倒立训练装置
背景技术:
1.学习倒立对运动员来说是一个很大的挑战,因为对于实施倒立需要大量的运动动作。例如,在倒立时首先需要协调手指工作、手部角度、前臂力量、肩部角度、肩部开口、髋部角度、腿部位置、头部倾斜和目光固定点。因此,倒立是一种高度复杂的、控制不同肌肉和身体区域的系统。练习倒立的人们几乎都是用墙壁作为支撑手段,从而使得主要是脚部得到支撑。使用墙壁是为了在失去平衡的情况下移动腿部,并将两脚或一只脚移到墙上以便暂时稳定。这样做的缺点是,进入休息状态的身体必须通过腿部较大的运动再次躁动,其中在倒立时,哪怕身体不同部分最微小的运动就已经足以维持或失去平衡。也有一些特殊的装置,这些装置可以支撑躯干或腿部,其具有的效果在于自由保持的倒立得到稳定。
2.然而存在一个众所周知的问题,以这种方式训练的人们几乎永远无法在没有这些辅助工具的情况下保持倒立,因为所有涉及的肌肉和神经都对上述辅助工具形成了条件依赖。
技术实现要素:
3.本发明是在上述现有技术的背景下开发的。本发明的目的在于提出一种倒立训练装置,通过所述装置,使用者可以学习倒立,并最终在倒立时不借助任何装置的情况下自由地立住。
4.该目的是通过提供一种倒立训练装置来解决的,该装置具有一个用于相关手臂的、带有一个基本上垂直延伸的支承面的支撑元件。在训练过程中,手部以其掌心面被如此置于手部支承面上或被手部支承面包围,使得手臂就会被支撑在支撑元件的手臂支承面上。如果身体和腿部在旋转运动中向上加速,那么由于支承面的静态特性,手臂被带入一个沿训练者的摆动方向上固定的位置中,这是对翻倒相当大的抑制,从而使得训练者的低重心区域很大程度上被固定。手臂被保持在垂直位置中,并且可靠地防止了翻转。
5.由于被支撑的不是脚、腿或背部,而是手臂,因此产生了一种特殊的训练效果,即在经过一段时间的练习后,可以实现自由手倒立,这是因为训练者可以有针对性地训练主要负责平衡的身体区域如腿部、髋部和肩胛带,而不必通过将脚移动到墙上而不必要地使这些身体区域进行运动,并且由此使这些身体区域在集中定向后失去平衡。因此,通过该倒立训练装置,训练者得到了一种对于训练有素的前臂肌肉的替代物,所述前臂肌肉将手指压在地面表面,因此在训练者的低重心区域提供稳定的基础,而不是在髋部、腿部和背部的高重心区域提供稳定。
6.下文描述本发明具有非限制性附加特征的有利实施方式。可设置例如一个可竖立在地面上的撑脚作为底座元件,该撑脚具有一个相对于地面的水平面也基本上是水平的、用于手的支承面。
7.基座元件也可以构造成用于外部的运动设备的紧固元件,其尤其是具有一个横杆。横杆则形成了握住横杆的手的支承面。这使得倒立训练装置可以在其他各种运动设备上使用,而这些运动设备并不属于本发明的组成部分。通过固定在与地表平行的单杠上,可
以进行各种形式的、利用这些单杠或者双杠的练习。例如,体操运动员可以进行倒立俯卧撑或其他练习,在这些练习中,手臂支架不仅是垂直固定的,而且是可以围绕横杆旋转的任何角度,这使得能够适应相对于扶手变化的手臂角度。
8.如此构造训练装置,即在倒立时,身体重量力从所述手部传递到所述手部支承面,并且由此使得,即使在所述手臂的力作用在所述支撑元件上时,所述基座元件也能稳定地保持在地面上。
9.至少一个、相对于地面或手部支撑面基本上垂直延伸的支架固定在所述基座元件上,支撑元件布置在所述支架上。在使用时,除拇指外,放在手部支承面的手的手指都指向支架的方向。在支架和支撑元件之间设置一个间隔件,所述间隔件相对于所述支架基本上正交布置。间隔件具有一个导引元件,并且支架具有一个互补的导引部,从而使得所述间隔件构造成可沿所述支架位移并可调整其高度。由此使得手臂可以在不同的区域、例如在下臂到手腕的区域或在上臂的区域中得到支撑。通过连续降低间隔件的高度,练习者可以使他的神经系统习惯于减少的支撑效果,减少的支撑效果可使他能够独立于设备。与利用墙进行的练习不同的是,如此可以无需任何训练设备,便快速实现消除支撑和自由保持倒立。
