1.本发明属于洗消设备技术领域,尤其涉及一种智能洗消枪及洗消系统。
背景技术:
2.随着科技的发展,社会的进步,人们的生活水平也越来越得到提高,人们更加注重生活品质和健康,在许多物品使用过后,需要严格进行清洗和消毒,从而保证物品的洁净程度和卫生等级,避免传染病的出现,在洗消过程中需要用到洗消枪,洗消枪,全称清洗消毒水枪。一般用于车辆清洗消毒,养殖场清洗消毒或者工程场地内的清洗消毒等商业用途。其中清洗环节,属于高压清洗,需要搭配高压清洗机抽取清水增压后通过洗消枪喷出,利用高压水流冲击物体表面,将污物冲洗干净。现有的洗消枪基本上都是纯机械结构,内部为铜管,尾部接高压清洗机输水管,头部接高压喷头,外壳采用金属或塑料橡胶包裹,通过扳机扣押打开铜管内的阀门,喷射高压水流。现有的洗消枪只能满足业务场景内高压水流冲洗和消毒的功能,无法通过洗消枪记录工人使用该设备进行工作的量化数据。
技术实现要素:
3.本发明实施例的目的在于提供一种智能洗消枪,旨在解决无法记录量化数据的问题。
4.本发明是这样实现的,一种智能洗消枪,所述智能洗消枪包括:
5.壳体,用于部件的安装;
6.进液管,用于与高压液源连通;
7.控制阀,安装在壳体的内部并进行自动复位,与进液管连通,用于控制洗消液喷出控制;
8.喷射头,连通控制阀,用于形成洗消液喷口;
9.定位模块,安装在壳体上,用于进行定位;
10.扳手,转动连接在壳体上,用于挤压控制阀进行控制;
11.扳机感应模块,用于感应扳手的开关;
12.供电模块,安装在壳体上,用于提供电能;
13.控制主板,与定位模块、扳机感应模块连接;
14.其中,将进液管连通高压洗消液,通过扳手挤压控制阀控制喷洒,通过扳机感应模块记录控制阀通液次数、通液时间,通过定位模块进行定位记录位置数据。
15.在本发明实施例中,将进液管连通高压洗消液,并使喷射头对准清洗设备或者车辆,挤压扳手,使扳手转动,扳手挤压控制阀控制喷洒,从而使进液管和喷射头连通,高压洗消液通过喷射头喷出,从而进行喷淋,挤压扳手时,通过扳机感应模块记录控制阀通液次数、通液时间,从而记录喷液量,通过定位模块进行定位记录位置数据,从而记录喷淋轨迹。从而对清洗时间、位置进行记录。实现了智能控制。
16.本发明的另一目的在于提供一种洗消系统,包括:
17.控制后台,用于接收数据、对信号进行处理;
18.定位基站;以及,
19.上述所述的一种智能洗消枪;
20.其中,定位基站至少设置有三个,并处于作业环境周边位置,通过定位基站与定位模块进行无线连接,通过定位基站与定位模块之间信号强度和方向夹角判断智能洗消枪的运动轨迹。从而可以实现了三维位置信息记录。
21.在本发明实施例中,将定位基站设置在作业环境的周边,使定位基站覆盖范围囊括作业环境,需要洗消的汽车或者货架之类的物品放置在作业环境中,将进液管连通高压洗消液,并使喷射头对准清洗设备或者车辆,挤压扳手,使扳手转动,扳手挤压控制阀控制喷洒,从而使进液管和喷射头连通,高压洗消液通过喷射头喷出,从而进行喷淋,挤压扳手时,通过扳机感应模块记录控制阀通液次数、通液时间,通过记录的时间和次数统计洗消时间和洗消工作量。从而记录喷液量,定位基站和通过定位基站与定位模块之间信号强度和方向夹角判断智能洗消枪的运动轨迹。从而可以实现了三维位置信息记录。定位模块的位置实时更新,可以进行每秒更新,从而进行实时记录,通过记录可以模拟出洗消轨迹。从而判定出洗消是否全面,有没有进行全面工作,判定洗消质量。定位模块发出信号,定位基站接收信号,根据信号强度可以判定定位模块和定位基站的相对位置,通过三点交叉判定确定定位模块位置,并通过角度进行确认,从而对定位模块定位精确。本发明优点:结构简单,控制方便,实现了三维定位,统计便捷。
