两小时后为止没有被设定车辆调配预约的自动驾驶车辆10进行搜索。
129.进一步地,等待场所设定部68针对被搜索到的自动驾驶车辆10而发送朝向作为等待场所而被设定的合作设施的停车场118a移动的移动指令(s28)。此外,以与移动指令合在一起的方式,从导向地图创建部63向自动驾驶车辆10发送像上述那样表示停车场118a被设定为等待场所的行驶路径的地图信息(动态地图数据)。
130.以此方式,通过预先使空车状态的自动驾驶车辆10在被指定为乘车地的希望较高的地域以及时间段内进行等待,从而即使对于紧急的车辆调配预约而言,也能够讯速地进行对应。例如,即使像图12的操作按钮112e那样被设定了要求尽早使用的车辆调配预约时,也能够抑制自动驾驶车辆10相对于乘车预定时刻的延迟到达。
131.本公开并不限于上述实施例,也包括在不脱离权利要求书所限定的本公开的技术范围或实质的情况下的所有改变和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。