1.本发明涉及下肢运动康复设备技术领域,具体为一种精确磁控功率的下肢运动康复设备。
背景技术:
2.随着我国人口老龄化进程加快,慢性疾病如心脑血管疾病日益严重,在相关技术中,需要一款设备能够精确评定患者的心肺功能,能够提供有效的训练方案,改善或恢复患者功能的医疗设备,因此,如何发明一种能够精确监测诊断和帮助患者康复的设备,成为了本领域技术人员亟待解决的问题。
3.在相关技术中,传统的康复设备,通常注重设备本身性能参数的要求,而忽略与患者病况、医师干预的要求,难以实时观察记录患者的身体状况,医生也无法及时判断并做出调整,不考虑患者的身体条件而进行盲目的运动是十分危险的。
4.因此,本技术提出了一种精确磁控功率的下肢运动康复设备,便于对患者运动过程中的训练强度进行调整,便于患者的康复训练,提高患者训练的效率。
技术实现要素:
5.为实现上述目的,本发明提供如下技术方案:一种精确磁控功率的下肢运动康复设备,包括硬件和软件两部分所述硬件部分包括底座、右壳体、左壳体、连接壳体、座椅升降及锁紧结构、车座、装饰壳、硅胶装饰件、立柱、控制装置、扶手锁紧机构、扶手、曲柄、踏板、驱动结构,所述底座上方后端设置有右壳体,所述右壳体左上方设置有左壳体,所述右壳体、左壳体上方与连接壳体连接,所述连接壳体上方内部设置有座椅升降及锁紧结构,所述座椅升降及锁紧结构上方设置有车座,所述底座上方前端设置有装饰壳,所述装饰壳上方设置有硅胶装饰件,所述装饰壳内部设置有立柱,所述立柱上方设置有扶手夹紧机构,所述扶手加紧机构两侧分别设置有扶手,所述扶手夹紧机构前端设置有控制装置,所述右壳体靠近左壳体的一端两侧分别转动连接有曲柄,所述曲柄下方外侧设置有踏板,所述右壳体与左壳体内部设置有驱动结构。
6.进一步的,所述扶手锁紧机构包括锁紧把手、车头夹紧盖、把手基座、车头基座,所述车头夹紧盖与把手基座上方通过螺钉连接,所述车头夹紧盖与把手基座相靠近的一侧分别开设有半圆形切槽,两个半圆形切槽拼接为一个整体圆形切槽,所述扶手设置在圆形切槽内,所述把手基座下方与立柱上方连接,所述车头夹紧盖与把手基座下方通过锁紧把手连接,所述把手基座与车头基座连接。
7.进一步的,所述驱动结构包括皮带轮一、皮带轮二、负载涡轮、框架组件、中轴、飞轮装置、负载轴、负载牵引绳一、传感器结构、负载牵引销、负载牵引绳二、牵引弹簧底座、负载牵引压簧、环头螺钉、皮带一、皮带二,所述框架组件右侧上方设置有中轴,所述中轴一端设置有皮带轮一,所述框架组件右侧且位于中轴下方设置有负载轴,所述负载轴一侧设置有飞轮装置,所述皮带轮一与飞轮装置之间通过皮带一传动连接,所述负载轴一侧还设置
有皮带轮二,所述框架组件前端设置有负载涡轮,所述皮带轮二与负载涡轮之间通过皮带二传动连接;所述传感器结构安装在框架组件左侧下方的螺丝孔内,所述涡轮负载两侧分别设置有两个负载牵引销,左侧的负载牵引销与负载牵引绳一连接,所述负载牵引绳一另一端与传感连接,右侧的负载牵引销与负载牵引绳二连接,所述负载牵引绳二的另一端分别穿过环头螺钉、负载牵引压簧、牵引弹簧底座,所述负载牵引压簧上方和环头螺钉下方接触连接,负载牵引压簧下方与牵引弹簧底座上方接触连接。
8.进一步的,所述皮带轮一与飞轮装置安装在同一侧;所述皮带轮二与负载涡轮安装柱同一侧。
9.进一步的,所述皮带轮二位于飞轮装置后端。
10.进一步的,两个所述曲柄分别与中轴两端转动连接。
11.进一步的,所述传感器结构内部包含多个传感器,分别为血氧传感器、血压传感器、心率传感器以及踏车转速传感器。
12.进一步的,所述软件部分包括训练方案设置页面、训练运动主页面,所述训练方案设置页面用于设置训练方案,设置训练方案参数,保存预设方案;通过系统内预置方案,每个方案对应着不同参数设定。同时也可以添加为预设方案,保存在本地数据库,可以下次进入程序时使用,且在选定预设方案时,参数为不可编辑状态。
13.进一步的,所述训练运动主页面:用于连接心电设备、运动设备,显示心电、血氧、血压、心率、功率、转速或速度、坡度,并按照设置参数下发控制运动设备命令。