附图说明
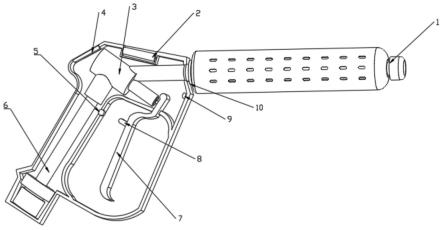
22.图1为本发明实施例提供的一种智能洗消枪的立体结构图;
23.图2为本发明实施例提供的一种智能洗消枪的流程示意图;
24.图3为本发明实施例提供的一种洗消系统的网络拓扑图;
25.图4为本发明实施例提供的一种洗消系统的定位原理示意图;
26.附图中:喷射头1,蓄电池2,控制阀3,控制主板4,霍尔感应器5,进液管6,扳手7,磁铁8,定位模块9,壳体10。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
28.以下结合具体实施例对本发明的具体实现进行详细描述。
29.如图1-2所示,为本发明实施例提供的一种智能洗消枪的结构图,包括:
30.壳体10,用于部件的安装;
31.进液管6,用于与高压液源连通;
32.控制阀3,安装在壳体10的内部并进行自动复位,与进液管6 连通,用于控制洗消液喷出控制;
33.喷射头1,连通控制阀3,用于形成洗消液喷口;
34.定位模块9,安装在壳体10上,用于进行定位;
35.扳手7,转动连接在壳体10上,用于挤压控制阀3进行控制;
36.扳机感应模块,用于感应扳手7的开关;
37.供电模块,安装在壳体10上,用于提供电能;
38.控制主板4,与定位模块9、扳机感应模块连接;
39.其中,将进液管6连通高压洗消液,通过扳手7挤压控制阀3控制喷洒,通过扳机感应模块记录控制阀3通液次数、通液时间,通过定位模块9进行定位记录位置数据。
40.在本发明实施例中,将进液管6连通高压洗消液,并使喷射头1 对准清洗设备或者车辆,挤压扳手7,使扳手7转动,扳手7挤压控制阀3控制喷洒,从而使进液管6和喷射头1连通,高压洗消液通过喷射头1喷出,从而进行喷淋,挤压扳手7时,通过扳机感应模块记录控制阀3通液次数、通液时间,从而记录喷液量,通过定位模块9 进行定位记录位置数据,从而记录喷淋轨迹。从而对清洗时间、位置进行记录。实现了智能控制。
41.在本发明的一个实例中,壳体10、控制阀3、扳手7、进液管6 可以是金属结构,尤其可以是铜制结构,从而增加了使用的机械强度,控制阀3为挤压控制阀,控制阀3可以通过复位件进行复位,复位件可以是弹簧等,通过喷射头1进行喷洒,喷洒出高压液源,从而进行清洗消毒,通过喷射头1可以喷出水雾,从而增加了喷淋面积。供电模块可以是蓄电池2、干电池等,为扳机感应模块、控制主板4、定位模块9提供电能,定位模块9为现有技术,在此不做赘述。进液管 6端部连接有连通件,通过连通件连通高压消液源,连通件可以是螺栓阀等。控制主板4、定位模块9和扳机感应模块通过导线进行连接。
42.作为本发明的一种优选实施例,扳机感应模块包括霍尔感应器5 和磁铁8,霍尔感应器5和磁铁8固定设置壳体10和扳手7上,转动扳手7从而使霍尔感应器5和磁铁8靠拢,当霍尔感应器5和磁铁 8靠近到一定距离时,从而进行感应并产生电流,磁铁8和霍尔感应器5接近进行记录第一时间点,霍尔感应器5和磁铁8远离进行记录第二时间点,并记录第一时间点和第二时间点之间的时间段。