10.间隔件构造成在其长度上可调整的,并且尤其是可延伸和缩回的伸缩式的和/或可锁定的。由此,支撑元件的位置能够适应训练者的解剖结构或者说手指长度,其导致了手在手部支承面上的不同位置,并且由此导致手臂和支撑元件之间的距离变化。
11.支架具有一个用于调整高度的刻度。当两个手臂使用两个训练装置时,支撑元件可以因此被调整到相同的高度。
12.在另一种实施方式中,倒立训练装置是一体构造的,并且例如通过注塑成型方法制造。由此,训练装置特别紧凑,并且生产的成本较低。
13.在另一种实施方式中,设置两个间隔的支架,并且所述支撑元件优选可以调节高度地布置在两个所述支架之间。
14.支撑元件固定在基本上水平延伸的保持元件上,保持元件尤其是构造成带状或接片,并且基本上水平地延伸。保持元件的两端分别可拆卸地固定在两个支架之一上。
15.为了将保持元件固定在支架上,设有多个钩状的凹口,保持元件可挂在所需高度上。撑脚在底侧和/或用于手部的支承面上分别具有防滑结构或涂层。
16.本发明进一步包括一个分别用于使用两只手或者说用于支撑两个手臂的套装,所述套装包括上述特征组合的两个倒立训练装置。倒立训练装置在使用中适当地并排布置。
附图说明
17.附图详细示出了:
18.图1是从侧前方观察的倒立训练装置的立体图;
19.图2是从侧后方观察的、倒立训练装置的立体图;
20.图3a是倒立训练装置的侧视图,其带有处于上方位置的支撑元件和使用者;
21.图3b是倒立训练装置的侧视图,其带有处于中间位置的支撑元件和使用者;
22.图3c是倒立训练装置的侧视图,其带有处于下方位置的支撑元件和使用者;
23.图4是倒立训练装置的第二个实施方式侧视图,其带有使用者;
24.图5是倒立训练装置的第三个实施方式的详细立体图;
25.图6是倒立训练装置的第四个实施方式的立体图;并且
26.图7是倒立训练装置的第五个实施方式的立体图。
27.功能相同的部件用相同的附图标记进行标记。
具体实施方式
28.下面将参照附图详细描述本发明的示例性的实施方式,其中从附图中能够得到其他的有利的特征。
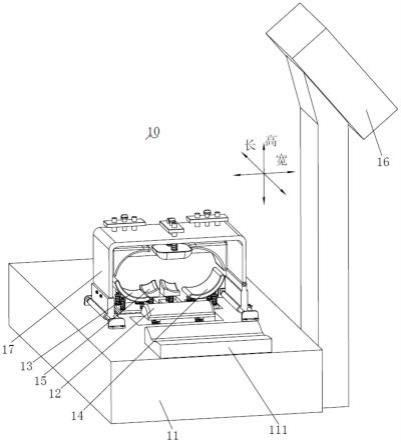
29.图1示出了从正面和侧面角度观察倒立训练装置10的视图。倒立训练装置10具有一个撑脚11作为下部底座,撑脚可以竖立在地面上。在其底侧上设置一个防滑的橡胶涂层20',以防止在练习中打滑。在上侧,撑脚11具有一个近似椭圆形的、水平的、用于右手或左手的支承面12,其中该支承面也有防滑涂层20。
30.在撑脚11的后端固定有一个具有大概方形截面的垂直的支架15,也就是说,支架15具有方形轮廓的形状。支架15具有一个垂直或平行于其纵轴的凹槽,所述凹槽18,用作导引元件17的导引部。
31.导引元件17以可连续垂直位移的方式固定在支架15上。它有一个立方体状的外部形状。在导引元件17上固定有一个相应的榫接合部21,榫接合部与凹槽18啮合。导引元件17包围了四边形的支架15的四个表面的其中一个区域,四个表面由此作为额外的导引部。由此,导引元件17可以上下移动,并且仍然可靠地固定在支架15上。
32.一个水平延伸的间隔件16以其后端固定在导引元件17上。用于手臂的支撑元件13固定在间隔件16的相对的前端上。支撑元件13包括一个相对于地面基本上垂直的手臂支承面14,所述手臂支承面呈凹形弯曲,并且如此适应贴合着的手臂的形状。
33.图2示出了从侧面和后面观察的倒立训练装置的立体图。图中示出了,支架15在后侧上具有一个用于在确定的高度中调整支撑元件13的刻度19。为了进行调整,在导引元件17的后侧上设置一个带有指示器23的凹处22。
34.图3a至3c示出了倒立训练装置10和使用者50的侧视图,其中支撑元件13分别被设置成不同的高度。由于支撑元件13的高度是可连续调节的,也可以设置成所有的中间位置(未示出)。图中示出了处于倒立初始阶段的使用者50,在所述初始阶段时,他的上身仍处于水平位置。此时,使用者的手部51是贴靠在手部支承面12上的。由此,身体重量力从手部51转移到手部支承面12上,并且撑脚被压靠在地面上。由此,尽管手臂52的力量作用在支撑元件13上,训练装置10仍然稳定地保持在地面上,且不能翻倒。
