1.本技术涉及飞机牵引设备技术领域,尤其涉及一种飞机牵引车及飞机牵引系统。
背景技术:
2.现有技术中,在牵引车牵引飞机行驶过程中,需依靠驾驶员的视觉直接观察飞机周边的情况来调整牵引车的路线,进而调整飞机的行驶路线,以避免飞机发生剐蹭,然而,由于驾驶员的注意力不能时刻保持集中,容易对飞机周边情况出现误判,导致飞机两侧机翼发生剐蹭的情况发生。
技术实现要素:
3.有鉴于此,本技术实施例提供一种飞机牵引车及飞机牵引车系统,便于避免飞机两侧机翼发生剐蹭。
4.本技术实施例提供一种飞机牵引车,包括:牵引车本体和探测雷达;所述探测雷达设于所述牵引车本体上,用于在所述牵引车本体牵引飞机直行和/或转弯时,所述探测雷达的视场范围覆盖飞机两侧机翼及所述飞机两侧机翼前方预定区域。
5.根据本技术实施例的一种具体实现方式,所述探测雷达包括第一探测雷达;所述牵引车本体上设有用于与所述飞机可拆卸连接的牵引机构;所述第一探测雷达设于所述牵引机构上;或者,所述第一探测雷达设于所述牵引车本体的后轮的后方。
6.根据本技术实施例的一种具体实现方式,所述第一探测雷达在所述牵引车本体上的设置位置,低于所述飞机机身底部。
7.根据本技术实施例的一种具体实现方式,所述第一探测雷达的数量为两个;其中,一个第一探测雷达设于所述牵引车本体的左侧后轮的后方,另一个第一探测雷达设于所述牵引车本体的右侧后轮的后方。
8.根据本技术实施例的一种具体实现方式,两个第一探测雷达的视场范围部分重叠。
9.根据本技术实施例的一种具体实现方式,所述探测雷达还包括:第二探测雷达和第三探测雷达,所述第二探测雷达和第三探测雷达分别设于所述牵引车本体的两侧,用于在所述牵引车牵引所述飞机直行时,探测所述飞机两侧机翼及所述飞机两侧机翼前方预定距离是否有障碍。
10.根据本技术实施例的一种具体实现方式,所述第二探测雷达和第三探测雷达分别设于所述牵引车本体的车顶两侧。
11.根据本技术实施例的一种具体实现方式,所述飞机牵引车还包括:第四探测雷达,所述第四探测雷达设于所述牵引车本体的前端,用于探测所述飞机前方预定范围。
12.根据本技术实施例的一种具体实现方式,所述探测雷达为3d激光雷达。
13.本技术实施例还提供一种飞机牵引系统,包括飞机和上述任一实现方式的飞机牵引车,所述飞机与所述飞机牵引车相连。
14.本实施例提供的飞机牵引车及飞机牵引系统,探测雷达设于牵引车本体上,探测雷达用于在牵引车本体牵引飞机直行和/或转弯时,探测雷达的视场范围覆盖飞机两侧机翼及飞机两侧机翼前方预定区域,由于探测雷达的视场范围覆盖飞机两侧机翼及飞机两侧机翼前方预定区域,这样,驾驶员可借助于探测雷达的探测结果,清楚地了解飞机两侧机翼及两侧机翼前方预定区域是否存在障碍物,如果存在障碍物,驾驶员可调整飞机牵引车的行驶路线,从而避免飞机两侧机翼发生剐蹭。
附图说明
15.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
16.图1为本技术一实施例提供的飞机牵引车的结构示意图。
17.图2为本技术又一实施例提供的飞机牵引车的结构示意图。
18.图3为图2的立体图。
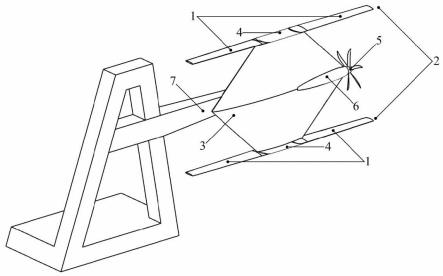
19.图4为本技术一实施例的飞机牵引系统的结构示意图。
具体实施方式
20.下面结合附图对本技术实施例进行详细描述。应当明确,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本技术保护的范围。
21.本技术一实施例提供的一种飞机牵引车,包括:牵引车本体和探测雷达;所述探测雷达设于所述牵引车本体上,用于在所述牵引车本体牵引飞机直行和/或转弯时,所述探测雷达的视场范围覆盖飞机两侧机翼及所述飞机两侧机翼前方预定区域,驾驶员可借助于探测雷达的探测结果,清楚地了解飞机两侧机翼及两侧机翼前方预定区域是否存在障碍物,如果存在障碍物,驾驶员可调整飞机牵引车的行驶路线,从而避免飞机两侧机翼发生剐蹭。
22.图1为本技术一实施例提供的飞机牵引车的结构示意图,如图1所示,本实施例的飞机牵引车01,可以包括:牵引车本体1和探测雷达2;探测雷达2设于牵引车本体1上,用于在牵引车本体1牵引飞机直行和/或转弯时,探测雷达2的视场范围覆盖飞机两侧机翼及飞机两侧机翼前方预定区域。