14.与现有技术相比,本发明的有益效果是:本发明通过硬件和软件相配合,由平板电脑控制下发负荷运动方案,当病人在踏车上正向踩踏脚踏板时,踏板连接曲柄带动中轴转动,驱动结构开始工作,手动录入患者信息和预期的训练方案,并使用多个传感器采集患者实时状态参数,对患者的心率、血氧、血压等数据处理分析后,随着运动进行患者状态改变,设备不断调整设备功率,病人将在指定的运动方案负荷下运动,运动负荷功率可以精确到一瓦特,用户可以指定运动方案、运动功率并且实时监控速度,进而可以实时的调整运动强度,进而实现自动控制,便于患者的康复训练,提高患者训练的效率。
附图说明
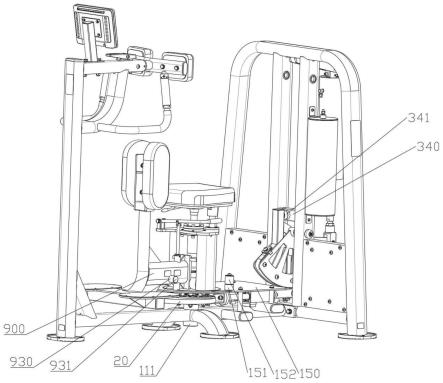
15.图1为本发明的外部结构示意图;
16.图2为本发明的扶手锁紧机构的结构示意图;
17.图3是本发明的驱动结构的结构示意图。
18.图4是本发明的传感器的系统连接示意图;
19.图5是本发明的软件部分的流程示意图。
20.图中:1、底座;2、右壳体;3、左壳体;4、连接壳体;5、座椅升降及锁紧结构;6、车座;7、装饰壳;8、硅胶装饰件;9、立柱;10、控制装置;11、扶手锁紧机构;12、扶手;13、曲柄;14、踏板;15、锁紧把手;16、车头夹紧盖;17、把手基座;18、皮带轮一;19、皮带轮二;20、负载涡轮;21、框架组件;22、中轴;23、飞轮装置;24、负载轴;25、负载牵引绳一;26、传感器;27、负载牵引销;28、负载牵引绳二;29、牵引弹簧底座;30、负载牵引压簧;31、环头螺钉;32、皮带轮三;33、轮轴;34、皮带一;35、皮带二;36、车头基座。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.如附图1所示,本发明提供的一种实施例一种精确磁控功率的下肢运动康复设备,包括硬件和软件两部分,所述硬件部分包括底座1、右壳体2、左壳体3、连接壳体4、座椅升降及锁紧结构5、车座6、装饰壳7、硅胶装饰件8、立柱9、控制装置10、扶手锁紧机构11、扶手12、曲柄13、踏板14、驱动结构,所述底座1上方后端设置有右壳体2,所述右壳体2左上方设置有左壳体3,所述右壳体2、左壳体3上方与连接壳体4连接,所述连接壳体4上方内部设置有座椅升降及锁紧结构5,所述座椅升降及锁紧结构5上方设置有车座6,所述底座1上方前端设置有装饰壳7,所述装饰壳7上方设置有硅胶装饰件8,所述装饰壳7内部设置有立柱9,所述立柱9上方设置有扶手夹紧机构11,所述扶手加紧机构11两侧分别设置有扶手12,所述扶手夹紧机构11前端设置有控制装置10,所述右壳体2靠近左壳体3的一端两侧分别转动连接有曲柄13,所述曲柄13下方外侧设置有踏板14,所述右壳体2与左壳体3内部设置有驱动结构。
23.如附图2所示,所述扶手锁紧机构11包括锁紧把手15、车头夹紧盖16、把手基座17、车头基座36,所述车头夹紧盖16与把手基座17上方通过螺钉连接,所述车头夹紧盖16与把手基座17相靠近的一侧分别开设有半圆形切槽,两个半圆形切槽拼接为一个整体圆形切槽,所述扶手12设置在圆形切槽内,所述把手基座17下方与立柱9上方连接,所述车头夹紧盖16与把手基座17下方通过锁紧把手15连接,所述把手基座17与车头基座36连接;
24.当逆时针拧锁紧把手15时,车头夹紧盖16和把手基座17对扶手12无夹紧作用,此时扶手12可沿着圆周方向自由旋转,反之,当顺时针拧紧锁紧把手15时,车头夹紧盖16和把手基座17对扶手12产生夹紧作用,此时扶手12被固定在圆周的任一位置。
25.如附图3所示,所述驱动结构包括皮带轮一18、皮带轮二19、负载涡轮20、框架组件21、中轴22、飞轮装置23、负载轴24、负载牵引绳一25、传感器结构26、负载牵引销27、负载牵引绳28、牵引弹簧底座29、负载牵引压簧30、环头螺钉31、皮带一32、皮带二33,所述框架组件21右侧上方设置有中轴22,所述中轴22一端设置有皮带轮一18,所述框架组件21右侧且位于中轴22下方设置有负载轴24,所述负载轴24一侧设置有飞轮装置23,所述皮带轮一18与飞轮装置23之间通过皮带一32传动连接,所述负载轴24一侧还设置有皮带轮二19,所述框架组件21前端设置有负载涡轮20,所述皮带轮二19与负载涡轮20之间通过皮带二33传动连接;所述传感器结构26安装在框架组件21左侧下方的螺丝孔内,所述涡轮负载20两侧分别设置有两个负载牵引销27,左侧的负载牵引销与负载牵引绳一25连接,所述负载牵引绳一25另一端与传感26连接,右侧的负载牵引销与负载牵引绳二28连接,所述负载牵引绳二28的另一端分别穿过环头螺钉31、负载牵引压簧30、牵引弹簧底座29,所述负载牵引压簧30上方和环头螺钉31下方接触连接,负载牵引压簧30下方与牵引弹簧底座29上方接触连接;