43.作为本发明的另一种优选实施例,控制主板4包括逻辑处理单元和存储单元,逻辑处理单元用于处理扳机感应模块传送的数据,并对数据进行预处理,过滤杂波信息和信号毛刺,检测并识别按下时长是否符合正常喷水标准,并计算每次按压的时间差;储存单元用于储存数据信息,本地存储一段时间内的检测信号数据,以及通液次数、通液时间、位置数据,设备序列号等信息。同时逻辑处理单元还需要处理以下事情:看门狗识别逻辑,时间校准逻辑,数据读取逻辑,存储模块数据写入和读取逻辑,以及无线模块数据封装和收发逻辑,在此不做赘述。控制主板4还包括信号收发单元,进行信号传递。
44.如图3-4所示,本发明实施例还提供的一种洗消系统,包括:
45.控制后台,用于接收数据、对信号进行处理;
46.定位基站;以及,
47.上述所述的一种智能洗消枪;
48.其中,定位基站至少设置有三个,并处于作业环境周边位置,通过定位基站与定位模块9进行无线连接,通过定位基站与定位模块9 之间信号强度和方向夹角判断智能洗消枪的运动轨迹。从而可以实现了三维位置信息记录。
49.在本发明实施例中,将定位基站设置在作业环境的周边,使定位基站覆盖范围囊括作业环境,需要洗消的汽车或者货架之类的物品放置在作业环境中,将进液管6连通高压
洗消液,并使喷射头1对准清洗设备或者车辆,挤压扳手7,使扳手7转动,扳手7挤压控制阀3 控制喷洒,从而使进液管6和喷射头1连通,高压洗消液通过喷射头 1喷出,从而进行喷淋,挤压扳手7时,通过扳机感应模块记录控制阀3通液次数、通液时间,通过记录的时间和次数统计洗消时间和洗消工作量。从而记录喷液量,定位基站和通过定位基站与定位模块9 之间信号强度和方向夹角判断智能洗消枪的运动轨迹。从而可以实现了三维位置信息记录。定位模块9的位置实时更新,可以进行每秒更新,从而进行实时记录,通过记录可以模拟出洗消轨迹。从而判定出洗消是否全面,有没有进行全面工作,判定洗消质量。定位模块9发出信号,定位基站接收信号,根据信号强度可以判定定位模块9和定位基站的相对位置,通过三点交叉判定确定定位模块9位置,并通过角度进行确认,从而对定位模块9定位精确。
50.作为本发明的一种优选实施例,控制后台包括lora网关和云平台,通过lora网关对信号进行收集,并将信号传送给云平台进行二次处理,通过lora网关信号传递,节约成本、稳定性好、干扰性小、敏捷性好,能够并行接收并处理多个节点的数据,大大扩展了系统容量。通过云平台进行二次处理,便于查询和访问。定位基站用来收发报文数据,与lora网关进行通信,将需要上传到云平台的数据通过私有协议发送到平台用于分析处理。
51.本发明上述实施例中提供了一种智能洗消枪,并基于该智能洗消枪提供了一种洗消系统,通过扳机感应模块记录控制阀3通液次数、通液时间,通过记录的时间和次数统计洗消时间和洗消工作量。从而记录喷液量,定位基站和通过定位基站与定位模块9之间信号强度和方向夹角判断智能洗消枪的运动轨迹。从而可以实现了三维位置信息记录。定位模块9的位置实时更新,可以进行每秒更新,从而进行实时记录,通过记录可以模拟出洗消轨迹。从而判定出洗消是否全面,有没有进行全面工作,判定洗消质量。定位模块9发出信号,定位基站接收信号,根据信号强度可以判定定位模块9和定位基站的相对位置,通过三点交叉判定确定定位模块9位置,并通过角度进行确认,从而对定位模块9定位精确。
52.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。