23.牵引车本体1能够牵引飞机移动。
24.探测雷达2可以利用电磁波探测目标的电子设备,探测雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。探测雷达2的基本结构,可以包括:发射机、发射天线、接收机、接收天线,处理部分以及显示器,还有电源设备、数据录取设备、抗干扰设备等辅助设备。为了提高探测精度,在本技术一个例子中,探测雷达2可为3d激光雷达,3d激光雷达为用激光器作为辐射源的雷达,3d激光雷达的视场范围可为90
°
(水平)*30
°
(垂直),探测范围可为300m。在另一个例子中,3d激光雷达的视场范围也可为120
°
(水平)*30
°
(垂直),探测范围可为150m。本实施例的3d激光雷达的视场范围及探测范围不限于以上数值。
25.在牵引车本体1牵引飞机直行和/或转弯时,本实施例的探测雷达2的视场范围只要能覆盖飞机两侧机翼及飞机两侧机翼前方预定区域,探测雷达2可安装于牵引车本体1的任一位置。
26.本实施例的飞机牵引车,探测雷达设于牵引车本体上,用于在牵引车本体牵引飞机直行和/或转弯时,探测雷达的视场范围覆盖飞机两侧机翼及飞机两侧机翼前方预定区域,由于探测雷达的视场范围覆盖飞机两侧机翼及飞机两侧机翼前方预定区域,这样,驾驶员可借助于探测雷达的探测结果,清楚地了解飞机两侧机翼及两侧机翼前方预定区域是否存在障碍物,如果存在障碍物,驾驶员可调整飞机牵引车的行驶路线,从而避免飞机两侧机翼发生剐蹭,进一步地,便于降低飞机维修费用。
27.参见图1和图2,在本技术一个例子中,探测雷达2包括第一探测雷达20;牵引车本体1上设有用于与飞机可拆卸连接的牵引机构10;第一探测雷达20设于牵引机构上。
28.参见图3,在本技术另一个例子中,第一探测雷达20设于牵引车本体1的后轮12的后方。
29.牵引车本体1可包括前轮和后轮,其中后轮为远离牵引车驾驶室或牵引车车头的车轮,后轮12的后方为远离牵引车驾驶室的方向。
30.第一探测雷达设于牵引车本体的后轮的后方,这样,可使第一探测雷达更加靠近飞机两侧机翼,在此基础上,在保证探测雷达的视场范围覆盖飞机两侧机翼及所述飞机两侧机翼前方预定区域的同时,可以降低对第一探测雷达本身具备的探测参数的要求,而探测参数的降低,能够降低第一探测雷达的价格,从而降低本实施例飞机牵引车的成本。
31.参见图1及图3,牵引车本体1的后轮12可以包括两个后轮12a和12b,后轮12a处于牵引车本体的后端左侧,也可称为左侧后轮;后轮12b处于牵引车本体的后端右侧,也可称为右侧后轮。
32.作为一可选实施方式,第一探测雷达20的数量可为两个20a和20b;其中,第一探测雷达20a设于牵引车本体1的左侧后轮12a的后方,第一探测雷达20b设于牵引车本体1的右侧后轮12b的后方。
33.其中第一探测雷达20a形成的视场范围为2a,第一探测雷达20b形成的视场范围为2b。
34.在飞机牵引车牵引飞机直行时,可使用设于牵引车本体1的左侧后轮12a的后方的第一探测雷达20a探测飞机的左侧机翼及左侧机翼前方预定区域,使用设于牵引车本体1的右侧后轮12b的后方的第一探测雷达20b探测飞机的右侧机翼及右侧机翼前方预定区域;在飞机牵引车牵引飞机转弯时,如牵引车向右侧转弯时,左侧机翼由于被机身遮挡,处于驾驶员的视觉盲区,此时可使用左侧后轮12a的后方的第一探测雷达20a探测飞机的左侧机翼及左侧机翼前方预定区域;牵引车向左侧转弯时,可使用右侧后轮12b的后方的第一探测雷达20b探测飞机的右侧机翼及右侧机翼前方预定区域。
35.为了提高探测的准确性,两个第一探测雷达20a和20b的视场范围部分重叠。
36.本实施例的两个第一探测雷达视场可以朝向飞机呈一定角度,具体地两个第一探测雷达20a和20b的视场中心分别与牵引车本体的车身轴线成50
°
至70
°
夹角。在一个例子中,两个第一探测雷达20a和20b的视场中心分别与牵引车本体的车身轴线成60
°
夹角。
37.参见图1,本技术又一实施例,与上述实施例基本相同,不同之处在于,本实施例的