26.当中轴22转动时,通过皮带一32带动负载轴24转动,负载轴24转动带动皮带轮二19转动,皮带轮二19转动使得皮带二33传动带动负载涡轮20转动,当中轴22反转或停止转动时,负载轴24上的飞轮装置23不再带动皮带轮二19转动,负载涡轮20再负载的作用下由于惯性可能正向转动或者停止运动。
27.具体的,所述皮带轮一18与飞轮装置23安装在同一侧;所述皮带轮二19与负载涡
轮20安装柱同一侧。
28.具体的,所述皮带轮二19位于飞轮装置23后端。
29.具体的,两个所述曲柄13分别与中轴22两端转动连接。
30.具体的,设备本体可分为车头和车身两大部分,车头部分主要用于采集患者数据并上传;车身主要用于控制患者的训练强度,所述传感器结构26内部包含多个传感器,分别为血氧传感器、血压传感器、心率传感器以及踏车转速传感器;如附图4所示,患者数据通过多个传感器来采集,这些数据会通过车头传输给上位机,蓝牙传输的无线方式更加方便快捷,除了可以在上位机观察患者数据,车头上的控制装置10也会显示当前转速,通常康复训练会要求患者蹬车的转速维持在60转每秒,并通过改变功率来调整训练强度,患者的状态随着训练的进行被实时显示与记录下来,上位机处理分析后再下发合适的功率。
31.传感器结构26采集的数据可作为功率调整的参数,如心率:选择心率恒定方案后,当患者心率低于设置的上限时,自动增加功率;而当患者心率超过设置的上限时,会自动降低功率,以保证患者的安全,采集到的数据及处理结果会保存到服务器上,以便日后查看分析。
32.功率控制的原理是:由上位机下发功率数值,范围在0-180之间,功率的初始值为0,功率越高,患者会感觉越费力,蹬车越累,车头通过蓝牙接收到功率数值后,会按比例调整pwm的占空比,进而改变电压,根据u=ir,在电阻不变时,电压增大,电流也会增大;根据电生磁:f=bil,电流越大,产生的磁场越强,磁场成圆形,会对蹬车产生阻力,此时磁性增强,需要克服磁力做的功增多,也就更费力,从患者角度来看,就是增大了蹬车的强度,使其需要更大的力才能维持转速不变,反之同理,以此调整训练强度。
33.如附图5所示,所述软件部分包括训练方案设置页面、训练运动主页面,所述训练方案设置页面用于设置训练方案,设置训练方案参数,保存预设方案;通过系统内预置方案,所述系统内预置方案包括踏车-功率目标-恒定、踏车-功率目标-递增、踏车-功率目标-脉冲、踏车-心率目标-恒定、踏车-心率目标-递增、踏车-心率目标-脉冲、平板-心率目标-恒定、平板-速度目标-恒定、自由式-6分钟步行、自由式-踏车、自由式-平板,每个方案对应着不同参数设定。同时也可以添加为预设方案,保存在本地数据库,可以下次进入程序时使用,且在选定预设方案时,参数为不可编辑状态。
34.所述训练运动主页面:用于连接心电设备、运动设备,显示心电、血氧、血压、心率、功率、转速或速度、坡度,并按照设置参数下发控制运动设备命令;程序可以通过平板电脑的蓝牙与心电设备进行连接,传输并显示心电波形,计算心率,与踏车、平板运动设备连接,可以显示功率、速度、坡度,如果运动设备同时连接血压计、血氧计,平板电脑可以通过蓝牙下发测量血压命令,并在测量成功后接收到运动设备返回的血压信息并显示在页面上,平板电脑可以接收到运动设备返回的血氧信息并显示在页面上,接着平板电脑按照训练设置页面设置的参数信息,进行相应计算,通过蓝牙向运动设备发送对应的功率、速度、坡度的信息,进行运动设备的控制,按照训练设置页面的参数,进行倒计时,并做出相应操作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。