35.在图3a中,支撑元件13被推到最高位置。由此上臂53得到了支撑。
36.这种设置特别适合于初学者,这是因为通过手臂52的杠杆力提供了最大的支撑效果。图3b示出了处于中间位置的支撑元件13,其中手臂52在手臂关节的区域被支撑。这种设置适合于进阶的使用者50,这是因为支撑效果处于中间范围。
37.图3c示出了处于最低位置支撑元件13,其中手臂52被支撑在手腕的区域。这个设置适合于非常高阶的使用者52,这是因为支撑效果只是轻微的。如果使用者可以在图3c所示的最低位置安全地进行倒立,那么在随后最后的训练阶段不需要任何设备就可以训练自由倒立。也可以先利用两个装置10组成的一组设备对用两只手臂52进行训练,然后只用一个装置10对一只手臂52进行训练,最后自由训练。
38.图4示出了倒立训练装置10'的第二个实施方式的侧视图,其带有使用者50。
39.该实施方式10'是一体构造的。就像之前示出的实施方式10一样,该实施方式具有一个带有手部支承面12的撑脚11。然而,撑脚11直接过渡到s形弯曲的支架15和末端的支撑元件13。
40.图5示出了倒立训练装置10"的第三个实施方式的详细立体图。如图1所示,垂直的、带有导引元件17、水平延伸的间隔件16和支撑元件13的支架15被示出。为此,间隔件16是空心的。一个牵伸元件24可位移地布置在空腔中。在牵伸元件24中设有多个间隔的开口25。间隔件16在末端区域具有一个开口25'。牵伸元件24可以被紧固在一个位置上,在所述位置上,通过将一个销子26穿过两个开口,它的其中一个开口25与间隔件16的开口25'重合。因此,间隔件16的长度是可以调整的,这样支撑元件13与支架15的间距就可以改变。调节位置的数量与牵伸元件24中的孔25的数量相对应。
41.图6示出了倒立训练装置10'"的第四个实施方式的透视图。与其他实施方式一样,该实施方式也具有一个可竖立在地面上的撑脚11和一个支撑元件13,所述撑脚带有用于右手或左手51的、水平的支承面12。然而,不是一个支架15,而是两个垂直支架15以一定的距离固定在撑脚11上,其中支撑元件13布置在两个支架之间。其固定在一个水平延伸的带子27上,其两端分别可拆卸地固定在一个支架15上。为了固定带子27,在支架15上设有几个钩状的凹口28,在所述凹口处,带子27可以被固定在所需的高度上。
42.图7示出了倒立训练装置100的第五个实施方式的立体图。该实施方式100的上部区段与图1所示倒立训练装置10的上部区段基本上相同。该上部区段包括带有导引元件17的、垂直的支架15,导引元件可垂直位移地固定在支架15上。在导引元件17上设有水平延伸的间隔件16,间隔件16带有支撑元件13及其手臂支承面14。
43.一个用于外部的运动装置200的紧固元件111用作下部的基座元件。运动器材200具有一个圆形的横杆201,所述横杆形成手部51(未示出)的支承面12。
44.基座元件或紧固元件111构造成一个夹子,所述夹子包围横杆201并且以这种方式将倒立训练装置100固定在运动设备200上。
45.附图标记列表
46.10.倒立训练装置
47.11.撑脚
48.12.手部支承面
49.13.支撑元件
50.14.手臂支承面
51.15.支架
52.16.间隔件
53.17.导引元件
54.18.导引部
55.19.刻度
56.20.涂层
57.21.导引榫接合部
58.22.凹处
59.23.指示器
60.24.牵伸元件
61.25.开口
62.26.销子
63.27.带子
64.28.凹口
65.50.人
66.51.手部
67.52.手臂
68.53.上臂
69.54.手臂关节
70.55.前臂
71.100.倒立训练装置
72.111.紧固元件
73.200.运动设备
74.201.横杆。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。