飞机牵引车的探测雷达2,还可以包括:第二探测雷达22和第三探测雷达24,第二探测雷达22和第三探测雷达24分别设于牵引车本体1的两侧,用于在牵引车牵引飞机直行时,探测飞机两侧机翼及飞机两侧机翼前方预定距离是否有障碍。
38.第二探测雷达22和第三探测雷达24各探测飞机的一侧机翼及该机翼前方预定距离是否有障碍,具体地,第二探测雷达22安装在牵引车本体1的左侧,形成的视场范围为2d,可探测飞机左侧机翼及机翼前方预定距离是否有障碍;第三探测雷达24安装在牵引车本体1的右侧,形成的视场范围为2e,可探测飞机右侧机翼及机翼前方预定距离是否有障碍。
39.参见图1和图3,第二探测雷达22和第三探测雷达24可设于牵引车本体1的侧部,也可设于牵引车本体的车顶14两侧,这样,第二探测雷达22和第三探测雷达24的视场范围可易不受牵引车本体1的阻挡,从而使第二探测雷达22和第三探测雷达24的探测范围更大。
40.参见图1和图3,本技术一实施例,与上述实施例基本相同,不同之处在于,本实施例的飞机牵引车还可以包括第四探测雷达3,第四探测雷达3设于牵引车本体1的前端,用于探测飞机前方预定范围。
41.第四探测雷达3可以设于牵引车本体1的驾驶室车顶14的外部,形成的视场范围为2c。
42.通过将第四探测雷达3设于牵引车本体1的前端,可以在飞机牵引车牵引飞机时,辅助驾驶员判断前方是否有障碍,以及前方障碍到飞机机身的距离。
43.在本技术一个例子中,第一探测雷达20在牵引车本体上的设置位置,低于飞机机身底部。
44.飞机机身可为飞机上除机翼、机尾和起落架以外的部分,飞机机身底部可为飞机机身离地面距离最近的部位。
45.由于将第一探测雷达在牵引车本体上的设置位置,低于飞机机身底部,第一探测雷达的视场能够较为方便地穿过飞机下方而覆盖到飞机两侧机翼及两侧机翼前方的预定区域。
46.参见图4,本技术一实施例还提供一种飞机牵引系统,包括飞机02和上述任一实施例所述的飞机牵引车01,飞机02与飞机牵引车01相连。
47.下面以一具体实施例,说明本技术技术方案的实施方式,参见图1和图4。
48.采用5台3d激光雷达(本雷达视场为水平120
°
*垂直30
°
,探测范围为150米)。在飞机牵引车上雷达按以下位置排布:两台3d激光雷达20a和20b安装于牵引车后轮后方,朝向飞机成一定角度,两台雷达3d激光雷达#1(即第一雷达20a)和3d激光雷达#2(即第一雷达20b)视场交叉排布(本示例为雷达视场中心与牵引车车身轴线成60
°
夹角),另外三台3d激光雷达#3(即第四雷达3),3d激光雷达#4(即第二雷达22),3d激光雷达#5(即第三雷达24)分别安装于牵引车驾驶室车顶外部。其中第四雷达3安装与牵引车前方,第二雷达22和第三雷达24分别安装与牵引车顶两侧。
49.牵引车牵引飞机直行时,第二雷达22、第三雷达24即可探测到飞机机翼末端及机翼前方将要行驶过的空间。
50.当牵引车牵引飞机转弯行驶时,飞机外侧机翼末端被飞机机身遮挡,第二雷达22或第三雷达24将无法探测到转弯外侧机翼(转弯内测机翼仍可被探测)。当牵引车向右侧转弯时,安装于牵引车左侧后轮12a后方的第一雷达20a由于安装位置较低,仍然能够穿过飞
机下方,探测到飞机左侧机翼及机翼前方空间。同样,牵引车向左侧转弯时,对应外侧机翼将由安装于牵引车右侧后轮12b后方的第一雷达20b探测。
51.第四雷达3在行驶时辅助驾驶员判断前方障碍到飞机机身的距离。
52.本实施例的飞机牵引系统,在牵引飞机行驶过程中,依靠3d激光雷达辅助判断减少人为失误。本技术的雷达排布方式在飞机牵引行驶过程中转弯时,可以最大限度减少转弯外侧机翼的被探测盲区,以减少剐蹭等事故。(转弯时,飞机机身轴线与牵引车成一定夹角),本实例的雷达排布结构设计巧妙,可以覆盖各种尺寸飞机的机翼末端,以减少在牵引过程中机翼发生剐蹭等事故。
53.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
54.本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。
55.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。